腹腔微创手术机器人手术器械设计
2014-10-16 10:55邱雪芹付宜利
哈尔滨商业大学学报(自然科学版) 2014年1期
邱雪芹,潘 博,付宜利
(哈尔滨工业大学机器人研究所,哈尔滨150001)
国外机器人腹腔微创手术以及得到了商品化并得以推广,在临床上也到了应用.传统的微创手术器械自由度低,只具有末端两个钳爪的开合自由度,灵活性也较差.腹腔微创手术机器人手术器械在传统微创手术器械的基础上,提高了自由度,灵活性也大大加强[1-2].手术器械的可达范围也提高了.本文所设计的手术器械是机器人微创手术系统的执行部分,它的功能和精度直接决定手术的质量.
1 结构设计
1.1 设计需求
1)结构与材料
由于手术器械所挂接的机械臂末端具有远心机构,搭载手术器械的机械臂自由度要求为平移自由度,手术器械操作杆轴线必须经过远心点[3].手术器械的整体结构必须相对紧凑,以避免挂接手术器械的机械臂尺寸过大,保证机械臂的灵活度和活动空间,防止机械臂干涉.
目前微创手术用鞘管有5 mm和10 mm两种规格,前者用于各类手术器具,后者用于管径较大的内窥镜.考虑到手术器械整体结构比较复杂,选用10 mm的鞘管.因此手术器械末端执行机构的外包圆直径应小于10 mm,即操作杆直径应选取为10 mm(操作杆直径比鞘管直径过小,易造成腹腔漏气).
手术器械的质量影响到机械臂的负载,末端的惯性进一步影响整体机械臂的动力学模型惯性控制.为此,手术器械应减少质量,尽量选用轻便的材料.另外根据国家药监局相关规定,手术器械与人体组织接触部位应选用人体亲和材料.
2)功能与效果
传统手术器械自由度少,灵活性低.为完成腹腔内对组织的夹持、切割和缝合等操作,所设计的手术器械要根据需求增加自由度,提高灵活性.同时还应保证足够的操作精度,以完成各种精细的手术动作.
在手术过程中,手术钳要求保持一定的夹持力,以抓取组织器官或缝针进行缝合.由于传输距离远,因此传动链应尽量简化,以减少传递中力矩损失.手术过程中手术器械频繁更换,要求设计能快速更换的接口,使手术器械迅速搭载到机械臂接口模块上.快速更换手术器械后,机械臂模块能够进入有效驱动状态,减少手术时间,提高效率.
1.2 自由度和传动方式
本课题所设计的手术器械具有4自由度:操作杆的旋转、腕部的转动和两手指各自的转动.所设计的腹腔微创手术用电刀具有3个自由度:操作杆的旋转、腕部的转动和手指的转动,如图1所示.

图1 手术器械自由度
手术器械需要深入人体,传动距离远,可选的传动方式有刚性杆传动、齿轮链传动和绳传动.刚性杆传动不易控制,多自由度机构,体积庞大;齿轮链传动对应用环境要求较高,制造要求高,不便于维护保养;绳传动传动距离长,能够实现远距离交错轴动力传递,传动平稳,但需使用过程中会逐渐变松,需要设置预紧装置.综合上述情况,本文选用绳传动方案,利用线轮拉动驱动绳带动相应关节转动.
1.3 预紧机构
绳的预紧可选用的方法有弹簧预紧、摩擦轮预紧和张紧轮预紧3种[4].本手术器械绳传动空间走向直接,传动绳松动较小,预紧频率低.弹簧预紧传动比不恒定.且当载荷大于弹簧预紧力时,末端相应关节会有空行程,如图2所示;张紧轮需要一定的空间,布局和排线困难;摩擦轮能保证传动刚度,且所需空间较小,可以通过合理的线轮设计达到预紧的效果.针对上述情况本课题选择摩擦轮预紧为所需的预紧方式.
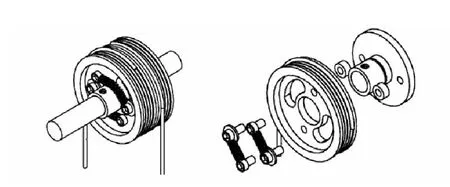
图2 弹簧预紧
手术器械摩擦轮采用左右线轮结构.手指驱动线轮如图所示.半圆结构的两个线轮左右配合,采用两个螺栓夹紧固定在离合盘上.其中一个线轮具有螺旋绕线槽,如图3所示.钢丝绳绕着螺旋绕线槽螺旋绕线,穿过线轮上的孔.拉紧钢丝绳后用将钢丝绳一端固定.如此便完成了钢丝绳的预紧.

图3 摩擦轮预紧
1.4 快换机构
如图4所示,上离合盘(机械臂接口模块)设有非对称的缺口,相应地下离合盘(手术器械本体模块)设有非对称的两个凸柱.当电机旋转,带动上离合盘也旋转.上离合盘旋转至配合位置,弹簧推动上离合盘,凸柱和缺口相咬合,上离合盘带动下离合盘一块转动.下离合盘再驱动手术器械的腕部,手指和操作杆做出相应动作.手术器械两边的突起和手术器械支架上的凹槽相配合,也起到了辅助定位的作用,如图5所示.

图4 手术器械驱动平台

图5 手术器械
当要卸载手术器械时,只需捏住手术器械两边的夹块,夹块推动手术器械支架上的浮动盘向下运动,压住弹簧,如图6所示.浮动盘运动也带动下离合盘向下运动,上下离合盘分离,此时退出手术器械即可.
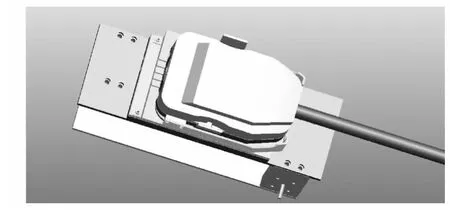
图6 手术器械与驱动平台配合图
1.5 夹持机构
腹腔微创手术机器人的钳子采用了以下设计,如图7所示.
1)设有安装孔,手指转动轴从孔中穿过,手指连接到腕部相对腕部旋转;
2)锯齿状配合结构,两个手指互相咬合,增大摩擦力,便于夹持人体组织等;
3)手术钳手指中间有空腔,在夹持的时候人体组织陷入空腔,防止组织滑脱,手指能进一步抓牢组织.
4)手指内部设有传动绳槽,放置带有锁紧环的传动绳一端;
5)两个手指之间设有突起和凹槽,相互配合,防止手指过度旋转;
6)手指设有环槽来引导传动绳.
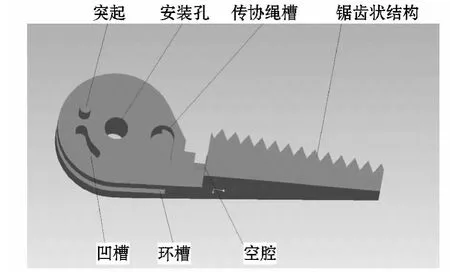
图7 手术器械手指
手指A传动绳的走向为:从手指A上的环槽内引出的传动绳A1经过导向轮1、腕部导向轮1,过腕部连接件上所对应的通孔进入中空操作杆;另一侧走线与此相同,如图8所示.另一手指B的绕线方式相同.
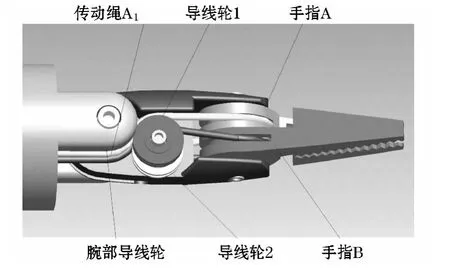
图8 手术器械末端传动绳走向
2 受力分析及电机选型
2.1 手术钳手指受力分析
关于微创手术钳在真实手术环境中所需的操作力,微创手术钳对人体器官组织的夹持力不应大于1 N[5],引进安全系数 1.5,最后选取微创手术钳的夹持力最大值为1.5 N.本文所设计的手术器械,包括操作杆,两个手指,腕部,其中操作杆的所承受的力比较小[6].因此.本课题只对手指传动绳和腕部传动绳进行受力分析,如图9所示.
取一个安全系数1.1,得出机器人微创手术系统手术钳的夹持力fm为1.65 N.
如图所示,在结构设计中,两个手指中,缠绕钢丝槽的半径为2 mm加上钢丝绳自身半径0.25 mm,所以在手指钢丝驱动中,有效动力臂l1=2.25 mm.如图9所示,在手术操作过程中,给手指的负载力臂l2=18 mm.通过下边的关系式求解出手术钳手指传动绳拉力极值为Fm,D指为手指绕线轮直径:

手指转动需提供转矩:

手指所受应力图,如图10所示.

图10 手术钳手指应力图
2.2 手术钳腕部受力分析
对于手术器械末端执行器的腕部主要是用来提升两个手指夹持的组织,因在手术操作中,夹持力一般较小,但是提升时,不仅要克服组织跟两个手爪的重力,还要克服组织之间的牵连力.所以腕部所提供的力必须大于手指力.但是腕部传动链相对短,最后选安全系数1.06.综合给出本文所设计的手术器械腕部提拉力极值为1.749 N.
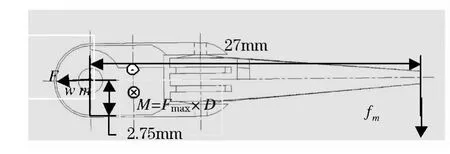
图11 手术钳腕部受力分析

腕部转动需提供转矩:T腕=F×D=17.172×5.5=94.446 N·mm.因此得传动绳最大拉力为17.172 N,下线轮轴绕线圈直径D=5.5 mm.需传递最大转矩T腕=94.446 N·mm.腕部所受应力图,如图12所示.
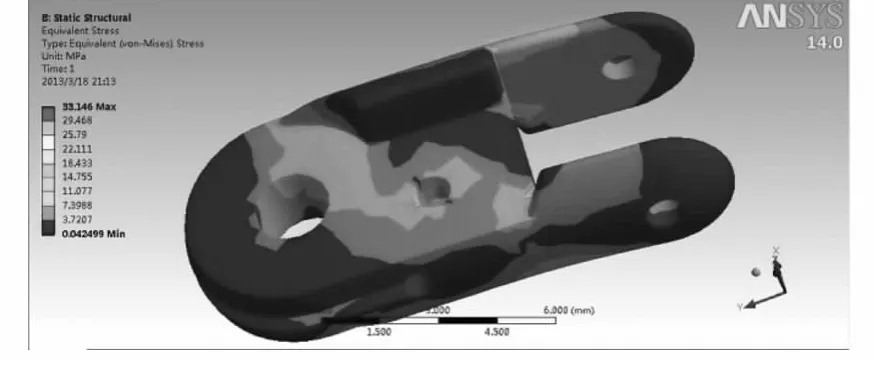
图12 腕部应力图
如图11所示,所设计的手术器械腕部钢丝绕线槽半径为2.75 mm,此值即为腕部运动时的主动力臂,设为m1;
手术器械腕部旋转轴到两个手指协调夹持的有效距离m2为27 mm,即腕部运动时其最大负载力fwm为27 mm.由腕部拉力极值可得出手术钳腕部传动绳的拉力极值F为:
2.3 电机选型
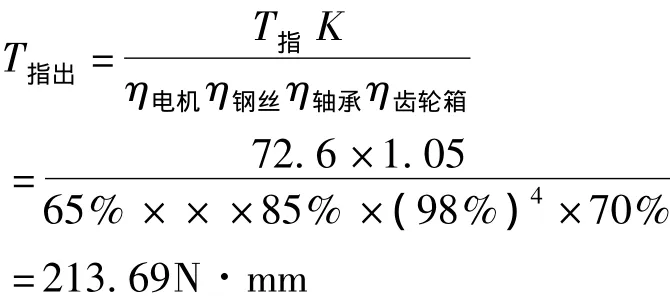
其中:T指出是驱动手指的电机所需输出转矩,K为安全系数,其他表示各零件效率.
驱动手指电机所需功率

其中:T腕出驱动腕部的电机所需输出转矩,K为安全系数.
腕部电机功率


操作杆转动需提供的转矩最小,本课题操作杆选用电机跟手指选同一型号.选maxon电机RE13功率2 W,减速比选131/1.
由上述分析知腕部电机载荷最大,且需传递最大扭矩M=255.06 N·mm.本文腕部电机选用maxon直流电机RE16,额定功率3.2 W.减速比选157/1,正齿齿轮箱GS 16 A.
3 运动学建模
3.1 运动学正解
手术器械第三个自由度和第四个自由度相同,这里采用简化的办法,将手术器械看做三个自由度,进行运动学分析,如图13所示,表1为手术器械的连杆参数表.
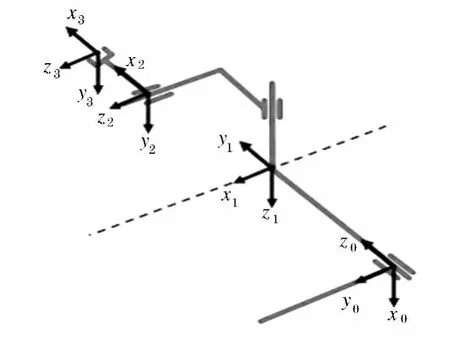
图13 手术器械坐标系图

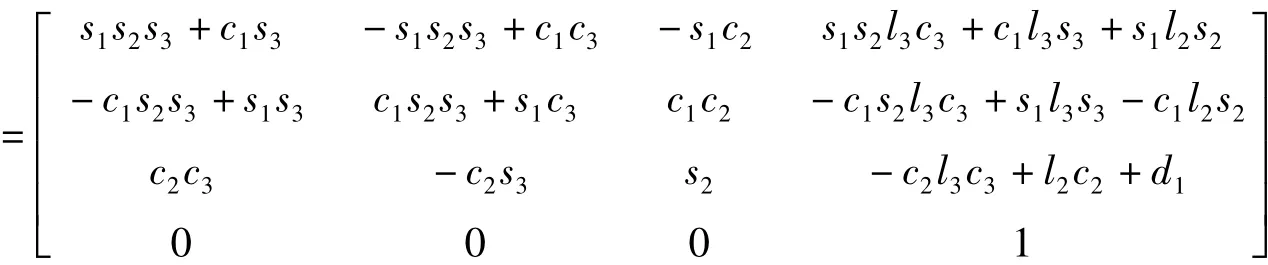
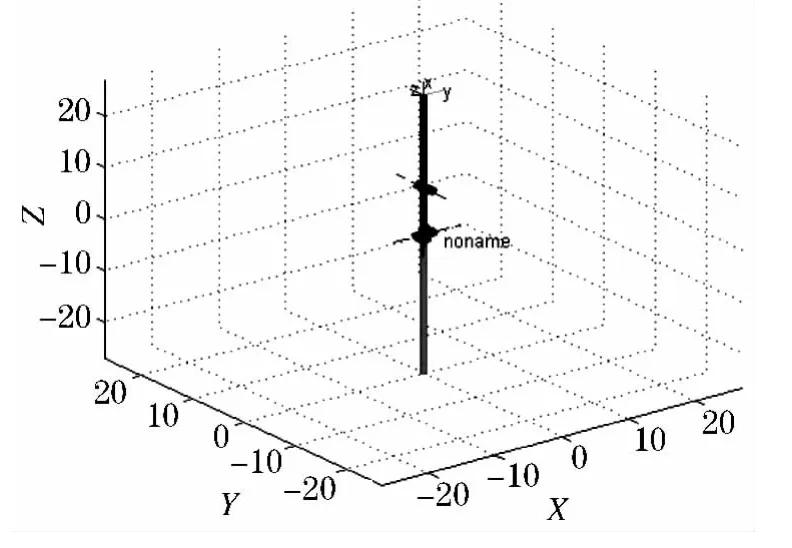
图14 手术器械自由度示意图
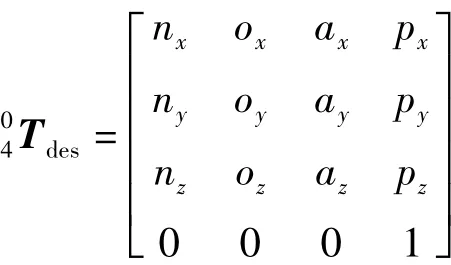
3.2 逆运动学

表1 手术器械的连杆参数表
建立运动学模型的方法有D-H法和旋转动量法,这里选用D-H法进行建模,手术器械自由度如图14所示.

配合关节角的工作角度,通过观察有如下的关系
当 nz<0时
4 仿真实验
将模型导入ADAMS里面,进行运动学仿真,当三个关节角如图15所示,运动学建模产生的轨迹如图16所示.
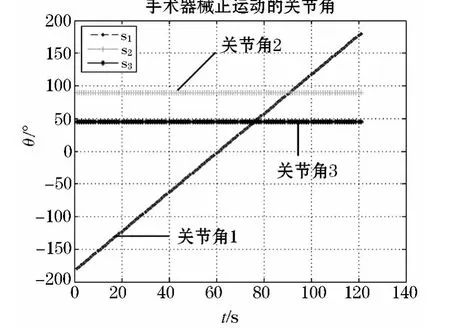
图15 手术器械关节角输入
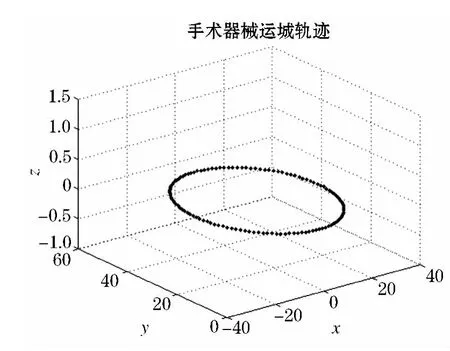
图16 Matlab仿真轨迹
编写程序,对产生的轨迹进行运动学求逆,得到三个关节角的曲线,导入ADAMS进行运动学仿真,得到轨迹如图17所示.
图17 ADAMS仿真轨迹
由运动学正向建模得到的仿真轨迹与逆运动学求解的关节角导入ADAMS进行仿真的轨迹相同,由此验证了运动学建模及逆运动学建模是正确的.
5 结语
本文对所设计的腹腔微创手术机器人手术器械进行了运动学建模和仿真.手术器械的设计满足腹腔微创手术机器人的操作要求.
[1]张西正,侍才洪,李瑞欣,等.医疗机器人的研究与进展[J].中国医学装备,2009,6(1):7-11.
[2]潘 博,付宜利,王树国.微创条件约束下内窥镜操作机器人运动学[J].机械工程学报,2009,45(3):163-168.
[3]WANG H J,WANG S X,DING J N,etal.Suturing and tying knots assisted by a surgical robot system in laryngeal MIS[J].Robotic,2010,28:241-252.
[4]罗 护,沈 军,盛德军.微型钢丝绳传动绳槽匹配及设计方法研究[J].机械科学与技术,2010,29(3):329-332.
[5]KWOH Y S,HOU J,JONCHHEERE E A,etal.A Robot with Improved Absolute Positioning accuracy for CT Guided Stereotactic Brain Surgery[J].IEEE Transactions on biomedical Engineering,1988,35(2):153-160.
[6]方婉霏,潘 博,付宜利.微创手术机器人被动式关节设计和优化[J].哈尔滨商业大学学报:自然科学版,2013,29(3):309-313.
猜你喜欢
中老年保健(2021年5期)2021-08-24
中老年保健(2021年6期)2021-08-24
中老年保健(2021年7期)2021-08-22
世界最新医学信息文摘(2021年12期)2021-06-09
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
上海医学(2019年1期)2019-04-13
制造技术与机床(2018年11期)2018-11-23
海军航空大学学报(2015年1期)2015-11-11
中国当代医药(2015年20期)2015-03-01