预警机协同预警作战模型研究
2014-10-13 07:59李广强鲁瑞达王茂华
舰船电子对抗 2014年3期
李广强,鲁瑞达,王茂华
(空军预警学院,武汉430019)
0 引 言
预警机是防空预警作战中的重要成员,其担负的作战任务及其作战环境决定了预警机需要与其他预警探测装备及指挥所等作战单位进行情报协同。这些协同单位包括地面防空部队、指挥所、其他预警机、支援飞机(包括电子战飞机、空中加油机等)和海面舰艇等[1]。研究预警机协同预警作战模型,需充分考虑各个协同单位之间的情报协同关系,有利于充分提高防空预警系统整体作战效能。
本文重点针对2种协同情形的模型进行研究:一是多架预警机协同预警探测模型;二是预警机与舰载雷达协同预警探测模型。
1 空空协同预警作战模型
在无地(海)面雷达支援的情况下,预警机遂行远程预警探测任务时,多架预警机进行协同部署,组成空基雷达网[2]。该作战样式主要适用于远离海岸线的前出作战。多架预警机组成空基预警探测网时,各个预警机分别主要负责各自责任区的空情掌握,同时相互补盲,形成连续覆盖空域。
多架预警机按图1中所示方式并列部署,每架预警机在指定空域巡逻飞行(虚线为预警机出返航线路)。各预警机阵位间隔为L;R强为预警机强效区半径;R弱为预警机弱效区半径,则当L<2R强时,预警机可以按照任意阵位巡逻。
而当2R强≤L<(R强+R弱),如图1中B与C,预警机在进行阵地部署时,2架预警机的强弱效区要在任意时刻相互重叠。同时,错开转弯时间,以避免转弯盲区。
当L≥(R强+R弱),如图1中A与B,在2架预警机之间存在弱效区,有一定的漏警率,给敌机实施突袭带来可趁之机。
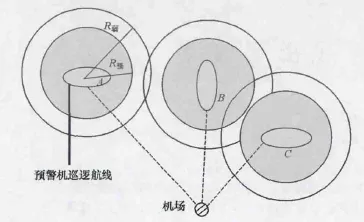
图1 多机并列部署
综上所述,如果预警机按式(1)所示情形部署时,虽然不会在所覆盖区域形成盲区,但是覆盖区域受到一定的限制;按式(3)所示情形部署时,存在一定的漏情,没有达到空情保障要求。所以可采取式(2)所示情形进行部署。
如图2所示,在某一空域部署3架预警机A、B、C,其巡逻边长和转弯半径相同,沿航迹顺时针巡逻飞行。图中,数字表示预警机巡逻航线上的特定时刻节点,1、2表示平飞航线的中点,其余数字表示预警机转弯节点,具体位置如图中标注所示。假设T1时刻预警机A到达其巡逻航线1点处并向右飞行,逐渐覆盖预警机A与预警机B之间的弱效区,预警机B到达自身巡逻航线4点处并向下飞行,逐渐覆盖预警机B与预警机C之间的弱效区,预警机C由1点向右巡逻飞行。T2时刻,预警机A到达2点处并向左飞行,预警机B到达6点处,逐渐覆盖预警机A与预警机B之间的弱效区,预警机C到达2点处并向左飞行,对预警机B与预警机C之间的盲区进行补盲。
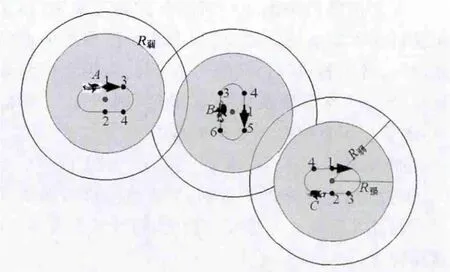
图2 多架预警机协同预警探测
综上所述,合理部署多架预警机的巡逻空域及预警机之间的部署阵位,有利于充分发挥空基预警探测网的整体效能。
此外,预警机还可以采用“环形”方式巡逻飞行,即多架预警机在同一航线上巡逻飞行,保持一定距离。由于转弯时预警机基本完全丢失目标,而预警机速度慢,转弯时间长,敌机利用我预警机转弯时机实施突袭或进入我预警机底空盲区,对我预警机造成极大的威胁。
如图3所示,当2号预警机转弯时,1号预警机对其转弯盲区进行补盲,3号预警机与1、2号预警机进行底空盲区和机身盲区互补。
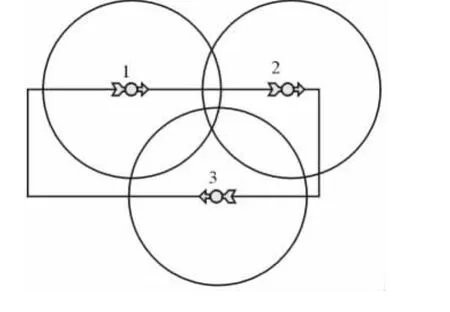
图3 多架预警机环形巡逻部署方式
2 空海协同预警作战模型
海面舰队在遂行作战任务时,由于自身速度缓慢,舰载雷达探测威力有限,往往容易受到敌方的突袭。出动预警机对海面舰队进行空情保障,有利于提高舰队的生存能力,同时为舰队对敌方实施火力打击提供空情信息。
空海协同预警作战的主要特点有3个方面[3]:
一是海面舰队在进行情报收集的同时,更重要的是作为作战单元对敌方实施火力打击。所以,空海协同预警作战时,需以海面舰船的作战需求为主,预警机的主要作用是为海面舰船提供空情保障。
二是相对空地协同而言,空海协同预警作战区域距离海岸线更远,单架预警机在巡逻空域有效巡逻时间相对缩减,需要更多的预警机轮流值班来为海面舰船提供空情保障。
三是地面火力支援力量减弱。当预警机在遂行预警探测任务时遇到安全威胁,地面火力无法对其实施有效保障。预警机由于受到威胁而放弃作战任务进行返航的概率提高。
如图4所示,以预警机巡逻空域的中心为圆心建立直角坐标系,Y轴的正方向为敌方可能入侵的主要方向。Y轴上方有3艘舰艇,编号分别为1、2、3。以舰艇为圆心的圆圈区域为对应舰艇舰载雷达的探测范围。L为敌方火力打击的最大距离。预警机巡逻区域的边长为2a。
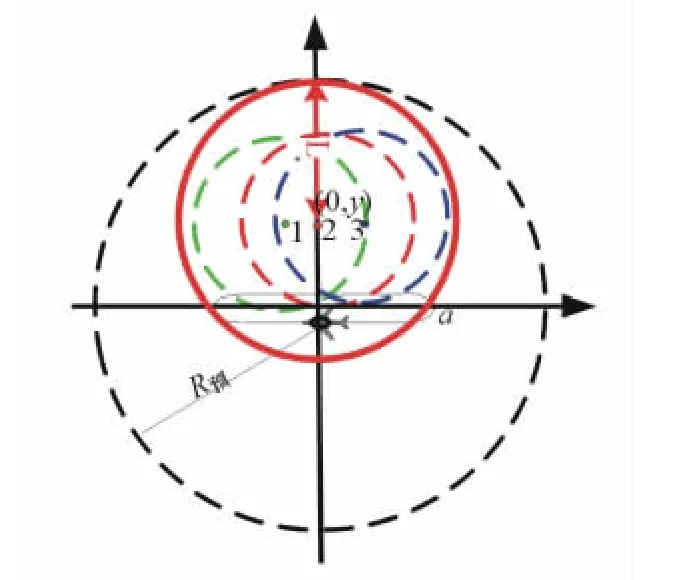
图4 空海协同预警探测部署
设海面舰艇之间的距离为S,S≪L。同时,海面舰队在遂行作战任务时,通常舰队内的舰载雷达轮流开机,所以将海面舰队作为一个点考虑,以该点为圆心,L为半径作圆,敌方目标进入圆形区域则对我舰队造成威胁。在发现概率Pd=0.5、虚警概率及扫描周期一定的条件下,预警机对典型目标的探测距离为R预。为了对敌来袭方向保持最大限度的预警监视,要求预警机转弯半径尽可能小,所以可将预警机看作沿X轴方向作往返运动。为了保障海面舰队不受到敌方威胁,要求预警机对实线圆圈内目标实施全时段监控。由图4可以看出,预警机在转弯时存在与实线圆圈内任意一点距离的最大值。最大值Smax计算公式如下:

为了全时段对威胁目标进行监控,要求:Smax≤R预。
综上所述可得,预警机巡逻边长a与预警机距离海面舰队的距离y之间应该满足的条件:

3 结束语
预警机协同预警作战时,需要充分考虑空情保障区域的大小及位置,充分发挥预警机活动性强及前出距离远的优势,地(海)面雷达灵活部署,从而达到优势互补。同时,地(海)面雷达应为空中预警机提供空情保障,及时发现对预警机安全造成威胁的空中目标[4]。因此,现代战争中,预警探测网应该与防空火力网和电子战部队协同作战,这样有利于实现“1+1>2”的综合效能,同时对提高预警探测网的自身安全也有重要的意义。
[1]罗继勋,雷洪利,胡朝晖,等.预警机指挥控制飞机及编队作战原理[M].北京:解放军出版社,2009.
[2]肖福来,庞雪冰.预警机抗击战斗机的对策[J].外国空军训练,2009(6):9-11.
[3]连鲁军,白雪峰.预警机的作用与发展趋势[J].当代军事文摘,2005(12):29-31.
[4]郦能敬.预警机系统导论[M].北京:国防工业出版社,1998.
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
小哥白尼(军事科学)(2021年5期)2021-08-30
军民两用技术与产品(2021年10期)2021-03-16
科技视界(2020年8期)2020-05-18
小雪花·初中高分作文(2019年2期)2019-06-27
雷达学报(2017年1期)2017-05-17
海峡科技与产业(2016年3期)2016-05-17
为了孩子(3~7岁)(2016年5期)2016-05-14
舰船电子工程(2015年8期)2015-03-14
小哥白尼·军事科学画报(2009年4期)2009-05-11