PWM变频器与异步电动机系统的建模与仿真
2015-01-04 06:24黄费涛付泽斌
船电技术 2015年9期
黄费涛,荣 军,周 磊,罗 超,付泽斌
(湖南理工学院信息与通信工程学院,湖南岳阳414006)
0 引言
异步电动机具有使用方便、体积小以及成本低等优点,广泛应用于各行各业[1,2]。对于异步电动机的调速控制系统设计一般通过改变电压或者改变频率,对于电压的改变一般采用直流斩波电路把一种直流可调的电压变成另外一种直流电压,然后再通过逆变器将直流电变成交流电对异步电动机供电,采用这种供电方式整个供电装置比较复杂,而且成本也比较高。对于变频调速,目前最常用的是采用专门的变频装置,其变频器的购买成本远高于电机成本,在单一应用场合,使用成本过高。针对以上两个问题,有没有一种控制装置能够把调压和变频结合起来,既能够增大使用范围,又能节约生产成本[3,4]。因此本文研究PWM变频器-异步电机调速控制,这种控制系统可以将调压和变频结合起来的装置,不但使用方便,而且可以显著降低生产成本,在生产和生活中具有很高的应用价值。
1 PWM 变频器-异步电动机系统的工作原理介绍
PWM 变频器-异步电动机电路主要由 PWM变频电路和异步电动机组成[5],图1所示的电路为PWM变频电路,它主要的作用是产生三相交流电供异步电动机使用。其中图1所示的 PWM变频电路由二极管整流桥,滤波电容和逆变器组成。逆变器的输入为直流电压,通过调节逆变器的脉冲宽度和输出交流电压的频率,既实现调压又实现调频。PWM 变频电路简单,而且还有以下优点:第一简化了主电路和控制电路的结构。由二极管整流器对逆变器提供恒定的直流电压。在PWM逆变器内,在变频的同时控制其输出电压。系统只有一个控制功率级,从而使装置的体积和重量减小,从而也降低了生产成本。第二改善系统的动态性能。PWM 逆变器的输出功率和电压,都在逆变器内控制和调节。因此,调节速度快,调节过程中频率和电压配合好,系统动态性能好[6]。

图1 PWM变频器-异步电动机电路
2 PWM 变频器-异步电动机控制系统在MATLAB/Simulink的建模与仿真
3.1 PWM变频器-异步电动机的仿真模型
PWM 变频器-异步电动机电路在MATLAB/Simulink中的仿真模型如图3所示[7,8],为了方便仿真,在模型中将图1所示的三相交流整流直接用一个550 V的直流电源代替,整流电路直接用直流电源代替不影响其工作原理。因此图3所示的仿真模型实际上主要直流电源 DC、逆变器Universal Bridge、调制器PWM Generator、异步电动机模块及测量模块组成。其中PWM调制参数设置采用内部产生正弦波调制波方式,调制度为0.9,频率为50 HZ。电动机参数设置为电动机电压为380 V,频率为50 Hz,定子绕组Rs为0.68 Ω,定子绕组漏感为0.0042 H,转子绕组电阻 0.45 Ω,转子绕组漏感为 0.0042 H,互感为0.1486 H,转动惯量J为0.05 kg/m2,摩擦系数F为0.0081,极对数为2。
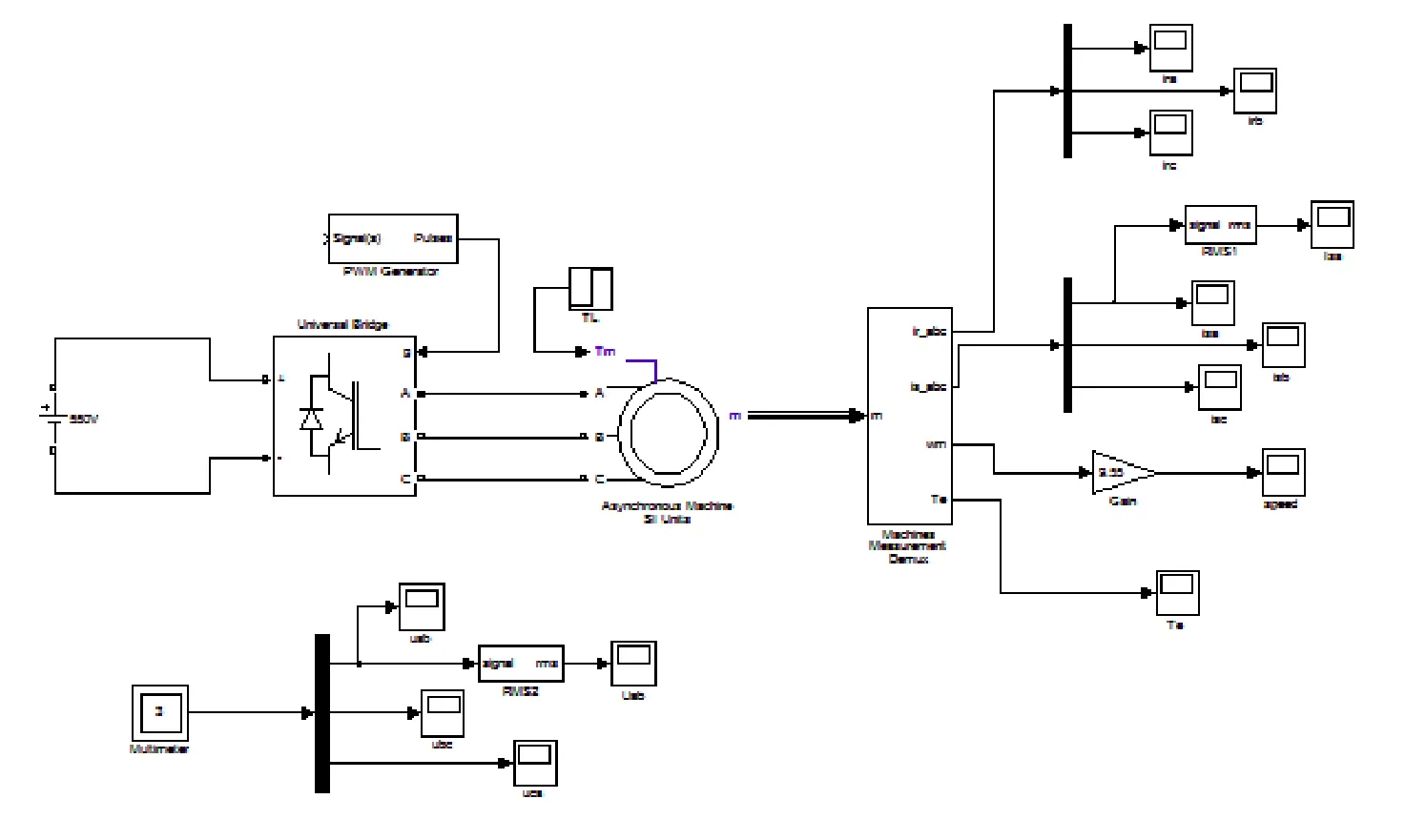
图2 PWM变频器-异步电动机电路仿真模型
3.2 仿真结果及其分析
PWM变频器-异步电动机电路的仿真结果如图3~图7所示。其中图3为逆变器输出电压的线电压仿真波形,从图3(a)、(b)和(c)可以看出550 V的直流电经过三相逆变器后变成了三相交流电,如果通过改变逆变器的6个开关管可以改变其频率和电压波形,从而方便实现变频和变压。图4为异步电动机定子电流的仿真波形,从图4(a)、(b)和(c)可以看出定子电路在刚启动时,电流接近100 V,在0.2 s后电流达到稳定,这与异步电动机直接起动电流比较大相符合。图5为异步电动机转子电流的仿真波形,从图5(a)、(b)和(c)可以看出转子电流在刚起动时,电流比较大也接近100 V,但是在0.2 s后转子平稳运行后,转子电流为零,这是因为转子为空载运行,转速接近定子三相旋转磁场转速,因此转子没有电流。图6为异步电动机转速的仿真波形,从图6可以看出电流波形在0.2 s后达到1500 r/m的转速,其输出波形有点超调,不过很快达到稳定,说明PWM变频器-异步电动机控制系统动态性能比较好。图7为异步电动机转矩的仿真波形,从图7可以看出输出转矩脉动比较大,造成转矩脉动大的原因是由于调制频率和输出频率之比固定的情况下,特别是在低频时,高次谐波影响较大,因而电动机的转矩脉动和噪声都较大,这是 PWM变频器-异步电动机控制系统的一个缺点,在实际应用中应采取措施消除或者减少转矩脉动。

图3 逆变器三相线电压输出仿真波形


图4 异步电动机定子电流仿真波形

3 结束语
本文详细分析PWM变频器-异步电动机控制系统的工作原理,然后在Matlab/Simulink进行对其进行了建模和仿真,最后对其仿真结果进行了详细地分析,通过仿真结果得出 PWM 变频器-异步电动机控制系统具有结构简单,系统稳定及动态性能比较好的优点,同时也指出其具有转矩脉动过大的缺点。

图5 异步电动机定子电流仿真波形

图6 异步电动机转子转速仿真波形

图7 异步电动机输出转矩仿真波形
[1]唐介.电机与拖动[M].高等教育出版社,2007.
[2]彭鸿才.电机原理及拖动[M].北京:机械工业出版社,2001.
[3]王锋,姜建国.风力发电机用双PWM变换器的功率平衡联合控制策略研究[J].中国电机工程学报,2006,26(2):134-139.
[4]王丹,贾石峰.双馈风机中双 PWM 变换器的协调控制策略[J].新特器件应用,2009,11(10):26-29.
[5]苏临亚,黄俊.变频器用于异步电机应注意的设计施工问题[J].冶金动力,2003,98(4):81-82.
[6]刘永顺,李淑平.基于双 PWM 技术的交流变频调速系统[J].继电器,2003,31(10):63-65.
[7]吴慰,黄烜,刘会河.三相交流异步电机控制系统仿真[J].计算技术与自动化,2011,30(4):68-72.
[8]荣 军,李一鸣,万军华.三相异步电动机三种起动方式的比较研究[J].湖南理工学院学报(自然科学版,2015,28(1):50-54.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23