捷联导引头中基于知识的目标分割方法研究
2014-09-15 04:39贾宏光
东北师大学报(自然科学版) 2014年3期
白 杨,崔 明,贾宏光
(中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
0 引言
随着成像传感器件的发展,CCD及红外探测器都拥有越来越高的分辨率,它在目标跟踪识别、高清成像等领域得到广泛的应用.为了降低成本,同时提高系统的可靠性,采用成像传感器件与弹体固连的形式,即捷联式导引头成为了研究热点[1-3].捷联式导引头通过大的视场来克服没有稳定平台带来的由弹体姿态改变及与目标相对运动引起的大相对位移的问题.通过大视场保证对目标的有效探测,就会带来成像场景复杂、处理数据量大及干扰多等问题,并且目标在识别阶段往往只有十几个甚至几个像素.需要一些有效的图像分割方法将感兴趣的区域正确地分割出来,达到降低处理难度、减少干扰和运算的目的.图像分割的关键是如何选取阈值来达到最优的分割结果.所谓最优的分割结果,就是将感兴趣的目标作为一个或几个连通区域与背景区分出来,拥有连续的轮廓[4].
常规图像分割方法都很难适合多变的场景,其中一个重要的原因是受到全局景象的干扰,目标容易淹没在背景中,尤其在目标尺寸相对较小时往往得不到正确的目标区域.随着面向图像对象分析方法的发展,将图像对象作为分析处理单元而不是图像像素,更适合对现实世界的知识认知[5-6].本文提出了一种基于知识的目标分割算法,将图像区域作为研究对象,提取疑似目标区域,加入特征提取环节,最后依据目标的先验知识对分割结果进行特征判定,同时对阈值进行修正,得到最终的阈值进而正确分割出目标区域.
1 问题分析
根据目标成像原理,各个目标与背景的对比度差异是目标可分割的依据.同时目标本身的成像特征也可以作为先验知识辅助完成对目标的分割,提高复杂场景对较小目标分割的正确率.分析了自适应阈值分割和基于边缘的分割方法的自身弱点,说明本文提出的分割方法的必要性.
1.1 目标成像
对于地面场景,假设场景中的景物均为漫反射体,则物体的光亮度为

式中:Et为目标的照度;ρ为目标的漫反射系数.
经过光学成像系统成像在CCD像面上的光照度为

则场景中各个目标的静态对比度为

1.2 自适应阈值分割
快速迭代是自适应阈值分割中常用的方法,假设图像中出现了2个主要灰度区域,以最大灰度和最小灰度的均值作为第一步近似.
快速迭代可以快速地对图像灰度进行分类,易受区域中两级灰度的影响,很难对全局复杂的场景做出正确阈值分割.但其在小区域灰度接近时,却有很好的分割效果.图1(a)为2个较理想情况下不同距离和场景时对远处2.3m×2.3m坦克的探测成像,图像分辨率为1024像素×768像素.图1(b)为自适应阈值分割结果,由图1可见,受全局景象的影响,无法得到正确的分割结果.
1.3 基于边缘的分割
在无法找到合适的阈值时,基于边缘检测的图像分割是常常采用的方法.基于边缘的分割标记出图像在灰度上不连续的位置.这样的不连续可以通过一阶导数和二阶导数检测到.一阶导数和二阶导数通过下面的公式得到:

基于边缘的分割最常见的问题是在没有边界的地方出现了边界、在实际存在边界的地方没有出现边界以及出现很多干扰边缘.复杂的场景中很难通过查找边界来确定目标位置.要找到正确的边缘,需要进行边缘合并而得到边缘轮廓.如果边缘检测结果和区域阈值分割结合起来,可以提供相对可靠的目标特征.图2给出了2个场景的边缘检测结果,边缘检测的结果可能会过于复杂或者被其他边缘干扰,很难正确区分出目标.

图1 自适应分割结果

图2 边缘检测结果
2 基于知识的目标分割
为了得到理想的分割结果,将一些先验的知识融合到处理中,而这些知识往往是简单而且也不难得到的.将相应的知识应用于基于知识的图像分割方法的3个部分,包括场景划分、特征提取和特征判定,目标知识应用在整个过程,隶属于数据驱动知识的控制方式[7],如图3所示.
基于知识的目标分割算法流程如图4所示.首先采用粗选阈值对图像进行场景划分,对划分后的场景进行特征提取,通过先验知识对区域特征进行判定,判断对应的分割结果是否含有正确的目标区域,如果含有目标区域且目标特征满足分割要求则目标分割结束,否则对阈值进行修正,重新进行场景划分及特征判定直到正确地分割出目标区域.特征判定采用级联式判定结构[8-9],前面一个判定为正的场景区域才会被送入后面的判定,反之则认为该场景区域不是要找的目标,全部判定为正的场景区域才被判定为目标.
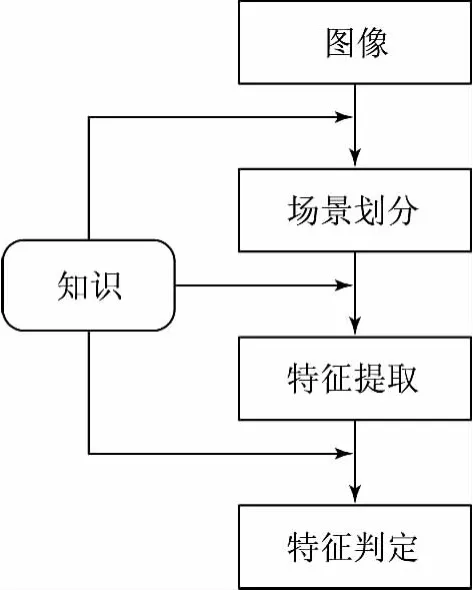
图3 模型驱动知识控制示意图

图4 基于知识的目标分割算法流程
2.1 阈值粗选及修正
设最佳阈值为tf,粗选阈值为t0,阈值修正是从t0到得到tf的过程,即对δt的求取.

最佳阈值并不是唯一的值,可以是一个区间内多个值,因为将目标与背景有效区分的值本身并不唯一.分割出的目标特征能够满足要求就认为找到了最佳阈值,停止算法.
δt可由调整速度和调整大小表示,有


2.2 场景划分及特征提取
分割后的图像R由m个不相交的区域Ri和一个背景组成.

其中:RB为背景为背景的补集,即为物体的集合.通过已知的一些信息可以对图像进行初步的阈值分割,信息可以是目标的亮度区间、灰度分布等.分割后的图像就可以进行初步的划分,对一幅图像的区域划分后的结果是与原图像对应的大小相等的矩阵,其中对应的每个像素为一个标号值,属于同一个连通区域的像素具有相同的标号值.这个标号值矩阵用L(x,y)表示,其中每个元素代表对像素点f(x,y)所赋予的标号.
L(x,y)要满足:
如果p(x,y)∈RB,L(x,y)=0;如果p(x,y)∈,L(x,y)=∞;
标记的过程如下,一开始,初始化矩阵为:

然后,在迭代时刻t>0,矩阵[L(p)]t的迭代表达式为

其中

参数λ>0是连通区域计数器,每次将L(p)t的值设为λ时就加1,整数m和n定义在连通性的领域中.当迭代表达式无法进行更新且L(p)不为有限值时,认为像素点p属于一个新的连通区域并将其标为λ.这样λ的值总比当前检测到的连通区域数大.上述迭代过程一直进行到矩阵不再发生变化.在连通区域的标记过程结束时,具有标号L(x,y)=0的像素属于RB,而属于RcB中的同一连通区域的像素具有相同的标号,即区域Ri的标号为i.
得到各个区域Ri后,可以得到对应的几何描述,这些特征描述丰富了区域的特征属性,刻画了图像中目标的形状等特征.组合成一个6维目标特征向量St(a,l,r,f,c,s),用于本文目标的特征描述及判定:区域面积a为目标区域的像素面积,描述目标区域的大小;区域长度l为最小外接矩形长轴;外观比例r为最小外接矩形的长宽比,描述目标区域的矩形;形状因子f为面积a与区域边界像素数目的平方的比值,描述目标区域的边界复杂性;圆形性c为区域半径的平方与面积的比值,描述区域的紧致程度;对称性s为目标区域关于最小外接矩形中心线两边的像素数的差异与面积的比值,描述目标区域的对称性.对于不同类型的目标特征量会有所不同,各个量所处级联位置也会有变化.区域质心即一阶矩,描述区域的位置,提供定位信息:

3 实验及分析
搭建视景仿真平台,给定探测距离、姿态仿真参数,得到不同探测距离下的目标场景的成像,并通过本文方法对成像场景进行目标分割.首先建立目标场景的相关知识:确定待分割目标的对比度特性即目标的亮度值与背景亮度值的关系;给定待分割目标的基准特征向量及每个特征量的权重及级联关系.对前面提到的距离300和1000m时对2.3m×2.3m的坦克成像的2个场景进行处理.给定场景后可以知道目标亮度值低于或高于背景亮度值,2个场景中目标亮度值均低于背景.给定目标类型后可以设定其外观比例、对称性、矩形度及圆形度的判定阈值,已知导引头光学系统的焦距及探测器像元尺寸,可以得到相应距离下目标的理想成像大小,初始粗阈值为全局的灰度均值,分别为181和187.距离300m时的目标场景经过一次调整,正确分割出了目标区域,具体参数如表1所示.距离1000m时的目标场景经过2次调整,正确地分割出了目标区域,具体参数如表2所示.图5给出了2个场景的分割结果.

表1 距离300m时目标分割结果参数

表2 距离1000m时目标分割结果参数

图5 300m及1000m场景目标分割结果
4 结论
实验结果表明,采用基于知识的目标分割方法对已知类型目标进行分割,结合先验知识提高了分割处理的自动化程度,能够快速得到正确的目标区域,有效地降低全局信息对目标的干扰,同时减少运算量,将全局处理变成局部处理,并为后面的目标识别和跟踪提供依据,提高了系统整体的实时性.目标的分割是捷联导引头上目标识别技术的一个重要环节,对全局景象进行有效地划分处理,保证目标定位跟踪的实时完成.当然本文方法对给定类型目标的有效分割有一个重要的前提,即目标本身的可分割性.目标无法分割的主要原因是目标纹理与背景纹理交叉,导致得不到一个目标完整的连通区域,因此对于纹理目标还需进一步研究基于纹理特征知识的纹理区域分割方法.
[1]林喆,姚郁,遆晓光,等.捷联成像导引头相关跟踪算法研究[J].兵工学报,2009,30(5):572-579.
[2]訚胜利,张跃,张鑫,等.相位匹配法用于提高非制冷全捷联导引头制导信息精度[J].光学与光电技术,2013,11(1):76-80.
[3]张跃,刘波,訚胜利.捷联式光学导引头的稳定、跟踪原理与系统仿真[J].光学精密工程,2008,7(1):89-92.
[4]王保云,张荣,袁圆,等.可见光遥感图像中舰船目标检测的多阶阈值分割方法[J].中国科学技术大学学报,2011,41(4):293-298.
[5]谭衢霖,奥尔德雷德,胡吉平.基于知识规则的数字扫描图像目标边界提取[J].应用基础与工程科学学报,2013,21(3):553-561.
[6]王奎,张荣,尹东,等.基于边缘特征和 AdaBoost分类的遥感图像云检测[J].遥感技术与应用,2013,28(2):263-268.
[7]白杨.成像导引头中自动目标识别关键技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2011.
[8]李闯,丁晓青,吴佑寿.一种改进的 AdaBoost算法——AD AdaBoost[J].计算机学报,2007,30(1):103-109.
[9]VIOLA P,JONES M.Advances in Neural Information Processing System[M].Cambridge:MIT Press,2002:1311-1318.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
自动化学报(2017年5期)2017-05-14
通信产业报(2016年44期)2017-03-13
光学精密工程(2016年1期)2016-11-07
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
雕塑(1999年2期)1999-06-28