阈值自适应CNN的彩色图像边缘提取
2014-09-12 11:17王平田袁胡锡鹏
计算机工程与应用 2014年21期
王平,田袁,胡锡鹏
1.重庆医科大学附属第一医院,重庆 400016
2.重庆大学计算机学院,重庆 400044
3.总参信息化部训练基地
阈值自适应CNN的彩色图像边缘提取
王平1,田袁2,胡锡鹏3
1.重庆医科大学附属第一医院,重庆 400016
2.重庆大学计算机学院,重庆 400044
3.总参信息化部训练基地
细胞神经网络用于彩色图像边缘提取已经有很多人做了研究。现有的大部分工作都根据经验选取固定阈值来设计CNN模板。但这种阈值的选取方法忽略了人眼最小分辨差具有自适应性的特点。在设计图像边缘提取CNN模板选取阈值时,引入人眼最小阈值差成果,设计出了一组阈值自适应的CNN模板,同时对设计的阈值自适应算法的稳定性进行详细的论证。该算法让检测出的边缘更加符合人眼的视觉特性。实验结果证明,该算法效果良好。
边缘提取;细胞神经网络;阈值;自适应
1 引言
图像中有价值的边界信息被称之为边缘。边缘包含了图像的重要信息。它是纹理特征提取、图像分割、形状特征提取等图像前期分析处理的重要基础,也是计算机视觉、模式识别等研究领域的重要基础。细胞神经网络[1](Cellular Neural Network,CNN)由于并行处理高速实时信号处理能力和局部互联便于硬件实现的特点在图像处理中得到了广泛的应用。
CNN在工程应用中主要动力学特性由链接权重即模板决定[2]。尽管CNN模板库中提供许多模板来解决一些问题[3-4],但在具体应用如:边缘提取中,模板库中的模板往往不能取得很好的效果。因此,基于CNN的图像边缘提取技术实际上是具体成了寻找CNN模板的算法研究。目前,有许多学者对边缘提取的CNN模板的算法进行了研究,并且取得了较好的效果。这些算法按照主要原理的不同,可以分为如下两类:基于分析方法设计[5-6],此类方法在CNN状态方程中加入一系列的局部约束条件,把每一个细胞的动力学特性具体化,让CNN在样本和理想值之间进行学习,从而得出能解决与样本类似问题的模板。用于学习的算法如:非线性矩阵不等式[7]、遗传算法[8]、蚁群算法[9]等。基于分析设计法的优点是:一次训练出的模板可以直接运用到类似的其他任务中,但算法本身容易造成训练出的模板对样本的过度拟合而缺乏推广性的难题。另一种算法是直接设计法:根据图像自身的特点如当前像素值,周围点像素值等情况设计模板,不需要依赖样本训练。文献[10-12]等对该类设计算法进行了研究,在衡量细胞之间变化的阈值上,文献中大多是根据经验采用固定的阈值作为衡量像素间变化。固定阈值的选取忽略了人眼的生物学特性,认为人眼能辨别颜色最小差值是固定不变的。而文献[13-14]研究表明人眼能感受的最小变化差是随环境的不同而不断变化的。所以直接设计方法选取一个合适阈值来界定其是否属于边缘点至关重要。
本文在设计CNN模板时,为了避免分析设计法中出现的过度拟合情况,采用直接设计法对模板设计,在设计过程中充分考虑人眼视觉的特性,引入人眼最小辨别差的函数作为阈值的选取,使提取出的边缘图像更加符合人类的视觉感知。
2 细胞神经网络结构介绍
1988年少蔡棠和杨林等结合神经网络和细胞自动机的优点,提出了细胞神经网络。
2.1 网络结构
细胞神经网络中的每一个神经元被称为一个细胞(cell),它是由一组线性和非线性的电路组成。细胞与周围相邻的细胞直接联系,细胞之间发生互联的距离称r。在一个二维的细胞神经网络中,有限个细胞排成M行和N列的M×N的CNN网络。细胞Cij代表第i行和第j列的细胞。这个细胞与周围直接发生互联的细胞的最远距离称为R[15]。一个4×4的CNN网络结构图如图1所示。

图1 一个4×4的CNN网络结构图
2.2 数学表达式
每个细胞的电路状态可以被一组线性和非线性的组合方程式表示。
CNN的状态方程如下:

A为反馈模板,B为控制模板,分别由(2r+1)2个元素组成。式(1)的动力学性质由模板A,B和偏移Z来决定。
CNN的输出函数图如图2所示。
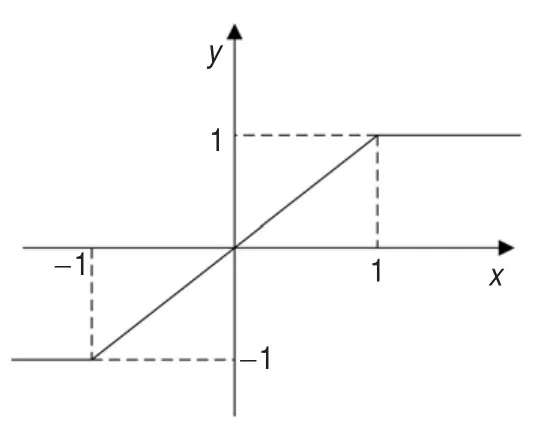
图2 CNN的输出函数图
3 自适应阈值
主观亮度是人眼视觉系统能感觉到的亮度研究,研究表明,对于人眼来说,当物体亮度I逐渐发生改变时,人眼起初是无法察觉这些变化的,当物体的亮度I变化大于特定值,即改变到I+ΔI时,人眼才能察觉物体亮度变化。称ΔI为辨别门限,即人类能辨别亮度发生变化必须达到辨别门限值。辨别门限ΔI的值并不是一成不变的,它在不同的亮度范围内的值是有差异的。
3.1 阈值函数
文献[14]给出如图3所示人眼视觉系统的亮度感知门限函数(Threshold Version Intensity,TVI)。分析杆状细胞(Rods)和锥状细胞(Cones)曲线后,发现在不同的亮度范围内,人眼恰能观察到的亮度阈值对数和亮度对数呈现出不同的函数关系。上述观察说明人眼对亮度变化是有比较强的自适应性。

图3 亮度感知门限函数图
文献[13]通过分析数学建模得出如下函数式:

其中r,g,b分别表示当前像素点的红色、绿色、蓝色分量值,Δr,Δg,Δb表示人眼在背景像素点值的条件下人眼能识别到的最小红色、绿色、蓝色差;从式(3)~式(5)不难看出,人眼在不同的背景下所能识别的最小色差是不同的,在不同的区间内存在不同函数对应关系。说明人眼在不同的背景环境下具有很强的自适应能力,这也可以解释在生活中,为什么从明亮的环境中进入暗环境中会有短暂的视觉盲区现象。边缘是像素之间发生突变的部位,它的衡量很大程度上取决于人眼的主观度量。
3.2 阈值合成
在RGB空间上色差发生变化的地方,由于背景像素的不同,人眼能识别的最小色差不一样。也可以说成是,在不同的背景环境下,人眼能够观察到的边缘也是不一样的。所以在边缘检测中,如果对整幅图片都采用同一个阈值显然不符合人眼的视觉特性,所以本文在接下来的模板设计的阈值处理中将引用上述最小色差函数,以便检测出更加精确的边缘符合人眼的视觉。视见函数[16]如表1所示。

表1 视见函数
根据三原色对成像贡献的不同,借助于三原色视见函数归一化后,RGB三维空间的阈值进行加权平均后得到如下定义:

4 算法设计及稳定性分析
通过第3章的讨论,已经得出了一组基于人眼视觉特性的自适应最小分辨阈值函数。本章在此基础上讨论算法的设计以及算法的稳定性。
定义一个影响半径为r=1的无耦合CNN系统,模板选取如下:

找到一个合理定义bk,l称为设计模板的关键。定义Δu表示中心细胞与周围细胞之间的差值。根据RGB三维对成像的影响程度不同,定义:

为了得到准确的定义,将边缘提取的任务抽象为如下形式:
全局任务:
给定:一个静态彩色图像P。

定理4.1如果式(7)中Z和式(8)中s满足式(9)和式(10),那么式(7)中定义的模板将能以稳定的状态完成输入图像的边缘检测任务。

[17]得出结论当A模板中的中心元素大于1,如:Ai,j>1;选中的状态将收敛在大于1的区域内。令a>1,得出如图4所示的CNN系统的状态动力学描述。

图4 CNN的状态方程图
分析CNN基本方程式(1)和输出方程式(2),当xi,j≥1,输出yi,j稳定地收敛于1,即当-1<xi,j<1,分为三种情况:

为了简化分析过程,令a=2,xi,j(0)=0。所以式(12)可以写成如下形式:


上面两种情况可简化写成:

到此分析完成。
定理4.2在非耦合CNN系统里,如果每个细胞的状态点都有xi,j(t)|>1,则有整个系统达到稳定状态。
证明观察式(11),当每个细胞的ωi,j确定后,每个细胞的动力学轨迹将独立于其他细胞。所以当每个细胞分别达到平衡点后,整个系统也就达到了平衡点。

利用定理4.1和定理4.2对CNN模板进行设计。首先,在输入图像之前对图像进行预处理计算出各个像素点的自适应性阈值,然后将各像素点的自适应性阈值用作CNN模板的判定值。最后将CNN模板输入到CNN动力学系统里。
将CNN模板输入到CNN动力学系统里。具体的步骤如下:
第一:对输入图像的每个像素分别提取出RGB三维的像素值。
第二:根据式(3)~式(5)分别计算出每个像素点在R、G、B三维分量上的最小色差值。
第三:根据式(6),将每个像素点pi,j在R、G、B分量上的最小色差值合成一个阈值Ti,j。
第四:根据Ti,j,按照式(8)设计出模板B。
第五:将初始值xi,j(0),偏移值zi,j输入CNN系统中。
第六:CNN系统中迭代,满足定理4.2,则终止迭代,输出边缘。
5 实验结果
根据上面的讨论,在式(9),式(10)的条件下,选择s=2,z=1,xi,j(0)=0。根据定理4.2,当所有细胞的状态方程满足|xi,j(t)|>1,认为整个系统收敛,算法停止迭代,把系统停止迭代后的输出结果作为边缘检测的结果。为了证明提出算法在边缘提取上的有效性,在Matlab7.0平台上进行仿真实验。
5.1 边缘效果对比
边缘检测的性能要求有如下几点:正确率高,精度高,边缘要细,尽可能少的漏检。为证明本文提出算法的有效性,采用经典的边缘算子Sobel和参考文献[11]中所提出算法做对比。图5(a)Lena为图像处理中常用的测试图片。图5(b)~(d)分别为本文提出自适应阈值CNN模板、Sobel算子、参考文献[11]检测出的边缘效果图。对比图5(b)、(c),可以看出,阈值自适应性CNN模板正确率和精确度上要优于经典算法Sobel,对比图5(b)、(d)可以看出阈值自适应性CNN模板相对参考文献[11]更加符合人眼视觉。图6(a)的几种检测结果中,图6(b)~(d)分别为本文提出自适应阈值CNN模板、Sobel算子、参考文献[11]检测出的边缘效果图。可以观察到,本文算法比其他经典算法检测出的效果要更连续,更清晰,更准确。图7(a)为边界不明确的复杂环境测试图片,对比图(b)~(d)可以看出阈值自适应CNN模板检测的效果好于Sobel和参考文献[11]。从边缘检测的效果看,阈值自适应CNN模板在彩色边缘提取相对Sobel和参考文献[11]所提出算法更能检测出物体之间边界不是很明确的边缘点。综上所述,阈值自适应性CNN模板检测效果更好且表现更稳定。

图5 Lena边缘检测效果对比图

图6 牵牛花边缘检测效果对比图
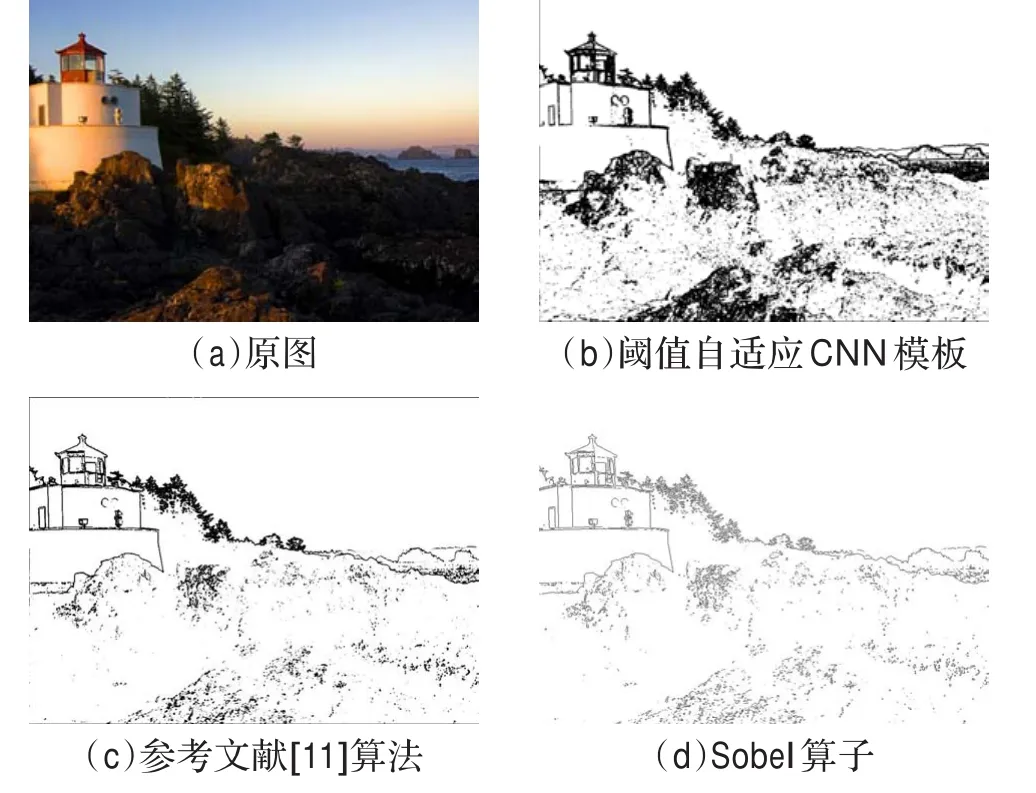
图7 灯塔边缘检测效果对比图
5.2 抗噪性测试

图8 加入噪声后检测结果

图9 加入噪声后检测结果
图5(a)、图6(a)、图7(a)加入噪声密度D=0.1的椒盐噪声。图8(a)、图9(a)、图10(a)分别是本文提出算法在噪声密度为0.1的椒盐噪声的实验结果图,图8(b)、图9(b)、图10(b)分别是Sobel算法在噪声密度为0.1椒盐噪声的实验结果图。

图10 加入噪声后检测结果
由以上对比图可以看出本文提出的算法具有较强的抗噪性,在抗噪性能上优于经典算子Sobel。
6 总结与展望
CNN高效实时并行处理的能力使它能够更好地运用到实时图像的处理中,本文利用CNN这一结构,将人眼最小色差辨别思维引入CNN的模板设计中,使检测出的边缘更加符合人体的视觉特性。实验结果证明该算法对边缘检测具有良好的效果且具有较强的抗噪性能。
参考文献:
[1]Chua L O,Yang L.Cellular neural networks:theory and applications[J].IEEE Trans on Circuits Syst,1988,35:1257-1272.
[2]Deng Shaojiang,Tian Yuan,Hu Xipeng.Application of new advanced CNN structure with adaptive thresholds to color edge detection[J].Communications in Nonlinear Science and Numerical Simulation,2012,17:1637-1648.
[3]Matsumoto T,Chua L O,Furukawa R.CNN cloning template:hole-filler[J].IEEE Transactions on Circuits and Systems,1990,37(5):635-638.
[4]Matsumoto T,Chua L O,Furukawa R.CNN cloning template:shadow detector[J].IEEE Transactions on Circuits and Systems,1990,37(8):1070-1073.
[5]Chua L O,Thiran P.An analytic method for designing simple cellular neural networks[J].IEEE Trans on Circuits System,1991,38(11):1332-1441.
[6]Martin H,Mosehytz G S.Cellular neural networks:analysis,design and optimization[M].Dordrecht:Kluwer Academic Publisher,2000.
[7]Li Huaqing,Liao Xiaofeng,Li Chuandong.Edge detection of noisy images based on cellular neural networks[J].Communications in Nonlinear Science and Numerical Simulation,2011,16(9):3746-3759.
[8]任鲁涌.一种基于遗传算法的细胞神经网络模板设计算法[J].山东工程学院学报,2001,15(4):48-52.
[9]Chandler B,Rekeezky C,Nishio Y,et al.A CNN template optimization by adaptive simulated annealing[C]//Proceedings 1996 International Symposium on Nonlinear Theory and Its Applications,Kochi,1996:445-448.
[10]张莹,王太勇,黄国,等.基于参数自适应CNN的灰度图像边缘检测[J].计算机工程与应用,2008,44(18):160-162.
[11]张闯,迟健男,张朝晖,等.一种基于CNN的彩色图像边缘检测算法[J].计算机工程与应用,2008,44(21):17-19.
[12]姜庆玲,刘万军.基于CNN模板的彩色图像边缘检测算法[J].计算机工程与科学,2009,31(5):42-45.
[13]张光玉,解梅.一种新的彩色图像边缘检测算法[J].电子科技大学学报,2005,34(2).
[14]Ferwerda J A.Element of early vision for computer graphics[J].IEEE Computer Graphics and Applications,2001,2l(5):22-33.
[15]Chua L O,Yang L.Cellular neural networks:applications[J]. IEEE Transactions on Circuits and Systems,1988,35(10):1273-1290.
[16]陈书海,傅录祥.实用数字图像处理[M].北京:科学出版社,2005.
[17]Crounse K R,Chua L O.Methods for image processing and pattern formation in cellular neural networks[J].IEEE Trans on Circuits and Networks,1995,42(10):583-601.
WANG Ping1,TIAN Yuan2,HU Xipeng3
1.The First Affiliated Hospital of Chongqing Medical University,Chongqing 400016,China
2.College of Computer Science,Chongqing University,Chongqing 400044,China
3.Training Base in Ministry of Information Technology,Headquarters of the General Staff,China
Color edge detection based on CNN has attracted many researches.Most existing works utilize fixed threshold based on experience to design CNN templates.However,this method ignores the fact that the human vision system has strong adaptability.Adaptive thresholds are brought into the progress of designing CNN templates,which consider high adaptability of human vision system.Meanwhile,the stability of this algorithm is comprehensively discussed.The algorithm is able to make detected edges be more acceptable by the human vision system.Performance evaluation results validate the efficiency of the proposed algorithm.
edge detection;cellular neural networks;threshold;adaptability
A
TP391
10.3778/j.issn.1002-8331.1401-0454
WANG Ping,TIAN Yuan,HU Xipeng.Color edge detection based on CNN with adaptive threshold.Computer Engineering and Applications,2014,50(21):189-194.
国家自然科学基金(No.61173178,No.60873201)。
王平(1987—),女,硕士研究生,研究领域为细胞神经网络;田袁(1986—),女,硕士研究生,研究领域为图像处理;胡锡鹏(1985—),男,硕士,研究领域为信息安全。E-mail:tianyuan@cqu.edu.cn
2014-01-28
2014-04-15
1002-8331(2014)21-0189-06
CNKI出版日期:2014-07-02,http://www.cnki.net/kcms/doi/10.3778/j.issn.1002-8331.1401-0454.html
猜你喜欢
快乐语文(2019年9期)2019-06-22
摄影之友(影像视觉)(2019年3期)2019-03-30
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
小天使·六年级语数英综合(2017年5期)2017-05-27
通信产业报(2016年44期)2017-03-13
优雅(2016年12期)2017-02-28
电影故事(2016年5期)2016-06-15
现代工业经济和信息化(2016年19期)2016-05-17
公民与法治(2016年23期)2016-05-17
雕塑(1999年2期)1999-06-28