
卫星姿态控制系统的可重构性指标分配1
2014-08-09 22:15项昌毅程月华刘成瑞
航天控制 2014年2期
项昌毅 杨 浩 程月华 姜 斌 刘成瑞
1.南京航空航天大学自动化学院,南京 210016 2.南京航空航天大学高新技术研究院,南京 210016 3.北京控制工程研究所, 北京200233 4.北京市空间智能控制技术重点实验室, 北京200233
卫星姿态控制系统的可重构性指标分配1
项昌毅1杨 浩1程月华2姜 斌1刘成瑞3,4
1.南京航空航天大学自动化学院,南京 210016 2.南京航空航天大学高新技术研究院,南京 210016 3.北京控制工程研究所, 北京200233 4.北京市空间智能控制技术重点实验室, 北京200233

研究有约束条件下的可重构性指标分配问题,旨在为卫星姿态控制系统的可重构性指标分配找到合理的解决方案。结合卫星姿态控制系统可重构性统计数据不足的特点以及资源最优化的要求,将可重构性指标分配分为初次分配和再分配,由于卫星姿态控制系统因素指标的不确定性以及人的认识的模糊性,提出基于模糊综合评价法的可重构性指标初次分配,仿真结果显示了该方法的有效性。针对系统资源优化配置的要求,提出一种基于启发式算法的可重构性指标再分配,该方法可解决约束条件内资源最优配置问题,并得到接近或者超过系统可重构度的最优解,最后将该算法用于卫星姿态控制系统仿真,与直接寻查法的分配结果作比较,显示了新算法更好的适用性。由于所提的方法计算量较小,结果较精确,在工程领域具有很好的实际意义。
可重构性;可重构度;可重构性指标分配;卫星姿态控制系统;模糊综合评价法;启发式算法
随着空间技术的不断发展,卫星的应用越来越广泛。由于卫星长期运行在失重和强辐射的深空环境中,机械或电气部件的老化或磨损难免会造成部件故障,由此导致稳定度和控制精度等性能降低,甚至卫星控制系统的崩溃[1]。为了解决这些问题,许多学者展开了广泛深入的研究,其中自适应控制、最优控制、反馈控制、H∞ 控制及综合控制方法[2-6]在卫星姿态控制中得到了广泛的研究和应用。上述研究均通过控制率重构等方法实现卫星欠驱动控制,由于卫星特殊的工作任务,通常重要部件是有冗余备份的,当冗余代替故障部件工作时,控制精度等性能指标与原系统没有差别。因此,对部件冗余情况下的系统故障重构能力研究是非常有意义的[7-10]。
重构指系统从一种构形向另一种构形的转换,是系统生存和发展的基本手段[11]。可重构性[12]指系统在一定条件下完成重构的能力。本文以卫星姿态控制系统为对象,提出一种可重构性指标分配的理论方法,用于系统可重构度最大的优化配置,最后通过仿真验证了所提方法的有效性。
1 可重构度描述
本文解决的主要问题是卫星姿态控制系统的可重构性指标分配。卫星姿态控制系统是控制卫星姿态的系统,由控制器、执行器和传感器等3个分系统串联组成。可重构性指标分配是指将使用方提出的可重构性指标,从上而下分配到各分系统,设计最优化配置以满足系统的可重构性要求。
在讨论可重构性指标分配之前要明确什么是可重构性指标,本文将可重构性指标称为可重构度。从工程实际出发,在轨卫星发生部件故障后,优先采用的是硬件备份切换方式来重构系统。假定部件之间没有故障关联,故障部件切换成功率达100%。当系统中只有一个独立功能的部件发生故障时,定义为一重故障。同理,n重故障定义为同时有n个部件发生故障。当卫星发生n重故障时,该可重构性指标称为n重可重构度。
定义1:当系统发生n重故障时,系统的n重可重构度为:
n重可重构度=
(1)
其中,0≤R≤1。由于卫星部件较高的可靠性,本文进行可重构性指标分配时只考虑二重故障,其它多重故障可重构性指标分配的步骤原理和二重故障是一致的。
1.1 二重可重构度计算
假设系统第k(k=1,2,3,分别表示控制器、执行器和传感器)个分系统有mk个部件,其中可重构的一重故障有n1k(右下角标1表示一重故障)个,可重构的二重故障有n2k(右下角标2表示二重故障)个,则该系统二重可重构度R为:
(2)
从上述可重构度的定义看出,系统冗余的部件数越多,并不意味着可重构度就越高,可重构度的大小还与系统的配置方案有关。
2 卫星姿态控制系统的可重构性指标分配
由于可重构性统计数据不足的特点以及资源最优化要求,将卫星姿态控制系统的二重可重构度分配分为2个过程进行讨论:初次分配和再分配。基本框图如图1所示。
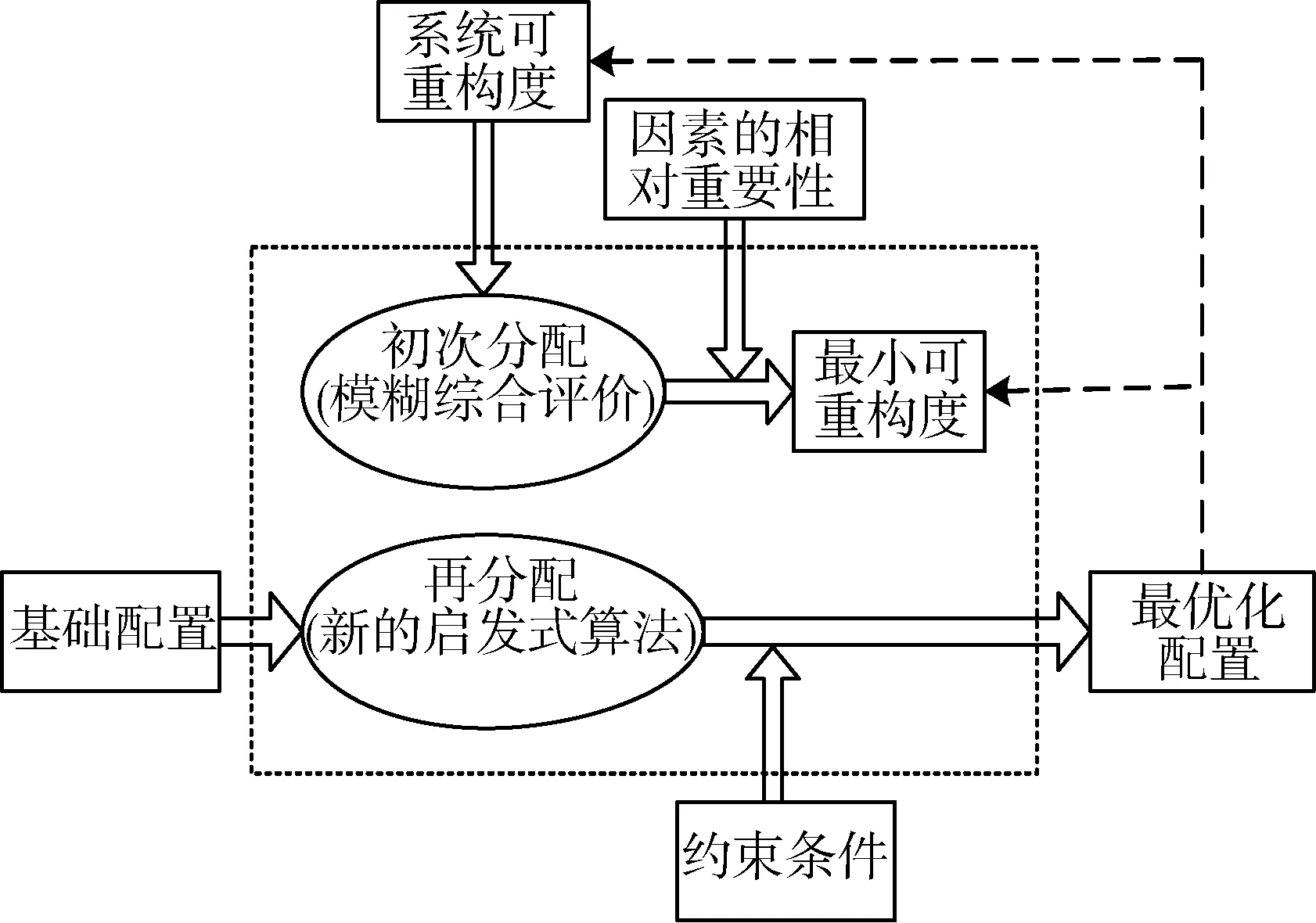
图1 可重构性指标分配方法框图
2.1 可重构性指标初次分配
卫星姿态控制系统包含3个分系统,在执行重构任务时每个分系统的可重构性要求各不相同,受到主观评价不准确等方面的限制,有些因素很难用经典数学进行描述,所以借鉴模糊数学的理论,因为这种评价过程涉及模糊因素, 故称这种评价是模糊综合评价或模糊综合决策[13]。图2所示是模糊综合评价法的基本流程。
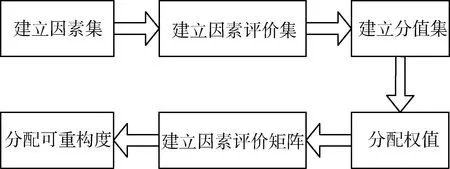
图2 模糊综合评价分配法的基本流程图
(1) 建立因素集、因素评价集及相应的分值集
为了全面分析可重构性指标,评价指标的选取应遵循全面性、唯一性、科学性和可操作性等原则。依据上述规则,因素集U可取为:U={重量,经济,能耗,可靠性,控制精度,故障可诊断性,重构风险性}
(3)
根据上述因素的特点,可把各个因素用以下5个评价等级来描述:低,较低,一般,较高和高。因素评价集Vi:
Vi={低,较低,一般,较高,高}
(4)
其中,i=1,2,…,7为因素指标,j=1,2,…,5为等级指标,vij表示第i个因素的第j个等级。
对综合评价指标采用量化处理,给予卫星姿态控制系统各因素的每个评价等级一个相应的分值cj,等级1分值记为20,等级2记为21,等级3记为22,等级4记为23,等级5记为24。则因素评价等级对应的分值集C为:
C={c1,c2,c3,c4,c5}={1,2,4,8,16}
(5)
(2) 权值计算
可重构性指标因素之间重要性并不相同,需要给各因素赋予不同的权值,在缺乏样本数据的情况下, 为了提高分配权值的可信度,采用层次分析法[14]。
1) 按照表1规则,由专家比较并给出可重构性指标因素之间的重要程度。
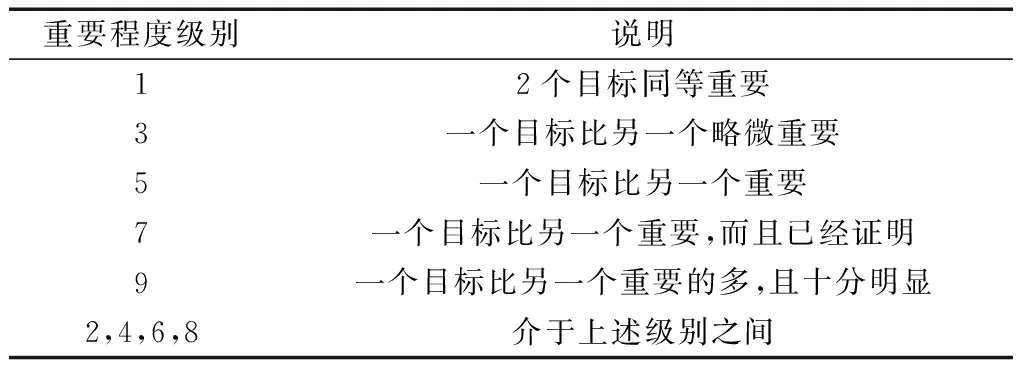
表1 重要程度级别的说明
经过比较两两因素之间的重要性,可以得到一个7×7的判断矩阵A。 由于这一过程是将定性思维定量化的过程,有时难以给出精确的比较判断,可能引起判断的不一致。因而还需对判断矩阵进行一致性检验。
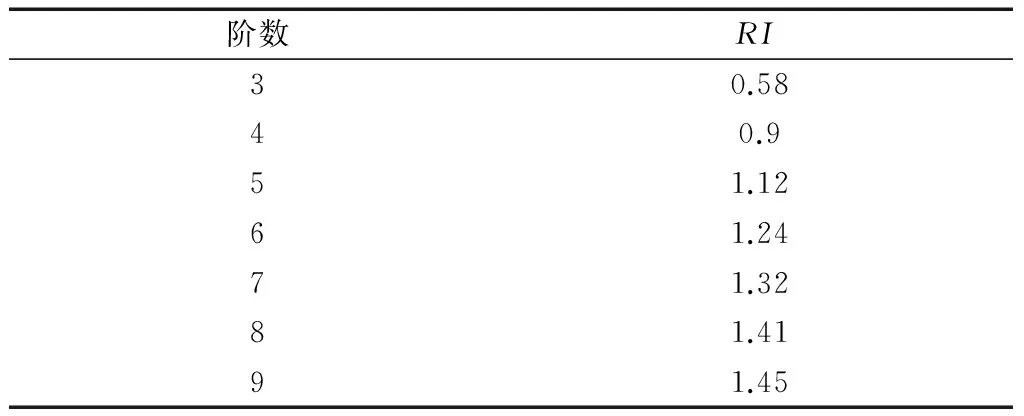
表2 A矩阵阶数与RI
一般地,当CR<0.1 时,可以认为判断矩阵具有满意一致性,否则需要重新调整判断矩阵。
2)求出权重
A中每行元素连乘开7次方:
(6)
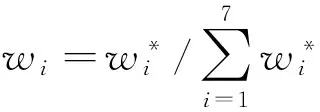
(7)
3)得到权重矩阵
W=(w1,…,wi, …,w7)
(8)
(3) 因素评价矩阵
对可重构性指标第i个因素进行评价,评价对象隶属于第j个等级的隶属度为rij(i=1,2,…,7;j=1,2,…,5;0≤rij≤1),建立卫星姿态控制系统第k(k=1,2,3)个分系统的因素评判矩阵Dk:
(9)
评判矩阵Dk是通过若干专家对各个分系统在各个因素的不同等级上作0到1之间某个数值的隶属度判断,经统计处理后得到。
(4) 分配最小可重构度
由模糊变换可得卫星姿态控制系统第k个分系统的模糊评价集为:
Bk=W∘Dk=(b1,b2,…,b7)
(10)式中,符号∘为模糊算子,为了尽量保留全部的有用信息,采用实数加乘法计算模型M (*,+)进行计算:
(11)
将第k个分系统的模糊评价矩阵Bk和分值集C相乘,可得该分系统综合评价分值dk:
dk=Bk·CT
(12)
设卫星姿态控制系统二重可重构度的目标值为R,则第k个分系统所分配的最小二重可重构度:
(13)
由上述步骤可得分系统的二重可重构度,在这个基础上进行可重构性指标的再分配。
2.2 可重构性指标再分配
再分配是在初次分配的基础上进行的,需要考虑约束条件,同时满足系统的二重可重构度和分系统的最小可重构度的要求。由于启发式算法[15-16]计算量少且能获得接近系统最优性能的解,故在冗余分配中有一定的应用。综合考虑能耗和性能指标的要求,所以在指标冗余分配中有一定应用。
在介绍所提方法之前,首先了解一下卫星姿态控制系统部件的安装方式。为了便于研究可重构性指标分配方法,简化系统模型,这里考虑的执行器和传感器分别由多个单一的飞轮和陀螺组成。
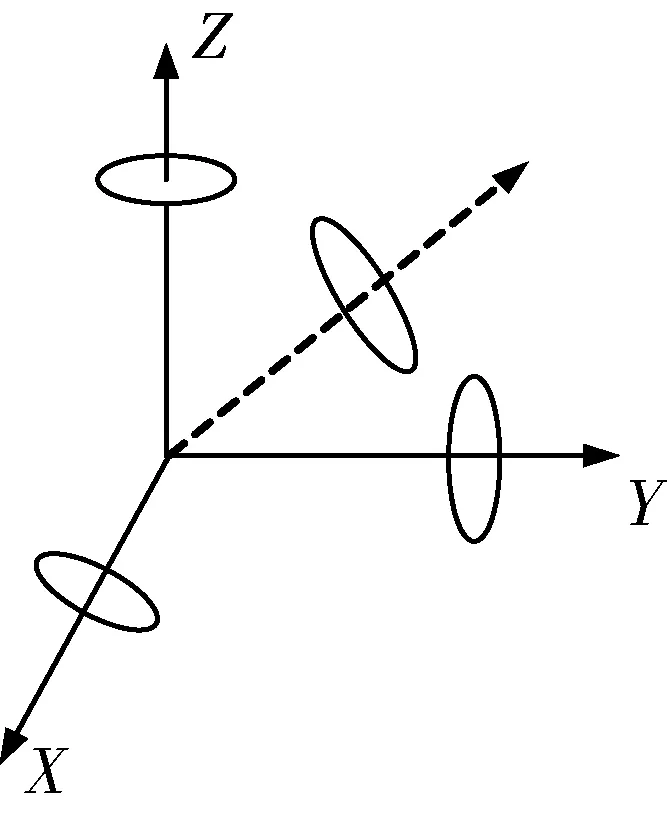
图3 常见执行器配置方案
图3是1个由4飞轮构成的执行器,XYZ轴是正装轴,虚线轴表示斜装轴(该轴的3个欧拉角在0°到90°之间)。由图可知,飞轮的安装方式有正装和斜装。所谓的正装是指与空间的一个面相平行的安装方式,显而易见,斜装是与3个平面都不平行的安装方式。这2种方式对系统可重构性影响是不同的,在进行可重构性指标分配时应加以区分。陀螺与飞轮相似,也有2种安装方式。然而,控制器与它们不同,这里所考虑的控制器是一个整体,换言之,组成控制器的单一元件就是它本身。不同控制器之间只采用并联的安装方式。
为了区分同一部件不同的安装方式,用阶段p表示不同安装方式的部件,p=1,2,3,4,5分别表示控制器、正装飞轮、斜装飞轮、正装陀螺和斜装陀螺。这样表示可以区别不同安装方式的差别,并不影响分配结果。
对于一个由p个阶段串联组成的系统,基于启发式算法的可重构性指标再分配流程如图4所示。
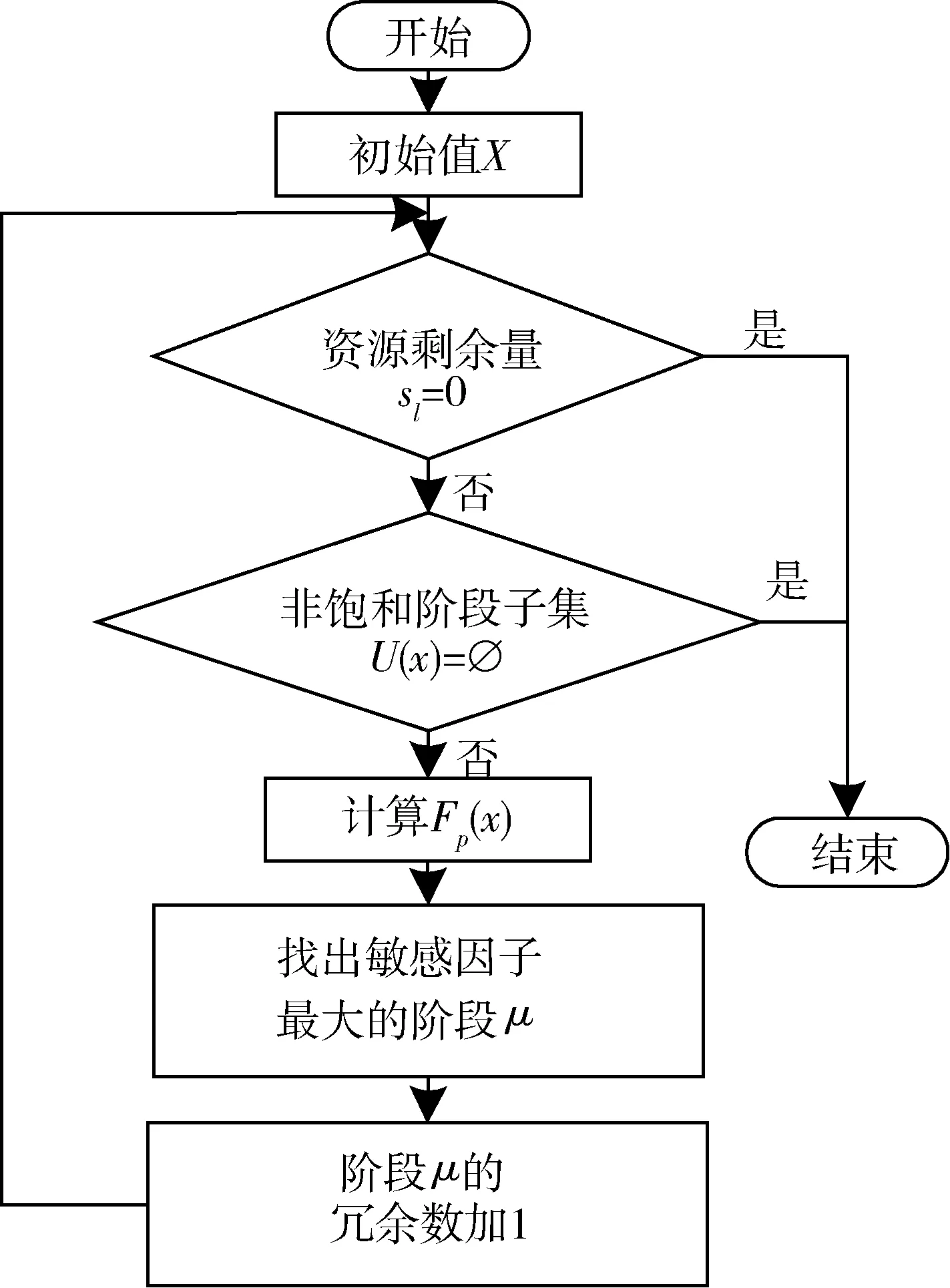
图4 基于启发式算法的可重构性指标分配流程图
下面结合卫星姿态控制系统,将基于启发式算法的可重构性指标再分配方法详细阐述如下:
步骤0:为卫星姿态控制系统找到一个可行解x=(x1,x2,x3,x4,x5),向量中变量分别表示控制器、正装飞轮、斜装飞轮、正装陀螺和斜装陀螺的个数;
步骤2:令xμ=xμ+1,然后回到步骤1;
步骤3:求出的x即是卫星姿态控制系统的最优化解,计算结束。
其中,第p个阶段的敏感因子为:
Fp(x)=[Rk(xp+1)-Rk(xp)]
(14)
注:在以往有约束条件的指标分配方法中,直接寻查法[17]计算量少并且能获得接近系统最优值的解,所以应用广泛,是最具有代表性的一种。为了验证所提启发式算法解决可重构性指标分配问题的有效性,将直接寻查法用于可重构性指标再分配,并将2种方法的分配结果作对比。基于直接寻查法的卫星姿态控制系统可重构性指标再分配的思路是:每次在系统中二重可重构度最小的一级上加入一个冗余单元,并检查约束条件。在约束条件允许范围内,通过一些列试探,可以使系统二重可重构度接近最大值,这是一种近似最优解。
约束条件为:sl≠0,l=1,2,3,其中,sl表示第l种资源剩余量。
3 卫星姿态控制系统算例仿真
如前文所述,卫星姿态控制系统是由控制器、执行器和传感器等3部分组成的。本章将第2节中所提的可重构性指标分配方法用于卫星姿态控制系统进行仿真计算。
给定卫星姿态控制系统可重构度目标值:二重可重构度R1=0.8,该目标值是自己选取的,在实际系统的可重构性设计中,目标值是客户/设计人员根据实际的任务需要设定的。部件基本属性值:
(W1,W2,W3,W4,W5)=(1.5, 2.5, 2.5, 2, 2)
(C1,C2,C3,C4,C5)=(2, 3, 3, 1.5, 1.5)
(E1,E2,E3,E4,E5)=(3, 0.5, 1.5, 1, 2)
其中,W表示部件重量,C表示部件成本,E表示部件能耗。约束条件:b1=26,b2=30,b3=25。要求卫星姿态控制系统实现二重故障重构时,不欠驱动。
3.1 可重构性指标初次分配
首先用模糊综合评价法将卫星姿态控制系统的二重可重构度目标值分配到分系统。
1)由2.1节可写出因素集U、因素评价Vi和分值集C:
U={重量,经济,能耗,可靠性,控制精度,
故障可诊断性,重构风险性},
Vi={低,较低,一般,较高,高},C={1,2,4,8,16}。
2)确定因素的权值以及因素的隶属值。由专家给出可重构性指标因素之间的重要关系,如表3所示。由表3直接写出判断矩阵:
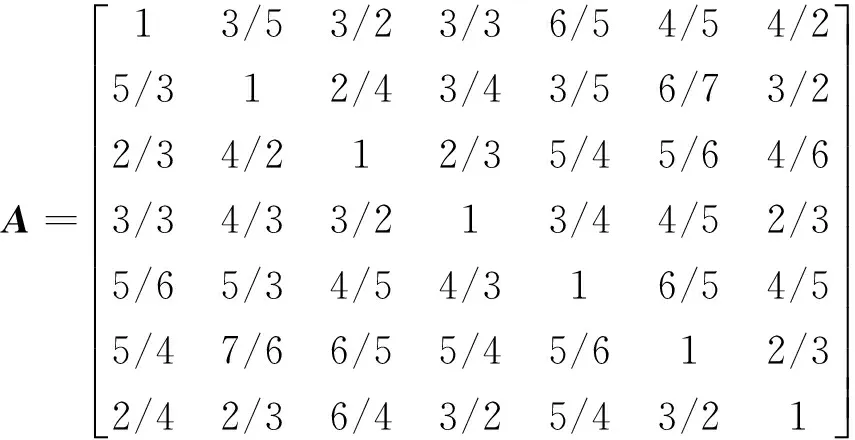
表3 可重构性指标因素之间的重要关系
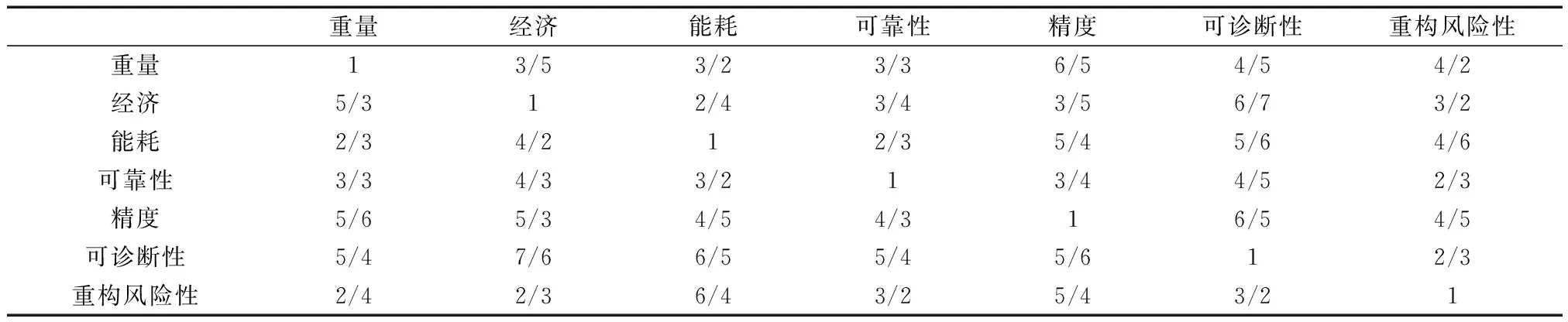
重量经济能耗可靠性精度可诊断性重构风险性重量13/53/23/36/54/54/2经济5/312/43/43/56/73/2能耗2/34/212/35/45/64/6可靠性3/34/33/213/44/52/3精度5/65/34/54/316/54/5可诊断性5/47/66/55/45/612/3重构风险性2/42/36/43/25/43/21
通过2.1节,计算可得可重构性指标各因素的权重矩阵为:
W=[0.1542 0.1285 0.1331 0.1381 0.1499 0.1466 0.1497]。
给出卫星姿态控制系统的控制器、执行器和传感器的评价矩阵分别为:
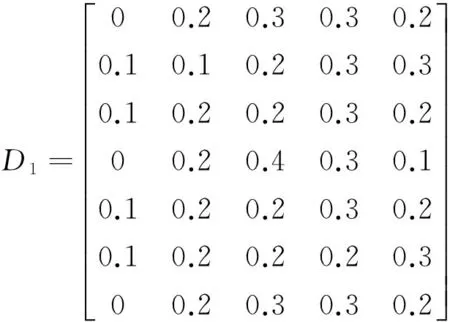
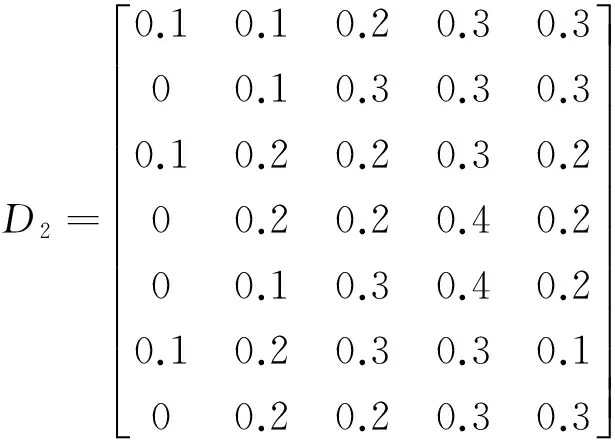
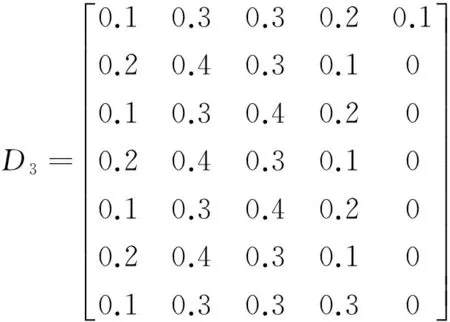
通过2.1节步骤,运算可得卫星姿态控制系统的控制器、执行器和传感器的最小二重可重构度为:
=0.3069,R2=0.3263,R3=0.1669。
由上述结果可以看出,初次分配得到3个不相同的分系统二重可重构度,体现了不同分系统在重构任务中不同的重要性。
3.2 可重构性指标再分配
卫星需要控制3个方向的姿态,而一个飞轮在不欠驱动的情况下,只能控制1个方向,所以至少需要3个飞轮。陀螺与飞轮原理相同,至少需要3个陀螺才能不欠驱动。
根据2.2节,直接写出系统5个阶段的最低配置为x=(1,3,0,3,0)。相应地,资源剩余量s1=13,s2=14.5,s3=12.5。

当p∈U(x),[Rk(xp+1)-Rk(xp)]的值:


因此,α=0.5时所有非饱和分系统的敏感因子为:F1(x)=1.0417,F2(x)=1.1250,F3(x)=2.2500,F4(x)=1.3333,F5(x)=2.6667。
由于F5为最大的敏感因子,所以对传感器增加1个斜装陀螺,对于α=0.5的其它迭代结果由表4给出。
当α=0.5,通过新的启发式算法得到系统最优配置是(3,3,2,4,1)。相应的配置如图5所示。
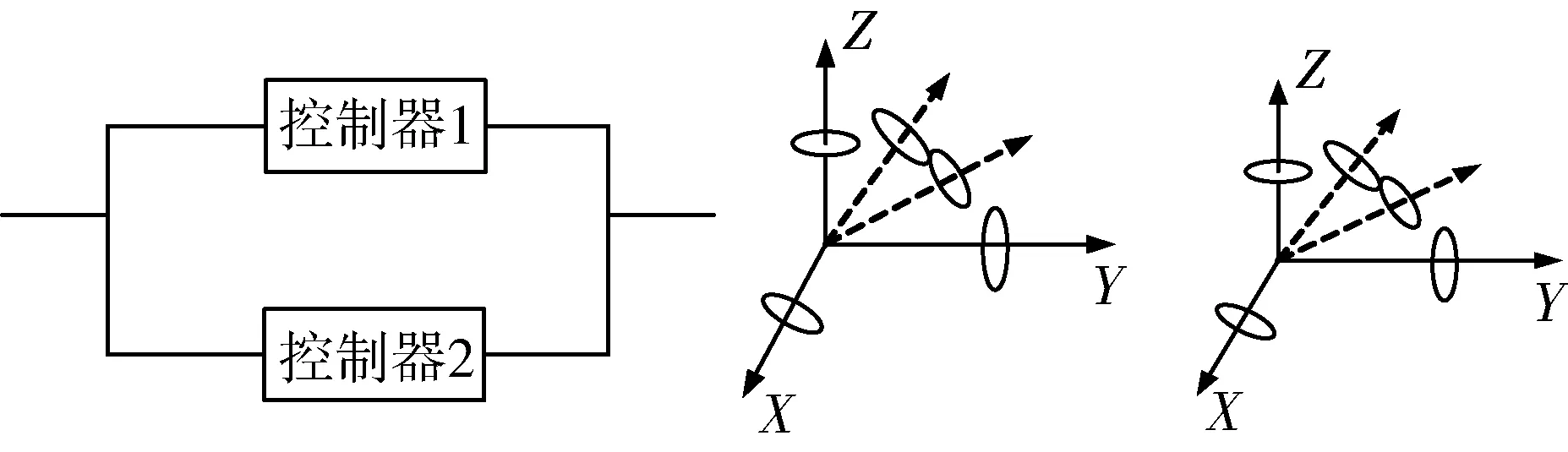
图5 控制器、执行器和传感器配置方案
验证分配结果的有效性:

从分配结果看出,该配置方案的二重可重构度R*=1,大于系统的目标值0.8,且各分系统的二重可重构度大于初次分配的最小二重可重构度,表明方案能够满足系统的可重构性要求。
(表4中* 表示敏感因子的最大值;b 表示饱和阶段。)
注:该实例中,基于直接寻查法的可重构性指标再分配的计算步骤为:首先取初始解为x=(1,3,0,3,0),计算3个分系统的二重可重构度:R1=0,R2=0,R3=0。由于这3个分系统的二重可重构度相等,所以依据直接寻查法的思想,对任何分系统增加冗余部件都是一样的,这里首先选择增加1个控制器。此时:s1=11.5,s2=12.5,s3=9.5,重复这个步骤,可以发现3个分系统二重可重构度相等,选择增加1个控制器,s1=10,s2=10.5,s3=6.5,继续上述过程,当s1=1,s2=1.5,s3=1.5时,增加任何一个分系统的部件都会超出资源剩余量,计算结束,得到系统最优配置为x=(3,4,1,4,1)。
从上述分配过程可以看到,直接寻查法能够满足系统指标分配基本要求,但是所得系统二重可重构度小于所提启发式算法的结果。原因在于直接寻查法在考虑可重构度增量时,并没有考虑资源的最优化,而所提启发式算法的敏感因子包含了部件的资源消耗与剩余资源的关系,通过这个环节,可以使得资源利用最大化,并最终在约束条件内获得二重可重构度最大的配置,这就显示了新的启发式算法的优越性。
4 结束语
针对卫星姿态控制系统的可重构性指标分配问题,将系统分配过程分为初次分配和再分配,利用模糊综合评价法进行可重构性指标的初次分配,很好地解决了卫星姿态控制系统可重构性数据统计不足的特点,并根据专家评分等方法给各分系统分配不同的最小可重构度,从而得到与重构重要性相符的初次分配结果。启发式方法用于卫星姿态控制系统的可重构性指标再分配,能有效地处理串联系统冗余分配的问题,通过比较不同方案的敏感因子,得到满足系统可重构度的配置方案,相比于直接寻查法,它能更好地优化配置系统的资源,同时它的计算量较少,在实际工程领域具有一定的应用价值。
[1] Cyrus D Jilla,David W Miller. Satellite Design: Past, Present and Future[J]. International Journal of Small Satellite Engineering,12 February 1997:234-240.
[2] 罗晓平, 黄海.自适应结构控制及其空间应用[J]. 航天控制,2005,23(2):47-53.(LUO Xiaoping, HUANG Hai. Adaptive Structural Control and Its Applications in Space[J].Aerospace Control, 2005, 23(2): 47-53.)
[3] Sharma R, Tewari A. Optimal Nonlinear Tracking of Spacecraft Attitude Maneuvers[J]. IEEE Transactions on Control Systems Technology, 2004, 12(5): 677-682.
[4] Dalsmo M, Egeland O. State Feedback H∞ Suboptimal Control of a Rigid Spacecraft[J]. IEEE Transactions on Automatic Control, 1997, 42(8): 1186-1191.
[5] 孙德波, 段广仁, 王爱华.飞行器视觉导航的 H∞ 滤波[J].航天控制, 2005, 23(3): 4-8.(SUN Debo, DUAN Guangren, WANG Aihua. The H∞ Filter forAerocraft Vision Navigation[J]. Aerospace Control, 2005, 23(3) : 4-8.)
[6] Hu Q L. Robust Adaptive Sliding Mode Attitude Maneuvering and Vibration Damping of Three-axis-stabilized Flexible Spacecraft with Actuator Saturation Limits[J].Nonlinear Dynamics, 2009, 55(4): 301-321.
[7] Hao Yang,Bin Jiang, Marcel Staroswiecki.Fault Recoverability Analysis of Switched Systems[J].International Journal of Systems Science, 2012, 43(3), 535- 542 .
[8] 王骏, 陈欣, 杨浩.基于神经网络与自适应控制的系统重构方法[J].航天控制,2006, 24(2): 9-13.(WANG Jun, CHEN Xin, YANG Hao. A Method of System Reconfiguration Based on Neural Network and Adaptive Control[J]. Aerospace Control, 2006, 24(2): 9-13.)
[9] 李培根,张洁.敏捷化智能制造系统的重构与控制[M].北京:机械工业出版社,2003.(Li Peigen, Zhang Jie. Reconstruction and Control of Agile Intelligent Manufacturing Systems[M]. Beijing: Mechanical Industry Press, 2003.)
[10] Staroswiecki M. On Reconfigurability with Respect to Actuator Failures[C]. Proceedings of the 15th Triennial World Congress, IFAC 2002, Barcelona, Spain. 2002: 775-780 .
[11] 李士勇.工程模糊数学及应用[M].哈尔滨:哈尔滨工业大学出版社,2004.(Li Shiyong.Engineering Fuzzy Mathematics and Application[M]. Harbin: Harbin Institute of Technology Press, 2004.)
[12] Zhen Y, Hua W, Li Z L, et al. Researching the Comprehensive Use of Fuzzy Comprehensive Evaluation and Markov Chain[C]. IEEE International Symposium on Medicine & Education, 2009, 1: 476-479.
[13] Sharma J, Venkateswaran K V. A Direct Method for Maximizing the System Reliability[J]. IEEE Transactions on Reliability, 1971, 20(4): 256-259.
[14] Saaty T L. Analytic Hierarchy Process[J]. Encyclopedia of Biostatistics, 2005.
[15] Aggarwal K K. Redundancy Optimization in General Systems[J]. Reliability, IEEE Transactions on 1976, 25(5): 330-332.
[16] Nakagawa Y, Nakashima K. A Heuristic Method for Determining Optimal Reliability Allocation[J]. IEEE Transactions on Reliability, 1977, 26(3): 156-161.
[17] Chen C L, Chen N. Direct Search Method for Solving Economic Dispatch Problem Considering Transmission Capacity Constraints[J]. Power Systems, IEEE Transactions on, 2001, 16(4): 764-769.
Reconfigurable Allocation of Satellite Attitude Control System
XIANG Changyi1YANG Hao1CHEN Yuehua2JIANG Bin1LIU Chengrui3,4
1. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 2. Academy of Frontier Science, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China 3. Beijing Institute of Control Engineering, Beijing 200233, China 4. Science and Technology on Space Intelligent Control Laboratory, Beijing 200233, China
Areconfigurableallocationwithconstraintsforthesatelliteattitudecontrolsystem,ispresentedinthepaper.Thisallocationcanbedividedintoprimaryandsecondaryallocationaccordingtothefeatureofreconfigurabilitydatadeficiencyandtherequirementsofresourceoptimization.Theprimaryallocationbasedonfuzzycomprehensiveevaluationmethodisproposedinviewoftheuncertaintyofindicatorsandambiguityofhumanknowledge.Thesimulationresultsshowtheeffectivenessandfeasibilityoftheproposedmethod.Aimedatapproachingtheoptimalsolution,anewheuristicalgorithmisproposed.Thenthesecondaryallocationofthesystemuseboththenewheuristicalgorithmandthedirectsearchmethod.Thesimulationresultsshowthattheformermethodismuchmoreeffectivewithlowcomputationloadsandaccurateresults.
Reconfigurableallocation;Satelliteattitudecontrolsystem;Fuzzycomprehensiveevaluationmethod;Heuristicalgorithm
*国家自然科学基金(61203091,61104116,61273171);上海航天科技创新基金(SAST201234);中央高校基本科研业务费专项资金 (NS2012069)
2013-03-12
项昌毅(1988-),男,江西人,硕士研究生,主要研究方向为故障诊断与容错控制;杨 浩(1982-),男,江苏人,副教授,主要研究方向为故障诊断与容错控制;程月华(1977-),女,安徽人,副研究员,主要研究方向为小卫星姿态控制、故障诊断与容错控制;姜 斌(1966-),男,江西人,教授,博士研究生导师,主要研究方向为故障诊断与容错控制;刘成瑞(1987-),男,河北人,高级工程师,主要研究方向为航天器故障诊断与可靠性研究。
TP277; V448.22
A
1006-3242(2014)02-0046-07
猜你喜欢
摄影世界(2022年1期)2022-01-21
装备制造技术(2021年1期)2021-05-21
知识经济·中国直销(2018年12期)2018-12-29
制造技术与机床(2018年9期)2018-09-19
自动化学报(2018年2期)2018-04-12
商周刊(2017年6期)2017-08-22
海外华文教育(2017年6期)2017-08-07
山东大学法律评论(2016年0期)2016-08-16
水电站机电技术(2016年1期)2016-02-28
北京航空航天大学学报(2016年3期)2016-02-27
