
蛇行机动反舰导弹对抗仿真研究
2015-01-06 06:53范作娥彭文辉吴刚
新型工业化 2015年2期
范作娥,彭文辉,吴刚
(海军潜艇学院 战略导弹与水中兵器系,山东 青岛 266044)
蛇行机动反舰导弹对抗仿真研究
范作娥,彭文辉,吴刚
(海军潜艇学院 战略导弹与水中兵器系,山东 青岛 266044)
为了研究带有末端蛇行机动的反舰导弹的突防效果,建立了反舰导弹蛇行机动弹道模型,应用过载控制理论,设计了反舰导弹质心控制和过载控制信号;通过建立舰空导弹的反导拦截模型,在反舰导弹带蛇行机动和末端无机动两种情况下,对比仿真了舰空导弹与反舰导弹的拦截对抗,仿真结果验证了,带蛇行机动的反舰导弹的突防效果要高于普通的末端无机动的突防效果。
蛇行机动;反舰导弹;对抗仿真;突防
0 引言
随着防空反导武器系统的不断发展,反舰导弹为了突防舰空导弹和“密集阵”火炮等反导武器的拦截,世界各国都在致力于提高反舰导弹的突防能力[1]。而提高反舰导弹突防能力的其中一个重要的技术途径就是机动变轨技术。目前,部分国家的反舰导弹已经具备了一定的末端机动变轨能力,比如俄罗斯的“白蛉”,在距离目标几千米时以3~6m的高度作蛇行规避机动飞行。台湾的“雄风II”,在攻击目标的最后阶段也可以做出蛇行机动[2]。因此,研究带有末端蛇行机动的反舰导弹与敌方舰空导弹的对抗仿真,从而研究末端蛇行机动的突防效果是非常有必要的。
反舰导弹要想实现末端蛇行机动,需要导弹具有足够的机动性来改变飞行速度的大小和方向。导弹的机动性通常用过载来评定,而导弹的过载控制就是通过对导弹的过载直接实现控制,所以它有很强的机动能力[3]。
因此,本文所研究的反舰导弹就是采用过载控制来实现末段蛇行机动的。其控制信号包括过载控制信号和质心控制信号,内环采用过载控制信号,外环采用质心控制信号,两信号互相配合、协调控制,即可控制反舰导弹实现末端蛇行机动弹道。
1 蛇行机动弹道模型
1.1 质心控制模型
[4],反舰导弹的末端机动轨迹是导弹质心相当于地面坐标系Oxyz的运动轨迹,可以根据飞行的距离x进行控制,即末端机动轨迹的参数方程可以以变量x为参数进行描述:

式中,(x1,y1,z1)为反舰导弹进行末端机动的初始位置;ξ0为初始相位角,这里取ξ0=‒π/2;ly、lz、ky、kz、A为末端机动参数,根据不同的机动方式(航向蛇行、纵向蛇行、跃升、螺旋、摆式等)进行选取。ly、lz分别为纵向和航向投影曲线的机动半径;kyπ、kzπ分别为一个机动周期内纵向和航向投影曲线的相位变化值;A称为节距,它是指在一个机动周期内反舰导弹沿地面坐标系Ox轴方向飞行的距离。定义节点数n,它描述的是在末端机动范围内反舰导弹所完成的机动周期数目。假设反舰导弹在飞行到x=x2时停止机动,则有:n=(x2‒x1)/A。
由式(1)可以看出,实际上文献[4]是将反舰导弹的末端机动飞行轨迹给分解成了纵向和航向两个平面上的三角函数,通过选择不同的机动参数来合成不同的末端机动方式。由于本文只研究航向蛇行运动,并不研究其他的末端机动,因此,选取ly=0,也就是反舰导弹在纵向平面上不进行机动,只在航向平面内z随x按余弦曲线周期性地变化,因此,蛇行机动的期望质心轨迹变为:

式(2)就是文章设计的反舰导弹末端蛇行机动的质心控制信号。
1.2 过载控制模型
既然反舰导弹进行末端蛇行机动时其期望飞行轨迹已知,见(1)式,那么,根据导弹位置和过载之间的关系,可以推出导弹进行蛇形机动时,所需要的期望过载。为了简化讨论做如下假设:
假设1:反舰导弹的飞行速度在地面坐标系Ox轴上的投影分量为常数,即Vmx为常数;
假设2:忽略作用在反舰导弹上的各种干扰。
基于上述两个假设条件,对(1)式求导可得在末端机动中反舰导弹的飞行速度分量为:

对(3)式再次求导可得反舰导弹的机动加速度在地面坐标系三个轴上的投影分量分别为:

根据导弹过载定义,是指作用在导弹上除重力以外所有外力的合力与导弹重量的比值,即n=N/G。其中N为作用在导弹上除重力以外所有外力的合力(即控制力)。则导弹在飞行中所受的外力合力为:F=N+G。假设导弹的机动加速度矢量为:a=(N+G)/m。设N在地面坐标系各轴上的投影分量分别为Nx、Ny、Nz,则过载在地面坐标系各轴上的投影分量分别为:
将(4)式代入(5)式得,

式(6)就是地面坐标系下,期望的过载控制信号ny2和nz2,鉴于地面坐标系与弹道坐标系之间的变换关系[5]:

考虑到nx=0,则法向过载控制信号n*y和n*z应设计为:

式(2)和式(8)即为反舰导弹蛇行机动弹道的控制模型,在两者的相互作用下,可以实现反舰导弹的末端机动。需要指出的是,由于本文研究的是反舰导弹与舰空导弹的突防对抗仿真,并不关心反舰导弹能不能打中自身的舰艇目标。因此,本文中反舰导弹只是超目标方向飞行,并不研究其打击精度。
2 舰空导弹反导拦截模型
2.1 相对运动模型
由于反舰导弹蛇行机动是在水平面内进行的,而纵向保持平飞,因此本文只考虑水平面内的航向运动。将反舰导弹和舰空导弹的三维对抗问题在航向平面和纵向平面上对其解耦,则航向平面内两者相对运动关系的几何关系如图1所示[8],相应符号说明如下:
OXYZ:地面坐标系;
(x, y, z)、(xI, yI, zI):反舰导弹M与舰空导弹I的坐标位置;
Rxz:弹目距离; qxz:视线角
v、vI:反舰导弹和舰空导弹的速度;
ψM、ψI:反舰导弹和舰空导弹的弹道偏角,逆时针为正;
ηM、ηI:反舰导弹和舰空导弹的前置角,即各自的速度矢量方向转到视线方向所要旋转的角度,逆时针为正。
图1 舰空导弹与反舰导弹的运动几何关系Fig. 1 Relative motion between ship-to-air missile and anti-ship missile
根据反舰导弹和舰空导弹两者的运动几何关系,见图1,可以建立航向平面内两者运动几何关系:
当x>xI,即拦截导弹尾追反舰导弹情况时,

2.2 制导系统模型
鉴于敌方舰空导弹拦截我方反舰导弹的相关战术决策,我们无法详细判断,故在舰空导弹拦截反舰导弹的建模过程中,作如下假设:
1)敌方舰载雷达总能可靠发现并跟踪进入雷达视距内的反舰导弹;
2)舰空导弹总能被可靠引入并能截获目标;
3)舰空导弹视为可控质点,只考虑质心运动;
4)舰空导弹在飞行中速度保持不变。
基于上述假设,则舰空导弹的质心运动方程如下[6]:

目前约有75%的面对空拦截弹采用PN制导(比例导引),在这些PN制导的拦截弹中,约有70%采用半主动雷达寻的。因此,舰空导弹的导引规律选定为比例导引规律,即保持导弹速度矢量转动的角速度与目标视线转动角速度成一定比例:

式中,N1为舰空导弹的比例导引系数,通常取3~6之间。
2.3 命中判定模型
由于舰空导弹对目标的毁伤取决于引战配合、战斗部威力和反舰导弹的易损性等因素[6]。为分析问题方便,本文在此作简化处理,舰空导弹是否成功拦截反舰导弹,主要是依靠判断脱靶量Rtb的大小,若Rtb≤ Re(Re为舰空导弹战斗部杀伤半径),则认为舰空导弹拦截成功;若Rtb> Re则认为舰空导弹拦截失败,此时反舰导弹成功突防。对于脱靶量的提取方法为:首先是确定两弹的遭遇点,当符号改变发生跳变时,意味着舰空导弹与反舰导弹之间的距离由越来越小开始跳变为越来越大,也就意味着舰空导弹距离反舰导弹越来越远,即舰空导弹脱靶。因此,当符号改变发生跳变时所对应的Rxz即为脱靶量Rtb。
2.4 误差模拟
在研究舰空导弹拦截反舰导弹的抗击过程中,主要考虑了以下各种干扰和误差因素[7],主要包括:
1)航向误差,即任意给定时间导弹实际航向角与理想航向角之间的差值;
2)导引头误差,包括由于导引头安装误差、伺服迟滞、加工缺陷或制造公差等原因而产生的系统误差,以及热噪声、目标回波起伏、多路径等原因引起随机误差。
在模型中应对上述误差进行模拟。对航向误差,可以在得到导弹理想航向后加上或减去预计的误差;对导引头误差,可以假定导引头测量的视线角速度存在误差且服从正态分布,并规定视线角速度标准偏差及抽样周期,在每个周期开始时,抽取代表视线角速度误差的随机数,并把它加到理论计算的视线角速度上去。
3 对抗仿真研究
当反舰导弹在地面坐标系内沿Ox轴方向飞行到240km的时候,以投影曲线的机动半径Rz =200m进行蛇形机动,此时,舰空导弹由位置(xI,zI)开始,以飞行速度VI=850m/s进行拦截,舰空导弹战斗部杀伤半径Re= 5m。反舰导弹开始进行蛇形机动时的初始相位角为ξ0=-PI/2,一个机动周期内,反舰导弹沿Ox轴方向飞行的距离为A =7000m。
上述仿真条件下,针对反舰导弹进行蛇行机动和不进行蛇行机动两种情况,根据舰空导弹不同的初始拦截条件下,分别进行了对比仿真,仿真数据见表1,相应仿真曲线见图2-图5所示。
表1 舰空导弹的脱靶量
图2 蛇行机动时对抗轨迹Fig. 2 Flight trajectory with snake maneuver
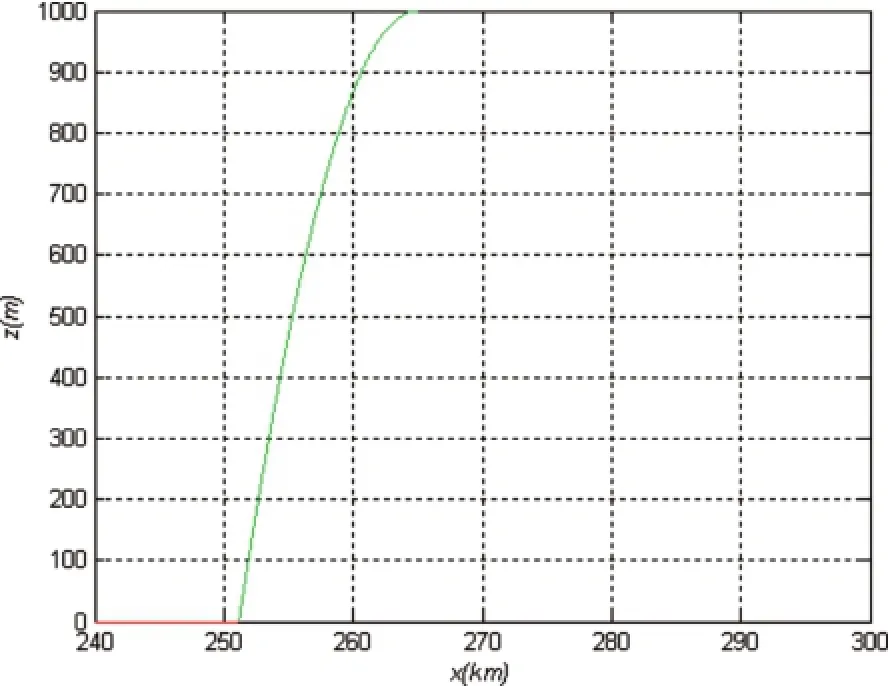
图3 直线飞行时对抗轨迹Fig. 3 Flight trajectory with no maneuver
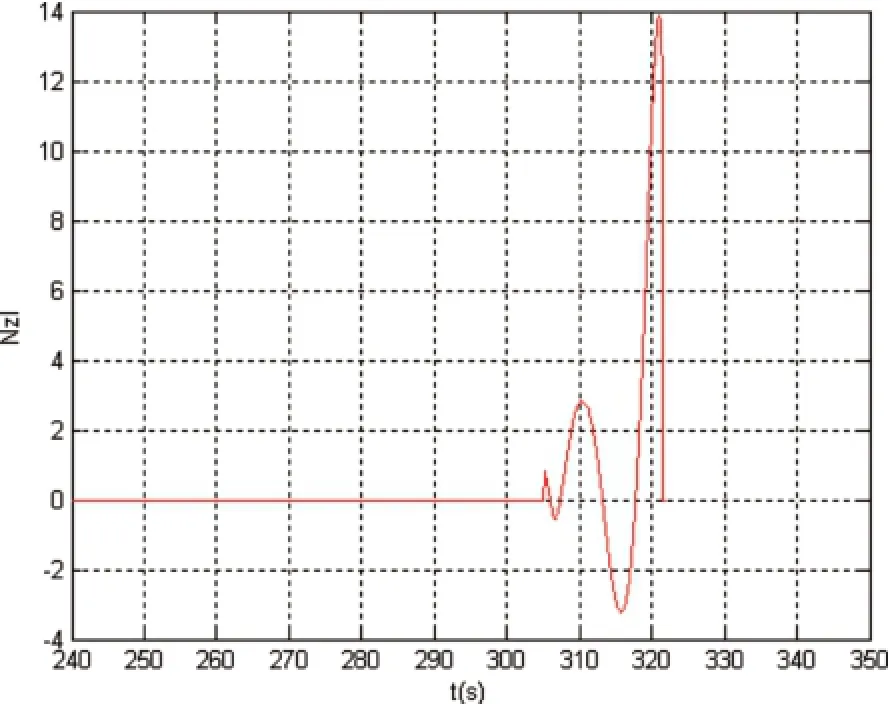
图4 舰空导弹过载(条件I)Fig. 4 Ship-to-air missile overload (condition I)
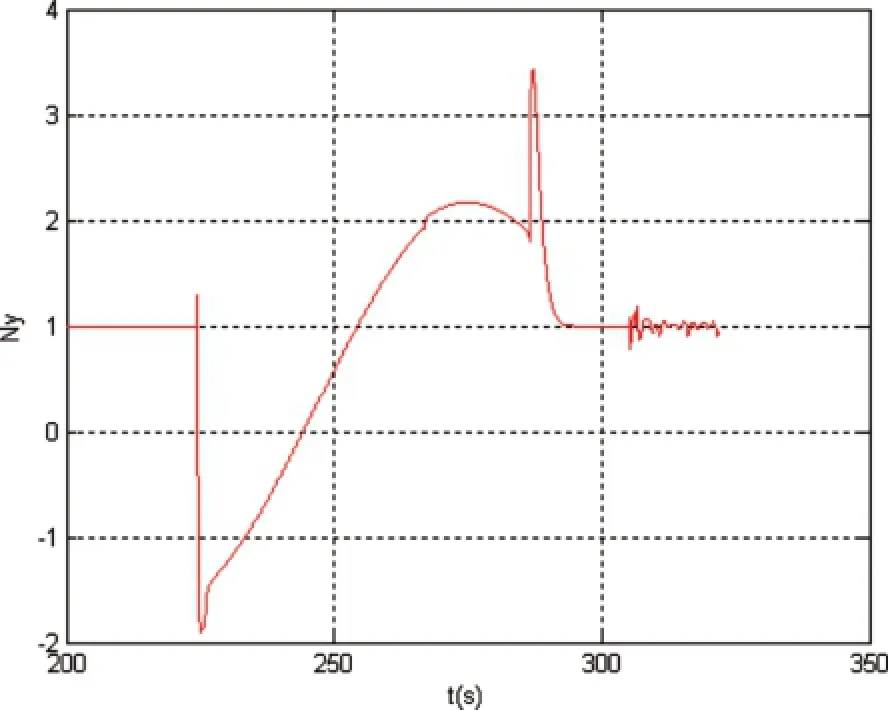
图5 反舰导弹过载(条件I)Fig. 5 Anti-ship missile overload (condition I)
由仿真数据可以看出,在相同的仿真条件下,舰空导弹脱靶量的大小,跟反舰导弹是否带末端蛇行机动有很大差别,带蛇行机动的脱靶量明显大于直线飞行的脱靶量,即带蛇行机动的反舰导弹,其突防效果更好。
4 结论
为了研究末端蛇行机动的突防效果,文章针对某型反舰导弹,通过建立航向平面内的反舰导弹末端蛇行机动弹道模型,以及反舰导弹与舰空导弹的对抗模型,在相同的拦截条件下,对比仿真了反舰导弹带末端蛇行机动和末端无机动两种情况下的对抗拦截。仿真结果表明,带蛇行机动的反舰导弹突防效果要优于末端直线飞行的反舰导弹。但是,由于本文研究的对抗仿真,并没有考虑末端蛇行机动的参数改变,如机动半径、机动周期的改变等,因此,不能对比总结那种机动参数下,反舰导弹的突防效果最好,这也是文章后续要深入研究的问题。
参考文献:
[1] 李勇, 马良. 超音速反舰导弹蛇行机动的突防方案设计[J]. 舰船电子工程, 2009, 29(10): 40-43.
Li Yong, Ma Liang. Research on the model od transsonic anti-ship missile's snake mobile penetration ability ship-to-air missile[J]. Ship Electronic Engineering, 2009, 29(10): 40-43.
[2] 曲东才, 林涛. 俄罗斯的白蛉(Moskit)反舰导弹[J]. 舰载武器, 1997, 5(3): 7-11.
Qu dongcai, Lin tao. Russian sandflies (Moskit) anti-ship missiles[J]. Shipborne Weapons, 1997, 5(3): 7-11.
[3] Gu Wenjin, Zhao Hongchao, Hu Yun'an. Research on the Stability of Overload-Control for Aerodynamic Missiles, Proceedings of the 5th WCICA [C]. Hangzhou: Zhejiang University, 2004, 6: 5450-5453.
[4] 赵红超, 顾文锦, 王瑞奇. 反舰导弹的自适应全局滑模变结构控制[J]. 控制工程, 2005, 12(4): 320-322.
Zhao Hongchao, Gu Wenjin. A adaptive global sliding mode variable structure control for anti-ship missile[J]. Control Engineering of China, 2005, 12(4): 320-322.
[5] 钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2000: 36-64, 175-203.
Qian Xiongfang, Lin ruixiong, Zhao yanan. Missile flight mechanics[M]. Beijing: Beijing Institute of Technology press, 2000: 36-64,175-203.
[6] Gregory Levitin,Kjell Hausken. False targets efficiency in defense strategy[J]. European Journal of Operational Researh, 2009, 194: 155-162.
[7] Michael M. Madden. Gravity Model Effects on Surface-Interacting Vehicles in Supersonic Flight[C]. AIAA Modeling and Simulation Technologies Conference, Toronto, Ontario Canada, 2010: 1-24.
[8] 范作娥. 基于蒙特卡洛法的反舰导弹末端机动突防效果研究[J]. 海军航空工程学院学报, 2010, 25(3): 241-246
FAN Zuo-e, Research on penetration effect of terninal maneuver for anti-ship missile based on monte carlo method[J]. Journal of Naval Aeronautical and Astronautical University, 2010, 25(3): 241-246.
Combat Simulation of the Anti-ship Missile with Snake Maneuver
FAN Zuo'e, PENG Wenhui, WU Gang
(Navy Submarine Academy, Department of Strategic Missile and Underwater Weapon, Qingdao 266044, China)
In order to study the effect of penetration of anti-ship missile with the terminal snake maneuver, the ballistic model of anti-ship missile is established. With the overload control theory, the overload control and mass center control signal of the anti-ship missile is designed; Based on the establishment of interception model between the ship-to-air missile and the anti-ship missile, interception and combat of ship-to-air missile and the anti-ship missile are simulated and compared under the with snake maneuver and without maneuver respectively. The simulation results verify that the penetration of anti-ship missile with snake maneuver is more effective than that of ordinary end without maneuver.
snake maneuver; anti-ship missile; combat simulation; penetration
10.3969/j.issn.2095-6649.2015.02.02
国家自然科学基金(61305136), 国家航空科学基金(20131384004), 潜艇学院青年基金资助项目。
范作娥(1980-), 女, 讲师, 博士, 主要研究方向: 飞行器导航、制导与先进控制。
范作娥,彭文辉,吴刚.蛇行机动反舰导弹对抗仿真研究[J].新型工业化,2015,5(2):7-12
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
福建质量管理(2020年5期)2020-03-11
中国工程机械学报(2019年4期)2019-08-06
铁道机车车辆(2019年3期)2019-07-29
振动工程学报(2019年2期)2019-05-13
兵器知识(2017年10期)2017-10-19
现代防御技术(2016年1期)2016-06-01
海军航空大学学报(2015年1期)2015-11-11
舰船电子工程(2015年8期)2015-03-14
现代防御技术(2014年5期)2014-02-28
