
多屏幕三维体显示技术*
2014-09-26 08:59蔡虹宇魏天音游望秋
电子器件 2014年2期
刘 畅,蔡虹宇,魏天音,游望秋,夏 军
(东南大学电子科学与工程学院,南京211189)
多屏幕三维体显示技术*
刘 畅,蔡虹宇,魏天音,游望秋,夏 军*
(东南大学电子科学与工程学院,南京211189)
现如今随着科技的进步,显示技术已不仅仅局限于二维的平面中,各种三维的显示技术层出不穷。本项目对基于多块PDLC(聚合物掺杂液晶[1])屏幕的立体显示技术进行了研究,利用了PDLC屏幕的开关特性,采用多屏幕分时显示,同步的全息投影的方法,显示出三维的图像。实验中分析了PDLC屏幕的响应特性,设计了屏幕的驱动电路的硬件、时序和波形,探讨了基于Opencv的景深提取算法。最后获得了有一定景深的三维图像。
三维显示;多屏幕分时显示;同步全息投影;PDLC屏幕;Opencv;景深
近年来,裸眼3D显示技术逐步发展,目前主流的裸眼3D显示技术主要包括光栅3D显示、集成成像3D显示、体3D显示和全息3D显示[2]。PDLC屏幕是一种具有开关特性的器件[1]——即当屏幕不通电时不透明,此时可在屏幕上投影;当通电时,则完全透明,无法投影。于是,我们可利用高压的方波来分时的开关这些屏幕,利用空间光调制器(SLM)[3]将经过景深提取、分数阶傅里叶变换之后的图像,同步的投影到屏幕上;屏幕快速切换,利用人眼的视觉暂留特性,便可以将二维图像中包含的三维信息呈现于空间中,达到了裸眼3D的效果。
1 PDLC屏幕的特性
1.1 聚合物掺杂液晶的显示原理
聚合物为光学上的各向同性材料,其折射率为np,而液晶为各向异性材料,它有平常光折射率no和非平常光折射率ne。在选择这两种材料时,一般总是让聚合物的折射率np约等于液晶的平常光折射率no。但是,由于在零场时聚合物分散液晶中各液晶微滴指向矢的方向是随机分布的,几乎所有液晶微滴与母体聚合物之间都会出现折射率失配(是指np≠ne),就导致光的散射。由于膜的厚度相对液晶微滴的尺寸要大得多,所以在光透出膜之前,将受到多次散射,这有点类似与磨沙玻璃的情况,称为关态(Off State)[1]。处于零场关态的PDLC膜光散射状态取决于膜中液晶的含量,微滴的大小,双折射率的大小,以及膜的厚度等。PDLC的在电场情况下的显示原理可用图1来简单表示。
图1(A)就表示零场关态时的光散射情况,由于光受到强烈的散射,其垂直透过率极低,表现为暗态。当PDLC加上足够的电压时,液晶微滴中液晶分子受到电场的作用,其指向矢将沿着电场的方向,这同一般的液晶显示器是一样的,如图1(B)所示。就单个液晶微滴而言,其尺寸是很小的,满足光波导条件,另外由于液晶的平常光折射率no等于聚合物的折射率np,两者的折射率相匹配,对入射光没有散射,于是光就顺着电场方向出射。这种加上足够电压就打开的情况,称为开态(on state)[1]。如果电压充分大时,垂直透过率将达到最大,表现为明态。可见,通过电场,就可以控制PDLC的光开关作用,实现明暗显示。

图1 PDLC开、关态的原理示意图
1.2 屏幕特性的测试
我们在测试过程中将用一个高电平为60 V左右的方波,加在屏幕的两端,切换屏幕的同时,在屏幕的一边放置一个发出稳定的光强的仪器,在屏幕的另一端测定透过屏幕的光强,从而确定屏幕的散射状态。在时间轴上对测定的数据进行绘图,比较,分析。通过调整这个方波的某些参数,来实现对屏幕特性的测试。
如图2,方波的高电平的时间为2A+3B,低电平的时间为A,通过调整A、B的值,观察屏幕能透过的光强,获取屏幕的响应特性。

图2 测试用的波形及其参数
当最开始时,将A设为13 ms,B=2 ms,当屏幕从开态切换为关态时,由图3可见,屏幕所透过的光强缓慢下降,在下一个开态到来时,并不能下降到最低的状态。对参数做出改动,如图4所示,A=19 ms,B=2 ms,此时的光强曲线依然缓慢下降,直到下一个开态到来时,还是没有稳定在某一个低透过率的情况。而此时整个周期已达63 ms,显然已经不能满足后续试验所要求的50 Hz的情况。

图3 光强与时间的关系图

图4 光强与时间的关系图
1.3 结果分析
由上文知,在普通的方波作用于PDLC屏幕时,屏幕恢复到关态的速度太慢,不能满足本项目后续进程的要求。因此,我们将对脉冲做些改动:我们每一次关屏幕时,先将原来的电压置零,再给一个反向的窄脉冲,这个反向窄脉冲将屏幕的电压快速的拉下来,缩短了弛豫时间。从而在短时间内实现开态到关态的切换(如图6所示,单路输出波形所示)。
2 驱动屏幕的硬件电路
2.1 硬件电路概述
本装置中需要驱动PDLC屏幕工作,基本要求为:电路的一端外接高压电源,利用MOS管的开关特性,将输入的FPGA产生的方波变成高电平等于高压源电压(60 V~100 V)的,与原波形时序相同的方波。最终设计出如图5的电路。
2.2 硬件电路详述
数字的控制信号(一般可由FPGA产生)由YIN _1输入,通过光耦开关6N137[4]实现数字地与模拟地的隔离。在经过一个集电极开路(7406)的反相器之后,到达级联的三级管的基极,三极管的输出控制MOS管的栅极。MOS管的一端接的是近100 V的高压,三极管的输出的变化范围为9 V,不可能提供接近高压源的电压去控制MOS管的通断,所以需要一个DC-DC[5]来隔离地信号,从而使级联的三极管工作在虚拟地上,而实际上相对于模拟地的电压在电源电压附近,从而使两个级联的三极管的输出可控制MOS管的通断。当MOS管可以受控通断时,就可使用MOS管的开关特性来形成输出的方波信号。在MOS管与三级管之间,接了一个电阻,电阻的作用是与MOS管中的寄生电容匹配,降低MOS管的时间常数,实现MOS管的快速响应,在此电阻上并联了一个快恢复二极管,作用是在电压反相时构建电流通路,使得寄生电容上的电荷快速流失,提高响应速度。在图5中,之所以电路后半部分会有两路类似的结构,仅仅是为了提高电路的输出功率。
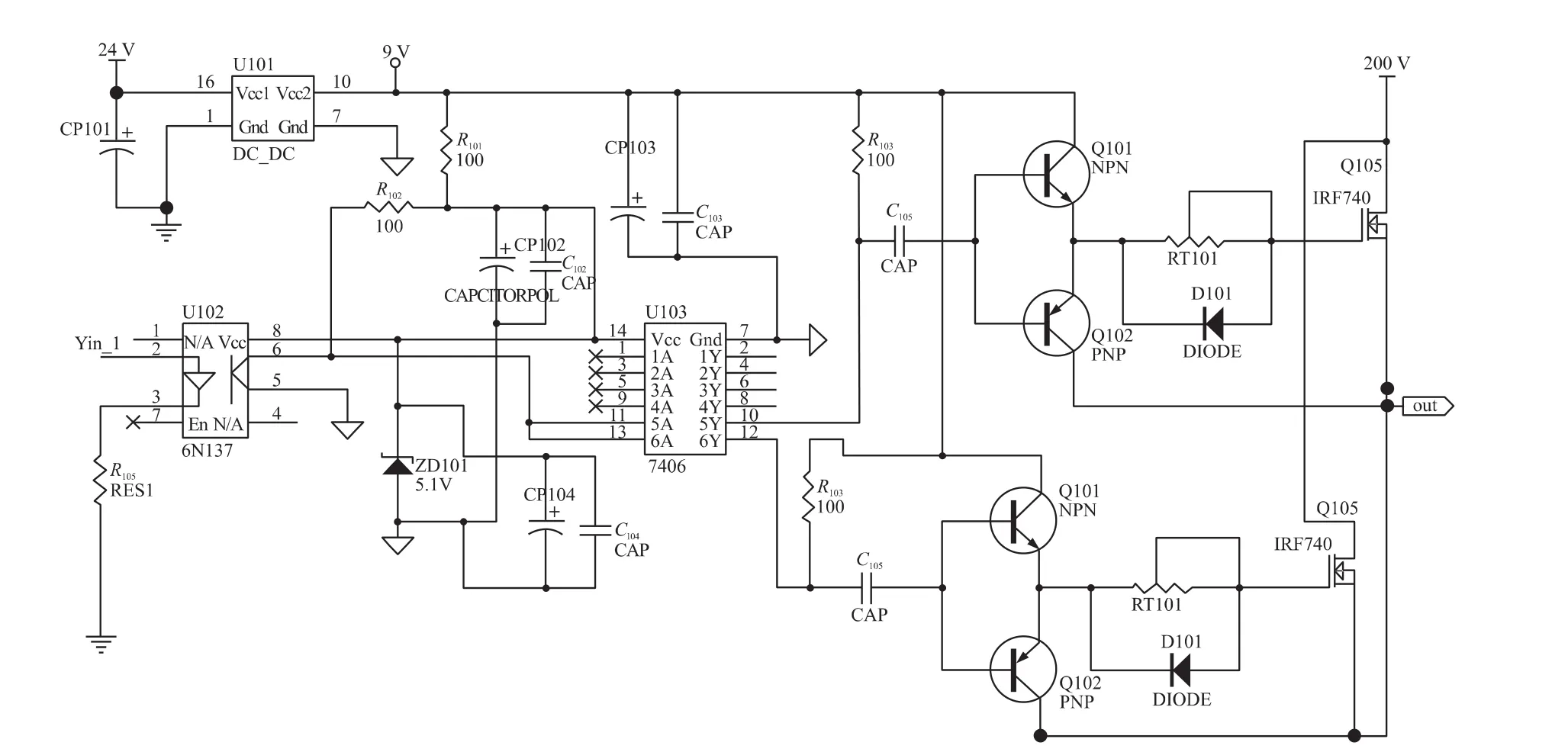
图5 驱动电路图
3 驱动波形的时序
空间光调制器与PC使用DVI接口连接,在PC与空间光调制器传输图像信息时,此DVI接口可发送给FPGA一个周期性的尖脉冲,此脉冲的周期,即为空间光调制器投影三张不同景深的图片的其中一张所用的时间。我们在建立电路与投影仪器的协同时,需要获得此尖脉冲作为时钟,而后将输出3路给驱动电路的信号,每一路信号将有控制正电源、正电源接地通路和负电源、负电源接地通路的总共4个I/O口输出的波形,从而实现对3个屏幕的驱动。我们在编程时,使用的是Altera公司的DE0开发板[6],其上载有Altera CycloneⅢ型fpga芯片[7],上文提到我们要驱动三块屏幕,每块屏幕需要4路信号,于是我们将分配12个I/O口。
3.1 每一路的正负电压的关系
由于在实验中,对每一块屏幕而言,它将受到60 V到100 V的驱动电压。因此,如果仅仅有正电压的驱动的话,在运行过程中的平均电压将高于周围环境中的电压,甚至平均电压差有可能超过安全电压,会造成安全隐患。所以我们将电路设计为正负电压交替驱动,这样PDLC的屏幕将处于平均电压为零的状态。
除此之外,根据对屏幕测试的结果可知,每一次屏幕从开态切换到关态会有一个弛豫时间,导致切换速度变慢。因此我们每一次关屏幕时,先将原来的电压置零,再给一个反向的窄脉冲,这个反向窄脉冲将屏幕的电压快速的拉下来,使屏幕快速回到关态,缩短了弛豫时间。
因此,单独对每一路而言,当正负电压叠加后的输出波形如图6所示。

图6 单路输出
3.2 各块屏幕间的时序
现阶段试验中,我们实现了三块屏幕交替闪烁的关系。在投影某一块屏幕时,它前面的屏幕必须透明,这样空间光调制器才可以将此屏幕对应的图像投上去。于是我们设计了如下的时序:
当投影在屏幕一上的时候,屏幕一不透明,波形为低电平。当投影在屏幕二上时,屏幕一透明,高电平,屏幕二不透明,低电平。当投影在屏幕三上时,屏幕一、二透明,高电平,屏幕三不透明,低电平。于是就形成了:三路波形依次以一定的时间差显示同一个波形的循环结构。如图7所示(此处我们仅仅给出了正向的波形,负向的波形同理可知)。

图7 各屏幕之间的时序
4 基于Opencv的二维图像景深提取算法
本项目中,我们先对普通的图片做基于Opencv的景深提取,获得灰度图,然后再利用分数阶傅里叶变换,将图片中不同的景深的部分分层次显示出来,在此处主要简述了基于Opencv的景深提取算法。
4.1 何为景深
景深是指在摄影机镜头或其他成像器前沿着能够取得清晰图像的成像景深相机器轴线所测定的物体距离范围。
4.2 关于Opencv
Opencv是一个跨平台计算机视觉库。它实现了图像处理和计算机视觉方面的很多通用算法[8]。
Opencv拥有包括300多个C函数的跨平台的中、高层API。在这个项目中,我们仅使用Opencv的内部库,没有自己编译的Opencv库。
4.3 立体匹配与视差计算
立体匹配主要是通过找出每对图像间的对应关系,根据三角测量原理,得到视差图;在获得了视差信息后,根据投影模型很容易地可以得到原始图像的深度信息和三维信息。
4.3.1 SAD匹配代价叠加
用以计算视差的图像有两幅,以水平前向的两个摄像机为例,左边摄像机拍摄到的为图8,右边的为图9。

图8 左边摄像机拍到的图像

图9 右边摄像机拍到的图像
匹配两幅不同视图的3D点,必须在它们重叠视图内的可视区域上才能被计算。因此一开始,必须对两幅视图进行双目匹配。双目匹配的算法主要有3种:SSD,SAD和NCC。这里我们选取SAD算法。
SAD,即绝对误差累计的最小窗口,它用灰度值来表征两幅图像之间的差异。将左右两幅视图每个像素点的灰度值逐一相减取绝对值,再横向纵向相加求得总和。公式如下:

算法对于两幅图像的亮度差异进行预处理,使得两图在匹配之前能够有相近的亮度从而减小误差,也增强了图像文理。这个过程通过在整幅图像上移动窗口,即匹配块来实现。
图8和图9对齐之后,就开始在同一行搜索。对于图8的某一点,搜索图9的同一行。以该点为中心,取一个匹配块(比如9×9),再在图9搜索等大的匹配块,计算两个块之间的SAD值。SAD值最小的,代表它们灰度值的差异最小,那么两个中心点就匹配起来了。
也就是说,只有当一定区域内的灰度值差异相同,才能保证这两点是匹配的。
匹配块窗口大小,最小为5×5,最大为21×21,这里我们取9×9,可以达到较好的匹配效果和较短的运行时间。
4.3.2 SGBM算法的状态参数设置
SGBM作为一种全局匹配算法,立体匹配的效果明显好于局部匹配算法,但是同时复杂度上也要远远大于局部匹配算法。
由于SGBM算法已经集成,并且其调用的库函数也相当成熟,因此我们只关心算法的外部接口,也就是状态参数的设置
匹配过程通过SAD滑动窗口来完成。对图8上的每个特征而言,搜索图9中的对应行以找到最佳匹配。对于两个水平前向平行的摄像机,图9上的匹配位置一定会在图8的相同行上。
以下为滑动窗口的相关参数:
(1)控制匹配搜索的第1个参数是minDisparity,它说明了匹配搜索从哪里开始,默认值为0。
(2)程序在numberofDisparities设置的视察内开始搜索,默认值为64。
(3)通过限制同一行上匹配点的搜索长度来减少搜索的视差个数,从而减缩计算时间。
由于视差和景深成反比,因此,通过设置最小视差和搜索的视差个数,就可以建立起一个双眼视界,这个3D体被立体算法的搜索范围所覆盖。
运行效果如图10、图11所示,图11为运行结果。

图10 未提取景深的原图

图11 灰度图
结果说明:灰度图的视觉范围与双目视觉图像中的左视图保持一致。灰度图像上,颜色越浅,表示该处与人眼的距离越近;反之则越远。
从运行出来的灰度图可以看出,SGBM具有一定的准确性,圆锥、人脸和栅栏的轮廓均有所体现,由浅到深表现出的由远及近也大致准确。但算法自身仍存在以下缺陷:
(1)精确度不够 原图中,人脸有凹凸的五官。也就是说,鼻梁(凸起)和与其处在同一水平位置的脸颊相比,显然,鼻梁与观察者的距离比脸颊要远。但是灰度图上整张脸呈现均匀的灰色,没有凹凸感,即没有体现精密的景深。
(2)图像轮廓有所畸变。
(3)左右两幅视图必须底部对齐且大小相同,没有自动校正。
5 小结
本项目设计了一个基于PDLC屏幕的多屏幕三维立体显示系统,并研究了基于Opencv的景深提取算法。通过以上研究,我们可以成功的将一幅二维的图像中的三维景深信息提取出来,并转化为不同景深的图片供空间光调制器呈现出全息投影投影;而PDLC屏幕将与投影同步切换,从而使图像成像于与其景深相对应的屏幕之上,达到了三维立体显示的效果。其装置实物图如图12所示。

图12 实验装置图
本显示系统已经具备了三维显示的要素,投影成像清晰稳定,屏幕的切换速度达到要求,开态与关态的对比明显,屏幕间的时序合理;算法也能够正确的提取景深。但因其尚在试验阶段,尚有许多提升的空间,以待后续的研究进展去完善之。
[1] 曾勃.聚合物分散液晶的制备及电光特性研究[D].成都:电子科技大学,2006.
[2] 王琼华.3D显示技术与器件[M].北京:科学出版社,2011: 135-182.
[3] 王永强,刘太刚.空间光调制器简介及其应用[J].焦作大学学报,2007(3):82-84.
[4] 8 Pin Dip High Speed 10 Mbit/s Logic Gate Photocoupler 6N137 Datasheet[R].2009:1-15.
[5] Minmax.MIW1100series Datasheet[R].2005:1-3.
[6] Altera.DE0 User Manual[S].2009:30-32.
[7] Altera.CycloneⅢDevice Datasheet[R].2008:1-6.
[8] Gary Bradski,Adrian Kaehler.学习opencv[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009:441-452.
刘 畅(1992- ),男,汉族,重庆梁平人,东南大学电子科学与工程学院,本科生,neverstepbackliuc@gmail.com;

夏 军(1974- ),男,汉族,江苏泰兴人,东南大学电子科学与工程学院显示技术研究中心副教授,研究方向为三维显示、柔性显示,xiajun@seu.edu.cn。
Multi-Screen 3D Volumetric Displaying Technology*
LIU Chang,CAI Hongyu,WEI Tianyin,YOU Wangqiu,XIA Jun*
(School of Electronic Science and Engineering,Southeast University,Nanjing 211189,China)
Nowadays,displaying technologies are developing rapidly,they have not only confined to the two-dimensional plane,many kinds of three-dimentional displaying technologies have been emerged.This program did some research on volumetric displaying technology based on multi PDLC(Polymer Dispersed Liquid Crystals)-screens,we took advantage of the switching character of PDLC-screens,used the method of time-divided displaying of multi screens and synchronized holographic projection to display a 3D graph.In this program,we analysed the response characteristics of PDLC screens,and designed the hardware of the circuit,the synchronization timing of PDLC-driving and projection,and the signal waveform of the PDLC-driving circuit.Furthermore we discussed the depth-of-field extraction algorithm based on Opencv.Finally we get 3D-graphs with different depth-of-field.
3D displaying;time-divided multi-screen displaying;synchronized holographic projection;PDLC-screens;Opencv;depth-of-field
10.3969/j.issn.1005-9490.2014.02.008
TN27
A
1005-9490(2014)02-0204-06
项目来源:国家大学生创新性实验计划项目(1210286031)
2013-05-29修改日期:2013-06-20
EEACC:7260
猜你喜欢
数学物理学报(2021年6期)2021-12-21
成都信息工程大学学报(2021年4期)2021-11-22
数学物理学报(2021年1期)2021-03-29
液晶与显示(2020年8期)2020-08-08
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
液晶与显示(2015年1期)2015-02-28
液晶与显示(2014年2期)2014-02-28
数码摄影(2009年8期)2009-10-14
