
智能肢体康复训练器设计
2014-09-04 00:57朱仰博张邦成关博文陈玉超
长春工业大学学报 2014年5期
张 冰, 朱仰博, 张邦成, 关博文,陈玉超, 何 猛, 谢 涵
(长春工业大学 机电工程学院, 吉林 长春 130012)
智能肢体康复训练器设计
张 冰, 朱仰博, 张邦成*, 关博文,陈玉超, 何 猛, 谢 涵
(长春工业大学 机电工程学院, 吉林 长春 130012)
基于STM32系列芯片控制系统实时检测腿部力量的大小,实现了上下肢功能障碍者训练时从被动到主动的自由转换,增加了训练系统的柔顺性。控制系统通过检测剩余力量自动调整力矩,使训练更加智能化。实验结果表明,设计开发的智能上下肢康复训练器,重力检测精度为0.6 N,速度控制误差δ<2%。
智能; 肢体; 康复; 训练器
0 引 言
对于上下肢功能障碍者的康复,医学上通常是通过进行重复的特定任务训练,让患者进行足够的重复性活动,以此增强腿部肌肉和提高关节灵活性,基于这种方法的训练已取得良好的临床效果[1-3]。康复训练器作为医疗机器人的一个重要分支,已经成为国际机器人领域的一个研究热点。康复训练设备大致可以分为两类,一类是借助于跑步机、悬吊带等帮助患者进行上下肢运动训练,例如瑞士的LOKOMAT步行康复训练机器人;另一类是卧式伸曲腿,利用电机或气囊型人造肌肉作为驱动装置,通过电机轴的旋转或使气囊充、放气实现上下肢的弯曲或伸长,例如布鲁塞尔Vrije大学研发的ALTACRO康复训练器。
国内的研究者也是使用悬吊步行式,例如清华大学研制的关节直接驱动方式康复训练器;哈尔滨工业大学研制的卧式康复训练机器人。悬吊式训练康复器虽然结构简单、价格便宜,但训练过程中必须有专业人员帮助,而且随意性较强,不符合人体的运动机理,只能用于病情较轻的患者。卧式训练康复器的设计虽然更接近人腿真实的运动形式,具有输出力大、有一定柔度等优点,但是其穿戴复杂,没有减重措施,对于病情较为严重的患者此方法实现难度较大。因此,文中设计了一种基于STM32系列控制芯片的踏车式康复训练器,训练系统智能灵活、柔性度高、便于上下肢功能障碍者康复训练。
1 上下肢康复训练器工作原理
上下肢康复训练器分两部分:一部分是训练上肢康复;另一部分是训练下肢康复。除上肢与下肢的力矩不同、设计尺寸不同外,上肢与下肢的训练方法和方式一样。文中以下肢康复为例作详细分解。
利用安装在支架上的脚蹬,将腿部的力量通过曲柄传递给中轴,在中轴上增加了惯性轮,利用惯性轮具有保持动能的特性,能够使系统旋转时保持一定的转动力矩,克服了主被动转换时旋转速度产生的波动,使运动更加稳定[4]。在中心轴上安装一对齿轮,减速比为50∶1,小齿轮的中心轴上一端经联轴器与直流无刷电机相连,一端经联轴器与中空旋转型磁粉制动器相连。当上位机STM32控制器通过压力传感器和编码器检测到训练者腿部的力矩不足以驱动曲柄旋转时,控制系统启动直流无刷电机,驱动输出轴带动小齿轮旋转,经减速器后,带动中轴旋转,由脚蹬带动脚部和腿部运动,从而达到带动使用者训练效果。当使用者的力量有剩余时,曲柄的转动速度会加快,编码器检测到速度信号,并反馈至上位机,上位机则根据反馈信号速度的大小,控制中空旋转型磁粉制动器的电压,使中空旋转型磁粉制动器产生一定的反向力矩,克服使用者剩余的力量,使曲柄的转速始终保持一个定值。实时检测系统由压力传感器和编码器组成,将脚部的力矩和中轴旋转的速度反馈给上位机STM32控制器,构成双闭环控制[5]。控制精度高,系统响应速度快。上下肢康复训练器结构设计如图1所示。
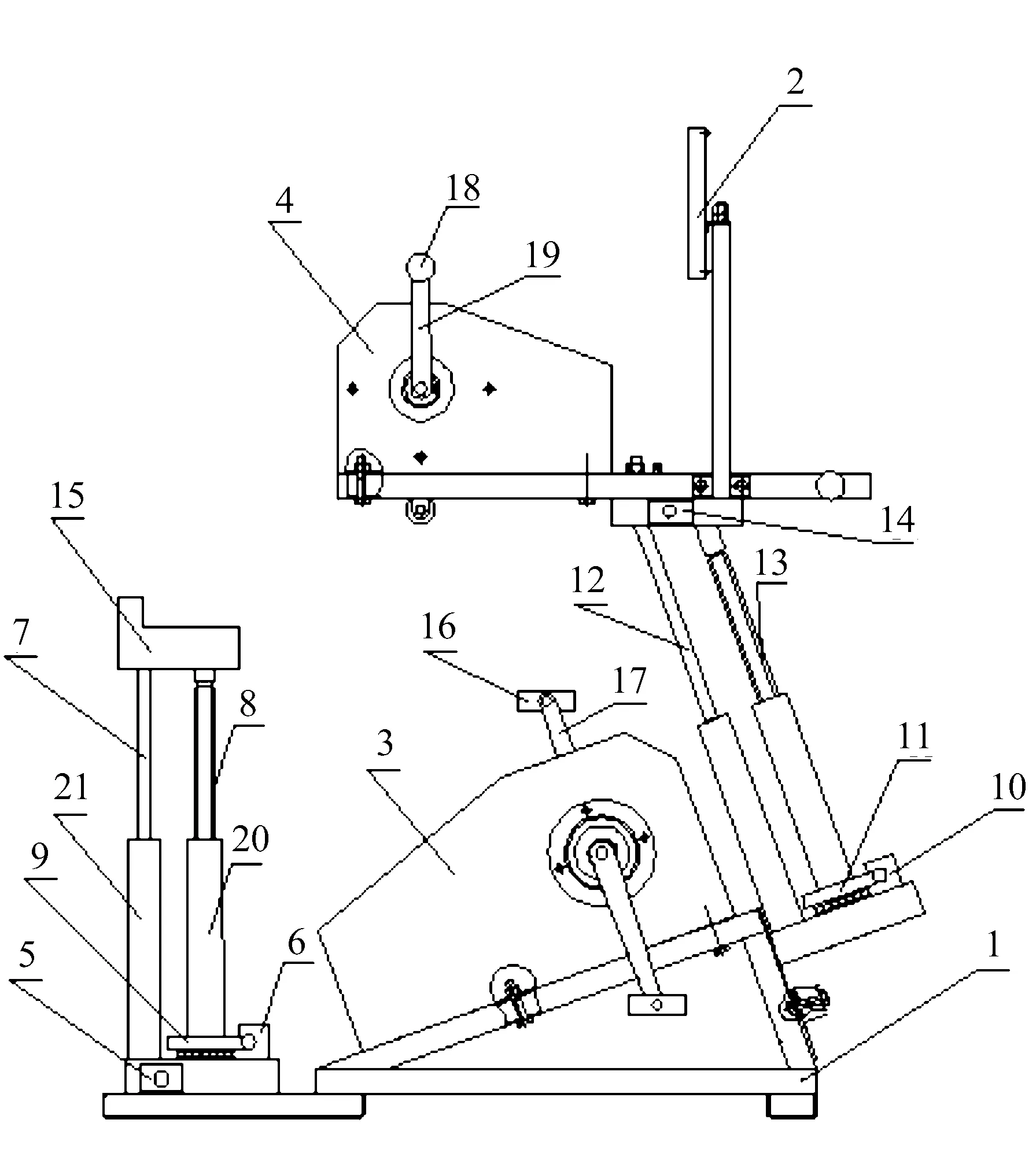
1.支架; 2.触摸屏; 3.下肢训练模块; 4.上肢训练模块;5.微调电机1; 6.微调电机2; 7.光杠; 8.丝杠; 9.蜗轮蜗杆;10.微调电机3; 11.蜗轮蜗杆; 12.光杠; 13.丝杠; 14.微调电机5;15.座椅; 16.脚蹬; 17.曲柄1; 18.把手; 19.曲柄2
2 位置调节结构设计
由于上下肢功能障碍者的身高不同,设计智能康复训练器要尽可能地满足所有的使用者。因此,在设计时,以下肢康复训练模块与支架固定为原则,调节座椅和上肢康复训练模块,使智能康复训练器满足使用者的要求。在图1中,使用者坐在座椅上,将脚放在脚蹬上,先打开被动模式,脚蹬带动使用者的脚部和腿部运动。使用者可以根据自己的身高和曲柄旋转时腿部的弯曲情况调节微调电机,微调电机的功能是带动座椅前后移动。同时,也可以调节微调电机,使座椅上下移动,直到调节至最佳位置。
座椅上下调节的原理是利用丝杠旋转使螺母产生位移的原理。在智能上下肢康复训练器的结构设计中,将螺母的位置固定,只有一个旋转自由度,螺母下方放置一个端面轴承,为了防止在使用过程中螺母发生偏转,在底座上加工一个圆形凸台,保证了螺母X,Y,Z方向的位置不变。座椅的可调范围就是螺母的长度,根据人体功能学设计,螺母长0.5 m,即可满足使用者的调节需求。位置调节时,微调电机带动蜗杆转动,由蜗杆将动力传递给蜗轮,蜗轮通过键连接与螺母连接在一起,蜗轮与螺母一起旋转,蜗轮蜗杆的减速比为1∶20,增大了传动力矩,螺柱选择是锯齿形螺纹,传动效率高,且具有自锁功能,同时,蜗轮蜗杆减速系统也具有自锁功能,能够保障座椅调整机构运行的安全性。由于螺母上下移动的位置被固定了,同时,为了克服座椅跟随螺母旋转的力矩,增加了光杠,保证座椅的位置固定,增加了系统的稳定性。同样的,上肢康复训练模块的上下位置调节也是采用蜗轮蜗杆调节,由于上肢训练模块重量较下肢训练模块轻,因此上肢训练模块前后位置调节通过微调电机直接驱动即可,驱动方式采用齿轮齿条式。
3 系统总体硬件设计
智能上下肢康复训练器控制系统的硬件主要由STM32F103系列控制芯片、可编程智能TFT LCD,J3806系列绝对式编码器、直流无刷电机、中空旋转型磁粉制动器等模块组成。布置在曲柄旋转轴上的绝对式编码器和脚蹬上的压力传感器作为系统的检测部分,将曲柄旋转的速度和脚蹬的力矩传送至控制芯片[6],控制芯片向直流无刷电机和制动器的驱动电路发送控制信号,由直流无刷电机驱动曲柄旋转或者由制动器抑制曲柄旋转。控制系统如图2所示。

图2 控制系统示意图
系统以STM32控制芯片作为控制核心,力矩传感器检测到脚蹬上的力,以电压值形式输出,STM32控制芯片通过3次数据采样取均值后得到更加精确的数据。由于使用者的体重不同,使用者在使用康复训练器时,先将训练器运行在被动模式下,此时使用者不要用力踩脚蹬,只是将脚放在脚蹬上即可,由曲柄带动使用者的腿部和脚部运动,被动旋转两圈,由控制系统采集脚蹬上的力,作为在以后训练时腿部力量的判断,并为腿部是否痉挛提供依据。当腿部痉挛时,腿部的肌肉发生错乱,使腿部的肢体僵硬,从而使脚踩在脚蹬上的力发生突变,STM32控制芯片检测的信号发生突变时,就会发出报警信号,提醒医护人员做防护工作。
3.1传感器选择
根据系统检测精度要求及传感器性能比较,压力传感器选用高精度、输出量程广的BMP085压力传感器,精度控制误差小于3 Pa。输出方式为I2C接口,便于与STM32控制芯片通讯,供电电源在1.8~3.6 V,功耗较低,适应性强,与STM32控制芯片的供电电压相同。BMP085是一种高精度气压传感器。BMP085是基于EMC鲁棒性、精度高、线性度以及长期稳定的技术压阻式传感器,可以直接连接到一个微控制器,反应时间只有7.5 ms。
3.2控制芯片的选择
通过搜集相关芯片资料,也同时对小面积的AVR单片机和51单片机进行了大致的比较,以CortexM3为内核的STM32,比LPC2148芯片拥有更丰富和灵活的外设,按照MIPS值计算,STM32系列芯片的性能几乎是LPC2148的两倍[7]。在核心1.8 V供电情况下,与DSP2811相比较,135 MHz×1 MIPS。现在用STM32F103,72 MHz×1.25 MIPS,性能是DSP的66%,STM32F103R型(64管脚)芯片面积只有2811芯片的51%,STM32F103C型(48管脚)面积是2811芯片的25%,最大功耗是DSP的20%,单片价格是DSP的30%,且有更多的串口,CAP和PWM。高端型号有SDIO,理论上比SPI速度快。
4 软件设计
4.1数字滤波
滤波方法有硬件滤波和软件滤波。硬件滤波主要是通过电容电阻组合电路滤波,不适合用于信号快速变化的场合[8],对采集的信号有一定的抑制作用,且很容易滤掉有用的信号,因此采用软件滤波方法。
常用的数字滤波方法有中位值法、惯性滤波法和平均值法。中位值滤波法对变化缓慢的信号进行滤波有较好的效果,如温度、液位的变化,不宜对流量、速度等变化快速的量进行滤波。惯性滤波运算量大,占用内存大,不适合快速采样与响应的系统。平均值法简单,运算速度快,能够对具有随机干扰的信号进行滤波,在保证采样精度的同时节省系统调节时间。因此,信号采样采用平均值法滤波,选择采样次数为N=3。
4.2控制流程图
软件设计流程如图4所示。

图4 控制流程
控制电路上电后,对检测电路和驱动电路进行初始化,然后读取压力传感器输出的电压值,进行3次采样后,用平均值法得到3个轴的值与被动测试时的压力值分别比较,如果相等或大于,且大于的数值波动不大,即无突变,则说明此时的压力处于正常状态;如果小于或压力值有突变,则表明训练者的腿部出现痉挛或者机械系统出现故障,此时,应停止旋转,并报警提示医护人员。
5 实验结果与分析
实验测试时,使用者将脚放在脚蹬上,打开被动模式进行采集,在使用者不加力的情况下,得到腿部重力为50.3 N,中轴设定转速为6 r/min,以此为判断主被动模式标准。在测试时,使用者随机地使用脚力,测得压力检测与转速关系,见表1。

表1 转速、工作模式与压力关系
由表1可看出,转速实际值偏离理论值的误差在2%之内,且重复性好,满足使用精度。
系统响应时间测试时,传感器通过使用者将检测到的压力模拟量给STM32控制芯片,控制芯片计算出驱动电机所需的脉冲占空比,并发送给驱动模块、驱动电机。从脚蹬的压力变化到制动器将速度保持设定值为止,记录所用的时间,反复调整,使整个过程响应在1 s之内。在STM32控制芯片处理数据中,读取压力值转换的数据,转换时间为65 μs,制动器响应时间为50 ms,相对于1 s的运行周期可以忽略不计,影响系统响应时间的是STM32控制芯片向电机驱动芯片发送脉冲的频率与机械调整机构所需要的传动时间。实验结果表明,发送脉冲频率大于8 kHz时,电动座椅椅面平衡控制系统响应周期时间t<1 s。
6 结 语
以STM32控制芯片为主控芯片,内置A/D转换器能够对压力传感器进行直接、实时采样,并进行多次采样取均值,能够有效地提高控制精度。直流无刷电机驱动模块是采用24 V低电压,输出电流峰值高达4 A的高电流供电,能够为康复训练器提供1 kN的力矩。系统响应速度快,能够快速地调整电机的转速和制动器的工作电压,其压力误差δ<0.6 N,速度控制误差δ<2%,能够满足康复训练器压力检测和速度调节的要求。实际应用结果表明,所设计的上下肢康复训练器达到了使用要求,增强了训练效果。
[1] 陈仲武.我国现代康复医学事业的发展历程[J].中国康复理论与实践,2001,7(3):97-100.
[2] Werner G. Strength and conditioning techniques in the rehabilitation of sports injury [J]. Clinics in Sports Medicine,2010,29(1):177-191.
[3] Sampsell E. Rehabilitation of the spine following sports injury [J]. Clinics in Sports Medicine,2010,29(1):127-156.
[4] 杨俊友,白殿春,王硕玉,等.全方位轮式下肢康复训练机器人轨迹跟踪控制[J].机器人,2011,33(3):314-318.
[5] 闫茂德,吴青云,贺昱曜.非完整移动机器人的自适应滑模轨迹跟踪控制[J].系统仿真学报,2007,19(3):579-581.
[6] 张立杰,刘颖,黄真.平面2自由度驱动冗余并联机器人的输出速度分析[J].机械设计,2002(2):19-21.
[7] Richard Barnett, Larry O’Cull, Sarah Cox.嵌入式C编程与Atmel AVR[M].周俊杰,译.北京:清华大学出版社,2003.
[8] 窦海鹏.数字滤波语音信号除噪设计[J].长春工业大学学报:自然科学版,2013,34(6):663-667.
Intelligent limbs rehabilitation device design
ZHANG Bing, ZHU Yang-bo, ZHANG Bang-cheng*, GUAN Bo-wen,CHEN Yu-chao, HE Meng, XIE Han
(School of Mechatronic Engineering, Changchun University of Technology, Changchun 130012, China)
The STM32 based control system freely transforms the disorder rehabilitation from passive to active during the training time according to the real-time detections of leg strength so that the flexibility of training system was improved. The system can automatically adjust output torque by measuring the remained strength, so that the training was more intellectualized. The experimental results show that the designed device can meet the needs with gravity precision 0.6 N and speed control error less thanδ<2%.
intelligent; limbs; rehabilitation; device.
2014-06-20
吉林省发展和改革委员会基金资助项目(20B-00005000419)
张 冰(1989-),女,汉族,吉林敦化人,长春工业大学硕士研究生,主要从事机电检测与控制方向研究,E-mail:bingyanzhi@126.com. *联系人:张邦成(1972-),男,汉族,吉林敦化人,长春工业大学教授,博士,主要从事机电检测与控制方向研究,E-mail:zhangbangcheng@mail.ccut.edu.cn.
TP 272; TP 311.1
A
1674-1374(2014)05-0552-05
猜你喜欢
教练机(2022年4期)2022-03-13
昆明医科大学学报(2021年4期)2021-07-23
设备管理与维修(2019年22期)2019-12-19
新生代·上半月(2019年6期)2019-09-10
中国自行车(2018年7期)2018-08-14
中国学校体育(2018年5期)2018-05-14
新课程研究·教师教育(2017年3期)2017-05-26
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
油气田地面工程(2014年5期)2014-03-09
