基于CCD视觉的线缆识别技术
2014-12-14 07:08刘军,刘超
重庆理工大学学报(自然科学) 2014年2期
刘 军,刘 超
(江苏大学汽车与交通工程学院,江苏镇江 212000)
电源线(接插端子)加工在机械加工制造业领域有着巨大的市场。目前国内比较成熟的生产线在裁线、剥皮、打端子、PVC封装等重要工序中都能实现较高程度的自动化,但由于缺少将线束智能识别并压分至指定加工流道的技术,使得电源线加工的高集成度自动化无法实现。国际上相关企业和传感器供应商为此类案例进行的设计尝试,但均存在造价昂贵、难以维护和对不同来料的兼容性不佳等缺点。
目前解决颜色识别主要采取CCD视觉方案,线缆线束识别的难点主要包括以下几个方面:
1)出于精简和缩短生产线的考虑,要求在一个工站中完成对整束线芯线分布情况的观察,并按指定的顺序旋转线束,以利于后续工序中一次性压装到位。因此,对实际成像的效果不仅要求每根芯线都能有较好的光照度,而且要考虑不同颜色芯线之间的相互干扰。
2)线材是圆柱状的,因此正确处理其镜面边缘(specula’s edges)和遮挡边缘(occlusion edges)[1]给图像处理带来一定的难度。
3)三芯线不仅有单色的蓝色、黑色需要识别,作为地线的黄绿双色线也给系统识别带来困难。
4)芯线和橡胶外皮间的滑石粉对图像质量会产生影响。
5)芯线的缠绕曲张程度的随机性会给系统带来随机误差。
1 系统组成
系统由刷粉单元、图像识别单元、机械纠正单元和PLC通讯单元组成。工作流程如图1所示。
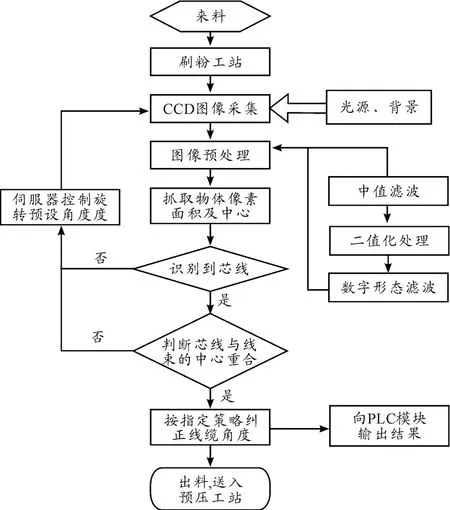
图1 系统工作流程
1.1 刷粉单元
电机带动齿轮减速机,控制2个刷头分别做顺时针和逆时针的高速转动,以达到基本除去芯线表面粉尘的目的。经试验,80%以上的表面粉尘都能被很好地去除。
1.2 图像识别单元
包含工业CCD、图像采集卡、图像处理计算机、光源和背景。CCD选型的出发点是处理速度快,帧数高,而在像素级别和视场大小上则无需太高的要求。本系统采用东芝Teli CleverDragon系列相机。光源选择方面,由于被测线材的特殊性,需要尽可能除去芯线重叠部分的阴影,并且对圆柱表面投上柔和的正光,故采用碗状光源或环形光源。
1.3 机械纠正单元
包含夹爪、气缸、伺服器、电机、PLC模块。用一组气缸控制夹线夹爪的关闭和打开,一组高精度高速伺服控制器和电机控制旋转角度。PLC模块用于实现和上位机的通讯、接收和返回指令。
2 图像处理与识别相关技术
2.1 颜色空间
颜色空间按基本结构可分两大类:基色颜色空间和“色”、“亮”分离颜色空间。前者的典型是RGB和 CMY、CMYK、CIE XYZ等;后者包括 HSL、YCC/YUV、Lab,以及一批“色相类颜色空间”。
在计算机技术及CCD视觉方案中,使用最广泛的彩色空间是RGB(图2)彩色空间(RGB color space),它建立在加性混合3种基色R、G、B的基础上。基色在绝大多数情况下是图像传感器的“参考色”,它们构成三维正交(彩色)矢量空间的基矢量,其中零矢量代表黑色。在RGB空间,任何彩色都可以看作基矢量的线性组合。但是将RGB颜色空间引入本系统有很多不合适的地方。首先,它的细节难以进行数字化的调整,它将色调、亮度、饱和度3个量放在一起表示,很难分开;其次,由于在蓝色和绿色2个分量上产生过多的颜色细节,因此很容易在辨识电源的黄绿线和蓝线时造成误判。
本系统采用HSL(图3)颜色模型。在HSL模型中,H定义颜色的波长,称为色调(Hue);S定义颜色的强度(intensity),称为饱和度(Saturation);L定义掺入的白光量,称为亮度(lightness)。由于人的视觉对亮度的敏感程度远强于对颜色浓淡的敏感程度,因此HSL颜色空间比RGB色彩空间更符合人的视觉特性[2]。图像处理和计算机视觉中的大量算法都可在HSL色彩空间中方便地使用,它们可以分开处理且是相互独立的。由于黄色和绿色在色环上处在相邻的位置,故可以通过限制Hue的上下限准确地将黄绿色识别为一种颜色。但是HSL色彩空间仍有一个缺陷,就是在判断黑色芯线的时候,由于黑色不具有hue信息,只能依靠限定的低亮度和低饱和度来完成识别,所以在保证正确率的同时必然降低了识别率。
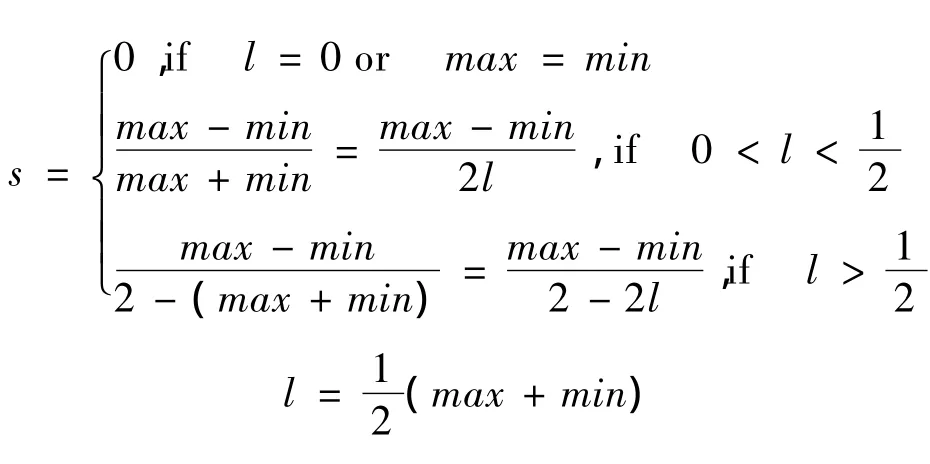
HSL色彩空间和RGB色彩空间只是同一物理量的不同表示法,因而它们之间存在着转换关系。在RGB到HSL的转换中,设(r,g,b)分别是一个颜色的红、绿和蓝坐标,它们的值是0到1之间的实数。设max等价于r,g和b中的最大者,min等于这些值中的最小者。要找到在HSL空间中的(h,s,l)值,这里的 h∈[0,360)是角度的色相角,而 s,l∈[0,1]是饱和度和亮度,则:
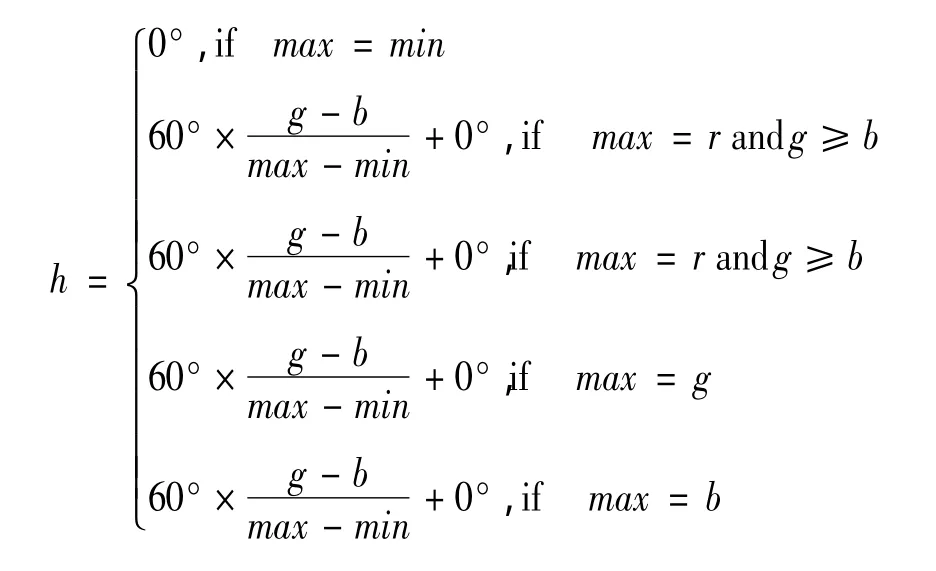
其中h的值通常规范化到0°到360°之间,而 h=0用于max=min(即灰色)时。
2.2 中值滤波
引入中值滤波的原因是刷粉工站虽然去除了大部分滑石粉,但是仍然会残留无法去除的粉尘以及CCD成像得到的噪点,需要在图像识别前进行过滤。
中值滤波器由于具有平滑图像时保持边缘的特征而常用于灰度图像,是一种非线性的算子,它对一个局部窗口中的像素根据其灰度进行排列,并用序列中部的像素替换窗口中心的像素。将标量中值滤波的概念扩展到彩色图像处理过程中,由于缺少一种“自然”地排列矢量的概念,彩色失真和边缘保留特性的丢失都可能发生。如果要同时考虑所有3个彩色分量,那么就要确定彩色矢量序列的顺序[3],以定义是否一个矢量比另一个矢量大。
考虑到实用性和准确性,在几种已提出的彩色图像中值滤波技术中,系统采用了用于HSI空间的色度的中值滤波器[4]。由于在色度平面搜索均值,因而保证了输出图像的值与输入图像里特定窗中的值相同。这种方法可看作上述矢量中值的一种变形,仅工作在色度平面上。色度定义为一个复函数,其中,色调t(x,y)看作相位而饱和度s(x,y)看作绝对值。计算色度图像b(x,y),其实部R和虚部I可借助欧拉公式计算:
色度 b(x,y)可定义为

搜索窗中与其他像素的平方距离最小的像素,在输出图像中,确定该像素的色度。对一个尺寸为m×n的窗,k=mn,像素i到像素j的欧氏平方距离为

其中:1≤I;j≤k。像素i到所有其他像素的平方距离和为
如果一个像素的色度满足d2=min{},则该像素被选入输出图像。与矢量中值类似,这个最小值并非总是无歧义的。如果多个像素满足上述条件,那么就选取与原始值最接近的色度值。选取一个粉尘较多、噪点较大的图像做Median3x3预处理,结果显示观测区域的很多白点及噪声得到消除,如图4所示。
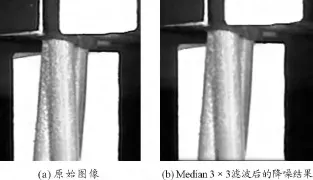
图4 图像做Median3x3预处理
2.3 彩色图像二值化处理
将彩色图像转换为只有黑色和白色2个颜色的图像,称为图像的二值化。二值图像比彩色图像或者灰度图像更容易处理,可以减少大量的计算,从而节省程序运算时间。
传统的图像二值化处理主要是将灰度图像按设定的阈值进行全局或局部的处理。灰度图像的单阈值二值化处理扩展到彩色图像的多阈值二值化处理需要用到之前的HSL颜色空间。所谓的多阈值[5]就是通过H、S、L 3个分量来分别确定图像处理的阈值,然后将处理结果叠加以达到对图像二值化处理的目的。
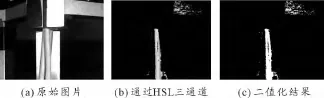
图5 图像的二值化
2.4 形态滤波
形态滤波的引入来自图像边缘的识别要求。图像中的边缘由图像函数的不连续性刻画。由于场景中几何和光度的不同,边缘的产生可有完全不同的原因。
镜面边缘(specula’s edges)或高光边缘(highlight edges)源于光源和物体表面之间的特殊朝向,也与物体材料性质有关。在实际生产过程中,表现为如图6所示的特征。

图6 棕色芯线上表现出的高光边缘
遮挡边缘(occlusion edges)是指目标和背景间由观察者看到的边界。遮挡边缘并不代表场景中的物理边缘,他们的存在性取决于特殊的观察位置。由于两芯线之间的入射光强度的不一致性,导致其遮挡边缘不能呈现清晰的界线,同时由于线材具有一定的反射特征,颜色容易互相映衬和叠加,导致二值化后的图像边缘不是很平整,为后续的位置计算带来困难。
数学形态滤波的基本操作是腐蚀(erosion或Minkowski减法)和膨胀(dilation或 Minkowski加法)。它们可成功消除灰度图像中的噪声[6]。在形态学中,结构元素是最重要和最基本的概念。结构元素在形态变换中的作用相当于信号处理中的“滤波窗口”。用B(x)代表结构元素,对工作空间E中的每一点x,腐蚀和膨胀的定义为:
腐蚀:X=E⊙B={x:B(x)⊂E}
膨胀:Y=E⊕B={y:B(y)∩E≠φ}
如果直接对彩色图像进行形态滤波,结构元素此时对所有矢量分量都定义为固定的尺寸和形状,那么图像会由于把各个独立的结果合并而产生彩色失真。形态滤波后图像中细节的丢失(在对灰度图像的滤波中就已存在)将会在彩色图像中体现得更为明显。所以本系统在二值化后进行滤波,可以较好地解决这两个问题。分别进行一次闭合(图7)操作与一次开启(图8)操作,两次处理分别实现不同的过滤目标。最后选择采用开启形态滤波器的方式来优化结果。
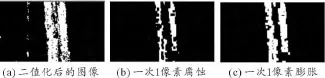
图7 闭合操作

图8 开启操作
3 角度修正单元
图9所示为需求的处理结果,3根芯线呈“品”字形固定于载具中,流入预压工站。
受线材位置的影响,压在下层的芯线无法获得较佳的光照度。经试验,如果同时考察3根芯线,则每种芯线HSL通道难以精确制定,导致极低的识别率和一定的误判率。但若只观察最高点的单根芯线,效果较佳。
受以往设计经验的影响,工程师会为需要进行颜色分析的点设定极小的“感兴趣的区域”(region of interest)。当该区域填充满预设量的像素点时,判断被测物体已达到目标位置。
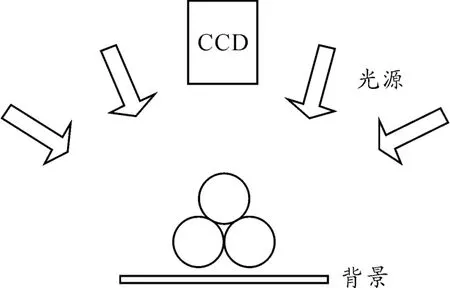
图9 流出工站时需求的结果
受制于线材性质的影响,芯线在镜头下的绝对位置并不是很固定,无法通过芯线在影像中的坐标来准确推断芯线的实际高度,进而导致之后的角度校准效果偏差较大。日本某品牌传感器公司为类似案例提供了加载一个高度传感器的解决方案,即当判断传感器返回的最高点达到拐点(峰值)时,可以对ROI进行采像处理。
由于之前优质的图像过滤效果,本系统采用对单芯线和整线束分别进行特征分析、计算比对两者中点的方式,判断芯线达到最高点的位置。此方案可以有效包容线缆因随机偏离视场中心造成的无法识别的情况,且减少了元器件的数量,提高了系统的稳定性。
4 结束语
对软性材料的加工制造是自动化产业中的一个难点。而彩色CCD视觉方案多用于判断已定义的规范物体的有无和一些简单的颜色判别,对于外界环境较恶劣、被测物体相互间干扰较大的情况,则需要更多的图像处理技术和优化算法作为辅助。本系统基于HSL颜色空间理论,合理融合了中值滤波、图像二值化、数学形态滤波等彩色数字图像处理技术,对电源线自动化生产中的三芯线识别进行了探索性研究,并完成了基于CCD视觉的硬件和软件的设计,对光照、环境和线材来料实现了较好的兼容性,为线缆类及相关产品自动化生产的研究和发展提供了宝贵经验。
[1]余见.彩色图像边缘检测和分类[D].厦门:厦门大学,2008.
[2]Koschan,Andreas,Abidi M.Digital color image processing[Z].Wiley-Interscience,2008.
[3]张旭明,徐滨士,董世运.用于图像处理的自适应中值滤波[J].计算机辅助设计与图形学学报,2005,17(2):295-299.
[4]Frey,Herbert.Digitale bildverarbeitung in farbrflumen[Z].1988.
[5]王星,刘金义.基于HIS的彩色图像二值化技术研究[J].科学技术与工程,2011(7):1671-1815.
[6]Serra,Jean.Image analysis and mathematical morphology[M].London:Academic Press,1982.
猜你喜欢
铁路通信信号工程技术(2020年3期)2020-04-04
电子制作(2019年16期)2019-09-27
铁道通信信号(2018年6期)2018-08-29
智能城市(2018年7期)2018-07-10
中国生物医学工程学报(2017年6期)2017-02-10
文物保护与考古科学(2016年4期)2016-05-17
现代农业(2016年6期)2016-02-28
东北电力大学学报(2015年1期)2015-11-13
冶金与材料(2015年3期)2015-08-20
质谱学报(2015年5期)2015-03-01