
航天器快捷交会技术分析
2014-11-20 08:42朱仁璋王鸿芳丛云天李颐黎余梦伦
载人航天 2014年2期
朱仁璋,王鸿芳,丛云天,李颐黎,余梦伦
(1.北京航空航天大学,北京100191;2.中国空间技术研究院,北京100094;3.中国运载火箭技术研究院,北京100076)
1 引言
在飞船与空间站的交会对接飞行中,限于飞船密封舱的舱内容积,飞船难以给航天员提供宽敞的空间与舒适的环境。在联盟-TMA下降舱中,每个乘员仅有0.5 m3的自由空间,即使算上生活舱,也只有1.2 m3的自由容积[1]。联盟TMA-08M指令长Vinogradov在飞行前指出[2],在飞船入轨后的初期飞行期间,乘员感受正常,飞行4至5 h后,才开始感到失重引起的难受。因此,尽快离开飞船进入空间站,将乘员生理方面的不适与风险减到最低程度,是航天员的愿望,也是航天工程师研究快捷交会的初衷。
此外,从飞行任务考虑,快捷交会还有下列长处:①航天员可尽早开始空间站工作;②可减低载人飞船交会飞行期间的资源消耗;③可满足某些有效载荷(特别是生物与生命科学实验品)尽快进入空间站实验环境的需求;④有助于执行应急运输与空间救援使命;⑤有利于太空旅游事业的发展。
交会飞行一般都采用共面发射,以免除轨道面变化的机动,减少变轨推进剂消耗。快捷交会的必要条件是:①在较短的交会飞行时间内,追踪飞行器可完成从发射至对接的一系列交会程序(包括变轨、调相、逼近等);②在共面发射的约束下,可获得与交会飞行时间相匹配的较小的初相角(Initial Phase Angle)[1,3-5]。
对于国际空间站(ISS)使命,俄罗斯“进步”号/联“盟号”飞船的传统交会飞行时间约为2天,日本货运飞船“HII转移飞行器”(HTV)与欧洲“自动转移飞行器”(ATV)的交会飞行通常需一周时间[20,25,26]。从 2012 年 8 月至 2013 年 5月,俄罗斯已成功实现3艘“进步”号货运飞船和2艘“联盟”号载人飞船与ISS对接的快捷交会,将飞行时间缩短为6 h[1,2,5-19]。
本文着重阐述航天器交会飞行设计原理,探讨快捷交会设计方法,解析俄罗斯进步号与联盟号飞船的快捷交会技术。
2 交会飞行设计
2.1 朗伯特解的应用[5]
朗伯特解可用于给定交会时间的双冲量最小速度增量的空间交会问题,即空间点与点之间的转移。问题可表述如下:①设目标飞行器始终在半径为r2(轨道角速度n2)的圆轨道上运行;②追踪飞行器在初始时刻t0,位于半径为r1(轨道角速度n1)的共面圆轨道上,r1≤r2;③t0时刻的相位角(初相角)记为θ0,终端时刻te的相位角(末相角)记为 θe,θe≈ 0;④交会飞行时间记为T,T=te- t0;⑤给定r1、r2、θ0、θe、T,按两次冲量速度增量之和为最小的要求,确定冲量机动时刻、速度增量及其它飞行参数。
对V-bar逼近或由V-bar绕飞的交会飞行,从入轨至离开V-bar停泊点,可划分为3段:①初始轨道飞行段;②转移轨道飞行段;③目标轨道飞行段(终端停泊段)。冲量M1与冲量M2分别在时刻t1与时刻t2施加在转移轨道飞行段的起点与终点,使追踪器进入邻近目标器的V-bar停泊点。追踪器在初始轨道、目标轨道(停泊点)、转移轨道的飞行时间分别为Δt1=t1-t0,Δt2=te-t2,tf=T-(Δt1+Δt2)。记初相角与末相角之差为Δθ= θ0- θe,则两次冲量(M1、M2)之间的地心张角为 Θ =Δθ+n2tf- ( n1-n2)Δt1-2kπ,k为整数,0≤Θ≤2π。记Δv1、Δv2分别为M1、M2提供的速度增量,其和为 Δv=Δv1+Δv2。设定Δt1、Δt2,对每组 Δt1、Δt2,有相应的 Δv,其最小值记为(Δv)min。这样,空间交会问题便可转化为朗伯特问题求解:设定 Δt1、Δt2,按 r1、r2、Θ、tf求解转移轨道参数。在所有解中,对应(Δv)min的解即为所求。表1给出两个算例(表中h1=r1-R,h2=r2-R,R为地球半径),算例1的交会飞行时间为2天,给定参数可实现霍曼转移,总速度增量(86 m/s)为霍曼转移速度增量。算例2的给定参数不可能实现霍曼转移,总速度增量(110 m/s)大于霍曼转移速度增量(57 m/s);若要实现霍曼转移,飞行时间不可小于4.14 h,或者,初相角不可大于18.2°。

表1 朗伯特解用于空间交会飞行的算例[4]Table 1 Numerical examples of Lambert solution for space rendezvous
2.2 实用工程设计方法
2.2.1 转移轨道
霍曼转移最初是研究两个圆轨道(初始轨道与目标轨道)之间的双冲量切向转移,其基本原理可推广到一般椭圆轨道转移的情况,即,在轨道近地点或远地点沿轨道速度方向施加切向冲量。因此,不同于上述朗伯特问题,这里先不限定初相角( θ0)、末相角( θe)、飞行时间(T),而按下列次序处理问题:①首先考虑过程约束条件(主要是地面测控条件),按近地点/远地点切向冲量原则,设计转移轨道(包括转移轨道的条数,转移轨道高度,以及在各转移轨道上的飞行圈数等);②进而研究各转移方案的总飞行时间与初相角,以及适合初相角的发射日子与目标航天器的轨道调整要求;③最后进行轨道转移方案比较、选择与优化。事实上,初轨以及每次升高后的轨道,都可视为“调相轨道”。通常在初始轨道与目标轨道之间取一个高度适中的调相轨道,作为飞行时间(圈数)较长的“主调相轨道”。主调相轨道不宜过低,也不宜过高;过低的大气阻力大,过高的调相力度小。
表2对初轨与目标轨道分别为200 km与400 km高的圆轨道,给出4种典型的轨道转移算例,分别含2次、3次、4次冲量机动。算例3与算例4为常用的4冲量机动,头2次机动用于初轨向主调相轨道的转移,后2次机动用于主调相轨道向目标轨道的转移。算例3的主调相轨道为椭圆轨道(250/350 km),算例4的主调相轨道为圆轨道(300 km)。
表3中,初轨为近地点 200 km、远地点300 km的椭圆轨道,目标轨道为400 km高的圆轨道。算例1直接由初轨远地点转移到目标轨道;算例2的转移含300 km高的圆轨道;算例3的转移经3条椭圆轨道。
圆形调相轨道的长处在于:下一次变轨冲量不受轨道位置的限制,不必限定调相轨道飞行圈数为半圈的奇数倍。在主调相轨道的飞行中可设定1次轨道修正机动。由表2与表3可见,这种近地点/远地点的切向转移策略设计方便,总速度增量一样。追踪飞行器在目标轨道进入逼近段后,还要施加多次小冲量机动,向目标飞行器逼近。
2.2.2 发射机遇
从轨道设计的角度考虑,制约发射机遇的主要条件为:①轨道共面,即追踪飞行器发射后直接进入目标飞行器的轨道面;②初相角可实现所要求的交会飞行时间。这意味着,在共面发射时刻,初相角应落在所设定的范围内,在此范围内,追踪飞行器可在限定的飞行时间内与目标飞行器完成交会飞行。对一般的倾斜轨道,追踪器每天有两次共面发射的机会,一次为降段发射(东南向),一次为升段发射(东北向)。若发射方位限定(东南向或东北向),则每天有一次共面发射的机会。因此,问题在于追踪器共面发射时,初相角是否在适合的范围内:①若目标器与追踪器从同一发射场在相隔几天的时间内发射,可通过目标器轨道周期的选择获得所需的初相角;②对同一目标器(空间站)的例行的密集访问,目标器轨道一般不可能正好提供适合来访追踪器的初相角,因此,适合的初相角的获得,需通过追踪器发射日子的选择,以及对给定发射日子的目标器轨道周期的调整。
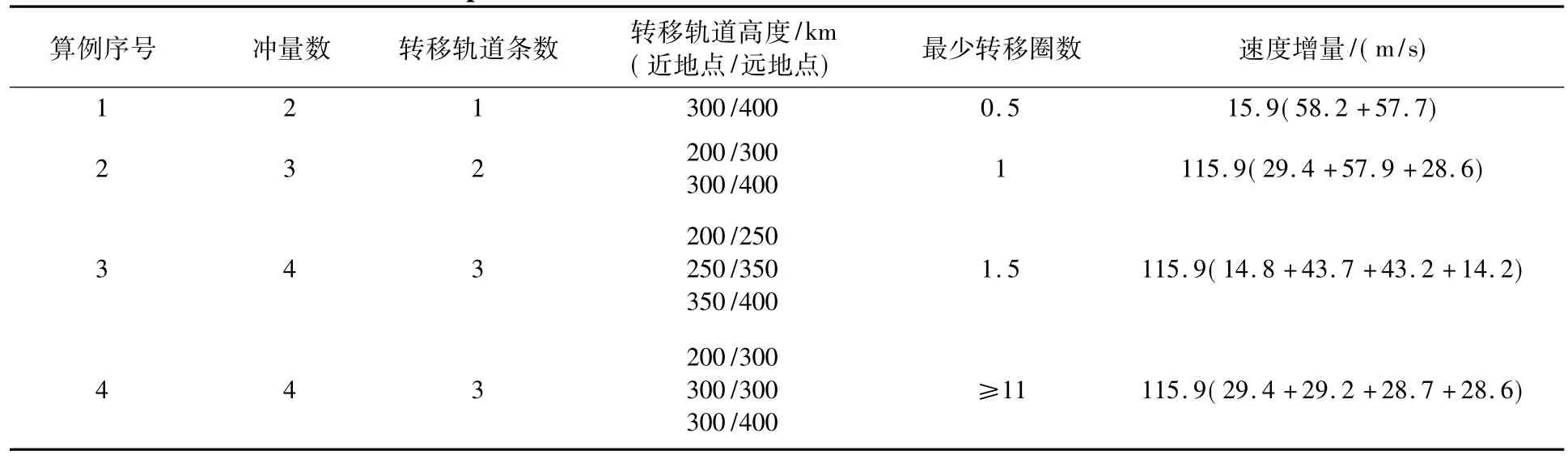
表2 高度200 km圆轨道向400 km圆轨道转移的算例Table 2 Numerical examples of orbital transfer from 200 km circular orbit to 400 km circular orbit
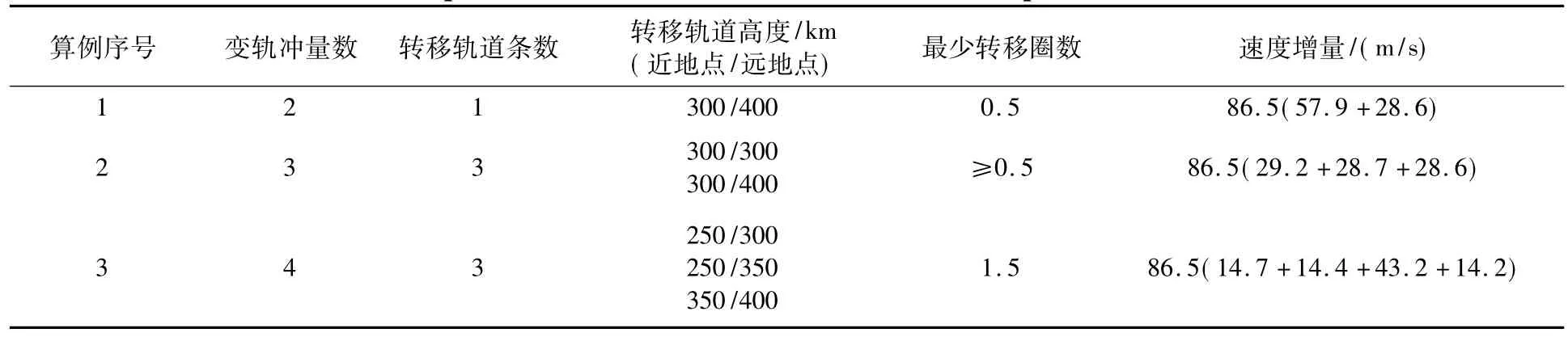
表3 高度200/300 km椭圆轨道向400 km圆轨道转移的算例Table 3 Numerical examples of orbital transfer from 200/300 km elliptic orbit to 400 km circular orbit
若目标飞行器设计为回归轨道,可为追踪飞行器发射时间的选择提供方便。回归轨道具有“星下点回归”与伴随而来的“相位角回归”的特性,在对地观测与交会对接使命中被广泛应用。回归轨道设计可应用初等数论方法,包括确定回归周期(回归天数与回归圈数)与轨道周期之间的关系,以及星下点轨迹圈的排序[21]。若空间站的回归周期为3天,对于2天或3天的的交会飞行方案,交会飞行时间有较大的调整余地,从而所对应的初相角较大,范围也较宽,约为170°~320°[1]。若追踪器推迟1天发射,则初相角增加120°;若2天后发射,初相角增加240°;若3天后发射,初相角增加360°,即回到原值。因此,原初相角范围(170°~320°)中,适合推迟1天发射的部分为170°~200°(发射时的相位角为290°~320°),适合推迟2天发射的部分为290°~320°(发射时的相位角为170°~200°)。然而,对于4圈快捷交会,初相角较小,范围也较窄,约为20°~40°[1],一般情况下,只能推迟一个回归周期才有再次发射机会。
2.2.3 初相角与飞行时间
快捷交会的关键问题是,较小的初相角选择的可能性以及对应初相角的较短的交会飞行的可行性,即:①在共面发射的约束下,初相角是否可较小;②交会飞行(含调相点火与轨道修正机动)是否可在对应初相角的(较短的)时间区间(即较少的轨道圈)内完成。
若目标飞行器与追踪飞行器由同一发射场发射,较小的初相角不难获得,只要目标器的轨道周期适当偏移回归轨道对应的轨道周期,追踪器便可在回归天数后发射。对于接受多艘飞船访问的大型空间站(如ISS)使命,可对选定的发射日,通过目标飞行器轨道周期调整的方法获得适合的初相角。
至于交会飞行时间能否缩短,主要取决于在满足交会飞行的轨道精度要求前提下,系列调相机动能否在较短的时间段内执行。对这一条件,交会飞行时间越短,实现的难度越大。快捷交会飞行时间以2圈(约3 h)至4圈(约6 h)为宜。短于2圈可能导致变轨速度增量显著增加[4];不长于4圈,可使乘员在感到失重难受后的短时间内进入空间站[2]。因此,快捷交会需要:①追踪飞行器初轨精度高,头1次或头2次变轨可由程控执行;②追踪飞行器轨道测定与轨道机动精度高,可免去中途轨道修正;③最终逼近与对接段飞行可不在地面测控范围内,完全由追踪飞行器自主执行。为此,快捷交会对下列系统的性能提出更高的要求:①发射飞行器运载火箭的制导、导航与控制系统;②飞行任务的测控通信系统;③自主交会测量与控制系统。
3 “进步”号/“联盟”号飞船与ISS的交会对接
3.1 运载火箭及国际空间站对接口
进步M序列货运飞船的运载火箭为“联盟-U”,入轨精度如下:高度10 km,轨道周期6 s,轨道倾角2"(angular min)[22]。联盟TMA序列载人飞船的运载火箭为“联盟-FG”,轨道周期精度为22 s[5,23]。先进的“联盟-2”(Soyuz-2)火箭不久将完全替代“联盟-U”与“联盟-FG”火箭。“联盟-2”火箭的特点是:①新电子器件;②数字控制系统;③惯性测量系统;④火箭第3级应用新型发动机(比冲增加);⑤入轨精度提高,轨道周期偏差为± 4 s[5,24]。
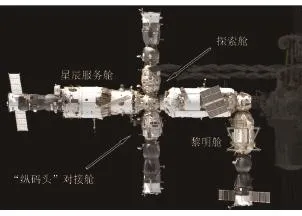
图1 国际空间站俄罗斯轨道模块段[8,9]Fig.1 Russian orbital segments of the international space station
“进步”号/“联盟”号飞船与国际空间站(ISS)交会对接的逼近段飞行,与飞船在ISS的对接口方位有关。“进步”号/“联盟”号飞船在ISS有4个对接口(参见图1):①“对接间1”(Docking Compartment 1,DC1),即“栈桥(纵码头)”对接舱(Pirs Docking Module),进步 M-16M与进步 M-18M的对接口;②“星辰服务舱”(Zvezda Service Module)后对接口,进步M-17M的对接口;③“小型研究舱2”(Mini Research Module 2,MRM2),即“探索舱”(Poisk Module),联盟TMA-08M的对接口;④“小型研究舱1”(Mini Research Module 2,MRM1),即“黎明舱”(Rassvet Module)天底港(面向地球),联盟 TMA-09M 的对接口[8,9]。对空间站上不同的对接口,追踪飞行器(飞船)在逼近段的飞行程序与轨迹有所不同。
3.2 传统的2天交会飞行程序
传统的2天(34轨道圈)交会飞行程序可划分为下列 4 个阶段(参见图2)[5,6,25]:
1)发射段。第1圈,飞船从发射场发射,进入初始轨道(轨道高度 Hmin=200 km,Hmax=242 km,周期 P=88.64 min,倾角 i=51.6°)。
2)调相准备段。①第2圈,船上制导、导航与控制(GNC)系统检测,MCC-M应用地面站测量资料测定轨道,并计算头2次调相点火(M1、M2)参数。②第3圈与第4圈,地面站向飞船上传调相点火参数,发送点火指令;飞船执行调相点火(M1、M2),进入“主调相轨道”。
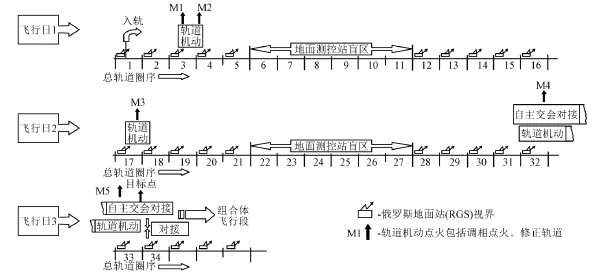
图2 联盟-TMA飞船传统2天调相策略的时间线[5]Fig.2 Timeline of the Soyuz-TMA two-day phasing strategy
3)主调相段(漂移段)。主调相轨道为共椭圆轨道(与目标飞行器轨道共面、同心),从第4圈M2点火后,直至总第32圈“终段起始”机动(M4)点火前,共29圈。飞船在主调相轨道运行的主要事件有:①第1飞行日第6圈至第11圈,以及第2飞行日第6圈至第11圈(总第22圈至总第27圈),飞船在地面测控范围之外的盲区共12圈;在其余17圈,飞船均处于地面测控范围内。②在第1飞行日第12圈至第16圈,测定轨道并计算状态矢量;在第2飞行日第1圈(总第17圈)上传更新的状态矢量,飞船自主执行中途轨道修正机动(M3)。③在第2飞行日第12圈至第15圈(总第28圈至总第31圈),测定轨道并计算状态矢量;在第2飞行日第16圈(总第32圈)上传更新的状态矢量。④在第2飞行日第16圈(总第32圈)与第3飞行日第1圈(总第33圈),飞船自主执行M4与M5机动,将飞船转移到空间站的邻近区域。
4)逼近段(终段)。逼近段从“终段起始”机动(M4)开始,直至第3飞行日第2圈(总第34圈)飞船与国际空间站对接。在逼近段,飞船依据交会敏感器提供的相对状态信息,通过一系列机动,转移到对接轴。
对传统的2天交会飞行程序的分析可见:①交会飞行机动包括4次调相机动(M1与M2,M4与M5)与1次中途修正机动(M3);②削减主调相段飞行圈数,可显著缩短交会飞行时间;③将调相机动M1与M2的点火时刻前移一圈,且免去中途修正机动(M3),便有可能在4至5圈内,密集执行调相机动(M1、M2、M4、M5),完成交会对接。
3.3 俄罗斯飞船与ISS的快捷交会
3.3.1 快捷交会条件[1,5]
对于飞船与ISS的快捷交会,飞船须适应、配合在轨飞行的空间站,空间站也需进行轨道调整。此外,快捷交会的设计还需考虑在出现不测事件时,如飞船发射推迟或突发的ISS“碎片避撞机动”等,可在发射前回到传统的2天交会飞行程序。
现在,“联盟”号/“进步”号飞船的快捷交会能够实现,主要基于下列3项措施。①精准入轨:精确的初轨使飞船在入轨后第1圈还不可能获得实测轨道参数的情况下,也可由程序控制执行头2次调相机动点火;②全自主轨道修正点火:联盟TMA-M与进步M-M拥有最先进的“完全数字飞行控制系统”(Entirely Digital Flight Control System),飞船自身可实现全自主轨道修正点火(无需在过站时实施),从而可缩减交会飞行圈数;③ISS轨道调整:精确调整空间站的轨道,使空间站在飞船的共面发射时刻处于适合快捷交会的轨道位置。此外,精确轨道射入与精确的轨道机动,使免除途中轨道修正机动成为可能,有利于实现快捷交会飞行。对快捷交会,飞船自主执行调相点火是必要的,这是因为:①调相点火在俄罗斯地面站(RGS)视界外执行,不能等到再次飞经RGS的时间;②与具有“跟踪和数据中继卫星”(Tracking and Data Relay Satellites,TDRS)的美国不同,目前,俄罗斯仅可在飞行器飞经RGS时与飞行器通信。功能类似US TDRS的新型的俄罗斯Luch-5中继卫星系统,在几年后才能投入使用。
3.3.2 “进步”号飞船的快捷交会飞行[1,5,10-13]
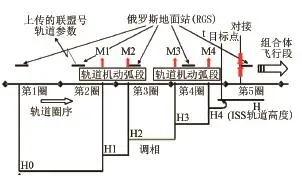
图3 “进步”号飞船的4圈交会飞行方案[1,5]Fig.3 Progress spacecraft four-orbit rendezvous profile
计划的4圈交会方案应用四冲量机动转移策略(图3):①飞船在ISS轨道平面内入轨;②在第2圈的俄罗斯地面站(RGS)测控范围内,实测轨道参数被上传到船上计算机,用于计算头2次轨道机动(M1、M2)点火参数;③在第3圈的RGS测控范围内,地面将接收到的调相点火执行后的遥测信息与地面计算结果进行比较,并由此作出轨道机动M3与M4;M4为逼近段起始机动,将飞船引至空间站领域;④飞船交会段飞行的4次轨道机动(M1、M2、M3、M4)均不在 RGS测控弧段内,由船上自主执行;⑤在逼近段,根据空间站上的对接口方位,还需施加几次轨道机动,飞船绕飞到两边对接轴可对齐的位置;⑥飞船与ISS的对接在第5圈开始的RGS作用范围内。
2012年8月1日,俄罗斯货运飞船进步M-16M由联盟-U火箭从位于哈萨克斯坦的拜科努尔发射场发射,飞向国际空间站。起飞后约9分钟,飞船从联盟-U火箭的第3级分离,进入轨道。分离前,火箭/飞船是按标准轨迹飞行的。飞船入轨后,飞经“俄罗斯地面站”(RGS),RGS将实测轨道参数上传给进步M-16M,供船上计算并执行4次调相点火中的头2次。在轨飞行4圈后,即发射后约6 h,进步M-16M飞船成功对接ISS俄罗斯舱段“对接间1”的“栈桥(纵码头)”对接口。
此后,“进步”号货运飞船又成功进行了两次快捷交会飞行。进步M-17M于2012年10月31日成功发射并对接ISS“星辰服务舱”。进步M-18M于2013年2月11日发射,成功对接“栈桥(纵码头)”港口。进步M-19M原定2013年4月22日发射,采用6 h的快捷交会飞行;但由于与联盟2-1A使命冲突,推迟到4月24日发射,采用传统的2天交会方案,对接在“星辰服务舱”。
3.3.3 “联盟”号飞船的快捷交会飞行[2,15-19]
“联盟”号载人飞船的入轨点高度为Hmin=200 km,Hmax=242 km,初轨周期88.64 min,轨道倾角51.6°。2013年3月29日,联盟 TMA-08M发射,这是“联盟”号载人飞船的首次ISS使命快捷交会飞行。此前,2013年3月21日,一艘已和ISS对接的无乘员货运飞船的推力器点火,提升空间站轨道高度约4.8 km,空间站进入交会轨道。联盟TMA-08M入轨后即开始交会运作,程序如下:①在第1圈,飞船执行头2次程控调相机动(即轨道机动参数在发射前装定,入轨后无需实测轨道参数注入);②在第2圈,实测轨道参数从俄罗斯地面站上传到飞船;③应用实测轨道参数,飞船在其后的5 h飞行中又执行了8次轨道机动点火(包括逼近段机动)。发射后5 h 45 min,飞船成功对接ISS“探索舱”。联盟TMA-09M于5月29日发射,飞行5 h 39 min后与ISS对接。同联盟TMA-08M一样,联盟TMA-09M入轨后第1圈执行头两次调相点火,点火参数是在飞船发射前预先装定在船上计算机的。在第2圈,实测轨道参数从俄罗斯地面站上传到飞船,供后面的5个小时执行8次轨道机动点火之用。
4 结语
快捷交会大大缩短了追踪飞行器从发射到对接的飞行时间,不仅对乘员有益,也有利于应急运输与空间救援任务。从长远看,快捷交会将逐步成为来访飞行器与空间站交会对接例行飞行的首选方式。对于快捷交会,追踪飞行器的调相段飞行时间相应缩短(调相圈数减少),而发射段与逼近段的飞行程序一般不作改变。快捷交会的关键技术包括:①发射飞行器的射入精度;②追踪飞行器的快速轨道测量与轨道控制精度;③追踪飞行器的自主计算、自主机动与自主交会能力;④目标飞行器的轨道调整精度;⑤对应快捷交会的对接段测控条件。
[1]Murtazin R,Petrov N.Short profile for the human spacecraft Soyuz-TMA rendezvous mission to the ISS[J].Acta Astronautica,2012,77:77-82.http://www.sciencedirect.com/science/article/pii/S0094576512000914
[2]Stuart Williams.New crew takes express ride to space station[EB/OL].2013[2013].http://www.google.com/hostednews/afp/article/ALeqM5h05hJUBJoEMbIfTzmX0a9OgikHlw?docId=CNG.f85e5854bf7734842f2130a889c477e7.2a1
[3]戚发轫,朱仁璋,李颐黎.载人航天器技术[M].第二版.北京:国防工业出版社,2003:55-59.
[4]朱仁璋.航天器交会对接技术[M].国防工业出版社,2007:37-53.
[5]Murtazin R F,Budylov S G.Short rendezvous missions for advanced Russian human spacecraft[J].Acta Astronautica,2010,67(7):900-909.
[6]Woffinden D C,Geller D K.Navigating the road to autonomous orbital rendezvous[J].Journal of Spacecraft and Rockets,2007,44(4):898-909.
[7]MKC. Прогресс М-11М[R/OL].2011[2013].http://www.mcc.rsa.ru/progress_m11m.htmA
[8]Russian orbital segment[EB/OL].http://en.wikipedia.org/wiki/File:Russian_Orbital_Segment.png
[9]STS-135 Shuttle Mission Imagery[EB/OL].http://spaceflight.nasa.gov/gallery/images/shuttle/sts-135/html/s135e011857.html
[10]Pete Harding.Progress M-15M re-dock to ISS to test new antenna hardware aborted [EB/OL].2012[2013].http://www.nasaspaceflight.com/2012/07/progress-m-15m-re-dockiss-test-of-new-antenna-hardware/
[11]Pete Harding.Progress M-16M successfully tests new fast rendezvous with ISS[EB/OL].2012[2013].http://www.nasaspaceflight.com/2012/08/progress-m-16m-launch-test-newfast-rendezvous-iss/
[12]Anatoly Zak.Progress M-16M,Progress M-17M,Progress M-18M,Progress M-19M[EB/OL].2013[2013].http://www.russianspaceweb.com/progress_m_0m.html#2
[13]Chris Bergin,Pete Harding,William Graham.Progress M-19M docks with ISS despite antennaissue[EB/OL].2013[2013].http://www.nasaspaceflight.com/2013/04/soyuzu-progress-m-19m-iss/
[14]Pete Harding.The Soyuz TMA-07M Santa Sleigh docks with ISS[EB/OL].2012[2013].http://www.nasaspaceflight.com/2012/12/soyuz-tma-07m-three-new-crewmembers-iss/
[15]Soyuz TMA-08M[EB/OL].2013[2013].http://en.wikipedia.org/wiki/Soyuz TMA-08M
[16]Fast Track to Space[EB/OL].2013[2013].http://blogs.esa.int/luca-parmitano/tag/soyuz/
[17]Victoria Jaggard.Speedy astronauts make fastest trip yet to the ISS[EB/OL].2013[2013].http://www.newscientist.com/blogs/shortsharpscience/2013/03/speedy-astronauts-makethe-fas.html
[18]Chris Bergin,Pete Harding,Soyuz TMA-09M docks to ISS following short cut rendezvous[EB/OL].2013[2013].http://www. nasaspaceflight. com/2013/05/soyuz-tma09-quick-trip-dock-iss/
[19]Chris Bergin,Pete Harding.Soyuz TMA-09M quick trip dock ISS[EB/OL].2013[2013].http://www.nasaspaceflight.com/2013/05/soyuz-tma09-quick-trip-dock-iss
[20]朱仁璋,王鸿芳,徐宇杰.航天器交会轨迹分类研究[J].载人航天,2012,18(3):8-17.
[21]朱仁璋.卫星循环轨道与覆盖轨道的设计[J].宇航学报,4(3):22-29.
[22]Soyuz U Launch Vehicle[EB/OL].2013[2013].http://www.tsenki.com/en/launch_services/help_information/launch_vehicles/view/?SECTION_ID=149&ELEMENT_ID=86333 Center for Operation of Space Ground-Based Infrastructure
[23]Soyuz FG Launch Vehicle[EB/OL].2013[2013].http://www.tsenki.com/en/launch_services/help_information/launch_vehicles/view/?SECTION_ID=149&ELEME
[24]Soyuz-2 Launch Vehicle[EB/OL].2013[2013].http://www.tsenki.com/en/launch_services/help_information/launch_vehicles/view/?SECTION_ID=149&ELEMENT_ID=86229 Center for Operation of Space Ground-Based Infrastructure
[25]朱仁璋,王鸿芳,肖清,等.苏/俄交会对接技术研究[J].航天器工程,2012,20(6):16-31.
[26]朱仁璋,王鸿芳,丛云天,等.中外交会对接技术比较研究[J].航天器工程,2013(3):8-15.
猜你喜欢
当代水产(2022年3期)2022-04-26
新高考·高一数学(2019年4期)2019-09-07
电子技术与软件工程(2018年10期)2018-07-16
速读·中旬(2018年4期)2018-04-28
电子制作(2018年1期)2018-04-04
爆炸与冲击(2017年1期)2017-04-10
江苏农业科学(2016年5期)2016-07-23
读写算·教研版(2016年10期)2016-06-08
读写算·教研版(2016年6期)2016-03-28
