新型同轴对转摆线针轮传动的受力分析*
2015-01-10 05:16何小萍许立新
机械研究与应用 2015年6期
何小萍,许立新
(天津职业技术师范大学机械工程学院,天津 300222)
新型同轴对转摆线针轮传动的受力分析*
何小萍,许立新*
(天津职业技术师范大学机械工程学院,天津 300222)
在论述新型同轴对转摆线针轮行星传动原理的基础上,建立了内外输出针齿壳、摆线轮的受力模型,分析了摆线轮与针齿之间、摆线轮与柱销之间以及摆线轮与曲柄之间的受力情况。在此基础上,运用Matlab软件编程并求解,着重分析了转臂曲柄对摆线轮作用力的曲线随输入轴转动的变化规律。为进一步研究新型同轴对转摆线针轮行星传动参数、结构设计以及强度计算等提供了理论依据。
同轴对转;摆线针轮行星传动;受力分析
0 引 言
通常摆线针轮行星传动中转臂轴承的寿命是薄弱环节,进而影响整机的使用寿命,所以针对各种针摆行星传动的受力分析有很多。例如,文献[1]在论述RV传动原理和特点的基础上,计算了其传动效率和受力大小。文献[2]在考虑摆线轮修形引起的初始间隙的基础上,建立了各接触齿受力和接触变性的力分析模型,计算出针轮同时的受力齿数。文献[3]提出了三片摆线轮新型传动的受力分析方法,并与传统两片摆线轮传动结构的受力进行对比。文献[4]在论述双曲柄环板式针摆行星传动原理的基础上,建立了力分析模型,并与传统摆线针轮传动进行对比,这种传动转臂轴承的受力减小近一半。文献[5]分析了2K-V型行星传动机构的结构特点并对渐开线行星轮和摆线轮上曲柄轴承的作用力进行分析和对比,得出摆线轮上曲柄轴承能够承受更大的力。文献[6]分析了RV结构的优点并对RV传动机构的薄弱环节进行了受力分析,如转臂轴承、输出机构,了解了转臂轴承的受力情况。文献[7]在三齿轮联动双曲柄环板式针摆行星传动原理的基础上,提出了符合实际的变形协调条件,建立了受力分析模型,并编程绘制了转臂轴承受力的曲线图。
而同轴对转摆线针轮行星传动是一种新型传动,与普通摆线针轮传动相比同样具有传动比范围大,传动效率高,刚度大,多齿啮合承载能力高,结构紧凑,使用寿命长等优点。但因其有两个同轴同侧双输出传动,可以通过改变摆线针轮的匹配齿数获得不同的传动比和实现两根输出轴相对正反传动,所以是一种具有研究开发价值的新型传动。为了初步了解此新型传动受力的情况,将组成同轴对转摆线针轮传动减速器的主要构件作为研究对象,列出其受力平衡方程并求解,进而清楚各构件的受力状况,为进一步研究此新型传动参数优化、结构优化以及强度计算等提供了理论依据。
1 传动原理
新型同轴对转摆线针轮行星传动结构如图1所示,输入轴通过键与三个偏心套错位相连,构成三个偏心位相错120°的转臂曲柄。三个转臂曲柄通过深沟球轴承分别连接左置摆线轮、中间摆线轮和右置摆线轮。柱销贯穿于三片摆线轮上均匀布置的柱销孔中且柱销与转臂曲柄共同拨动三片摆线轮转动。三片摆线轮与对应针齿壳上的针齿销相啮合。针齿壳分为固定针齿壳、外输出针齿壳和内输出针齿壳。中置摆线轮与外输出针齿壳啮合,外输出针齿壳通过外支撑轴承连接固定针齿壳并采用螺钉连接外输出套筒轴,将运动输出。右置摆线轮与内输出针齿壳啮合,内输出针齿壳通过内支撑轴承连接外输出针齿壳并采用螺钉连接内输出轴,将运动输出。
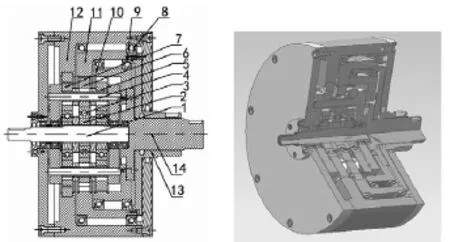
图1 新型同轴对转摆线针轮传动结构
2 受力分析
由于摆线轮与针齿啮合以及曲柄与摆线轮的受力情况和载荷分布很复杂,为了便于分析和研究,现作如下假设:①摆线轮与针齿是无间隙啮合的理想标准齿形;②将摆线轮、针齿和转臂视为刚体,变形忽略不计;③不考虑摩擦的影响;④该传动采用三个偏心相位相错120°的转臂曲柄均匀承担三片摆线轮的载荷,并运用转化机构法将行星轮系转化为定轴轮系,分析该减速器在内外输出轴承受负载扭矩为T的受力情况。
(1)内外输出针齿壳的受力分析 以内输出针齿壳为研究对象,由于内输出针齿壳与内输出轴固连,所以内输出针齿壳也受负载扭矩T,并同时还受右置摆线轮对它的作用力,这些力的作用线都经过针轮的节点,可以把这些力分解为沿针轮节圆半径的径向力和垂直于针轮节圆半径的切向力,因此可列出平衡方程为:

式中:F3t为内输出针齿壳对右置摆线轮的切向力;F3r为内输出针齿壳对右置摆线轮的径向力;rp3′为右置针轮节圆半径;rp3为右置针齿分布圆半径;K1为短幅系数。
由于外输出针齿壳与内输出针齿壳受力情况相同,所以可列出平衡方程为:

式中:F2t为外输出针齿壳对中置摆线轮的切向力,F2r为外输出针齿壳对中置摆线轮的径向力,rp2′为中置针轮节圆半径,rp2为中置针齿分布圆半径,Kv为计算系数,其中
(2)摆线轮的受力分析 以右置摆线轮为研究对象,以输入轴截面的水平方向和垂直方向建立直角坐标系,如图2是右置摆线轮在三个偏心相位相差120°时的受力分析图,右置摆线轮顺时针转动分别受到内输出针齿壳、柱销、转臂曲柄的作用力且受力平衡,针轮对右置摆线轮作用力的作用线都通过节点,可以分解为沿右置摆线轮节圆半径向外的径向力和垂直于节圆半径的切向力,柱销对右置摆线轮作用力的作用线通过柱销孔的中心并与转臂曲柄平行,转臂曲柄对右置摆线轮作用力的作用线通过摆线轮的中心,由此可列出右置摆线轮在x、y方向的受力平衡方程和对右置摆线轮旋转中心取矩的平衡方程:

式中:Fr3为转臂曲柄对右置摆线轮的作用力;Fr3x、Fr3y为转臂曲柄对右置摆线轮在x、y方向的作用力; Q3为柱销对右置摆线轮的作用力;θ为输入轴转动的角度;rc3′为右置摆线轮节圆半径;zc3为右置摆线轮齿数;zp3为内输出壳嵌入的针齿数。
以中置摆线轮为研究对象,如图3是中置摆线轮在三个偏心相位相差120°时的受力分析图,中置摆线轮和右置摆线轮的受力原理相同,所以同样可列出中置摆线轮在x、y方向的受力平衡方程和对中置摆线轮旋转中心取矩的平衡方程:


式中:Fr2为转臂曲柄对中置摆线轮的作用力;Fr2x、Fr2y为转臂曲柄对中置摆线轮在x、y方向的作用力; Q2为柱销对中置摆线轮的作用力;rc2′为中置摆线轮节圆半径;zc2为中置摆线轮齿数;zp2为外输出壳嵌入的针齿数。

图2 右置摆线轮受力分析图

图3 中置摆线轮受力分析图
由于柱销分别受到左置摆线轮、中置摆线轮和右置摆线轮作用力且受力平衡,所以可列
出柱销的受力平衡方程:

以左置摆线轮为研究对象,如图4是左置摆线轮在三个偏心相位相差120°时的受力分析图。
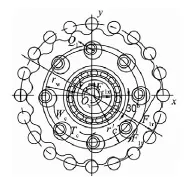
图4 左置摆线轮受力分析图
左置摆线轮和右置摆线轮的受力原理也相同,所以同样可列出对左置摆线轮旋转中心取矩的平衡方程和左置摆线轮在x、y方向的受力平衡方程:
式中:Fr1为转臂曲柄对左置摆线轮的作用力,Fr1x、Fr1y为转臂曲柄对左置摆线轮在x、y方向的作用力,Q1为柱销对左置摆线轮的作用力,rc1′为左置摆线轮节圆半径,zc1为左置摆线轮齿数,zp1为固定针齿壳嵌入的针齿数。
3 算例分析
以摆线轮设计参数下的模型为例,模型主要参数如表1所列。输入轴转速为1 410 r/min,负载扭矩为100 N·m。

表1 摆线轮参数
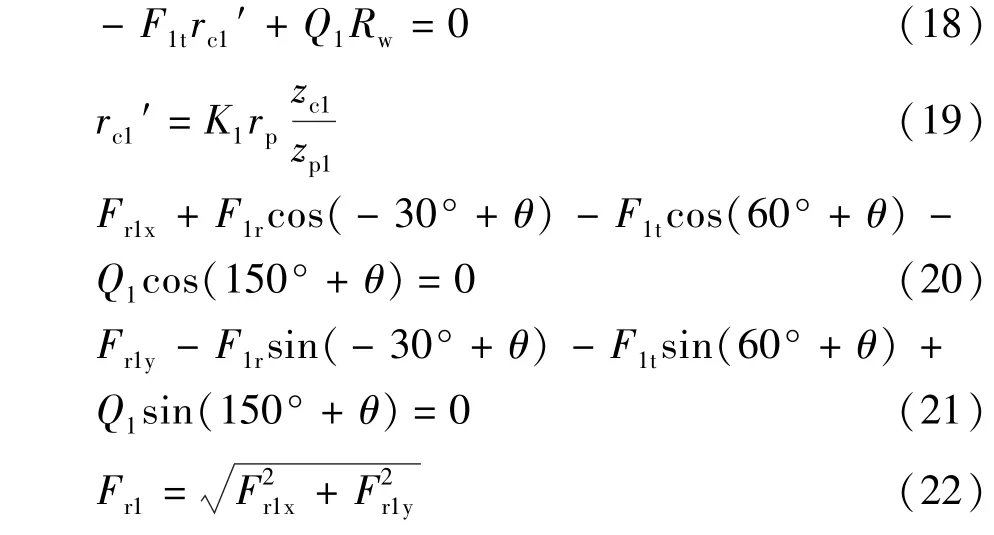
根据表1参数和上述方程运用Matlab软件编程可求出Fr3、Fr2、Fr1的受力曲线图,如图5~7。
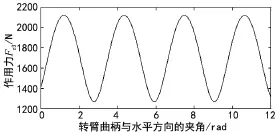
图5 转臂曲柄对右置摆线轮的作用力
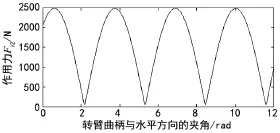
图6 转臂曲柄对中置摆线轮的作用力
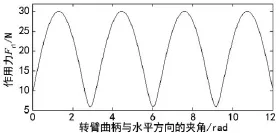
图7 转臂曲柄对左置摆线轮的作用力
4 结 论
建立了摆线轮的受力分析模型并运用Matlab软件编程求解方程,得出转臂曲柄的受力曲线图。从摆线轮的受力分析中可知,转臂曲柄对摆线轮作用力曲线随着输入轴转角的变化都呈周期性变化,且从这些曲线图中可以看出转臂曲柄对中置摆线轮的作用力最大,对左置摆线轮的作用力最小。且这些分析为摆线针轮传动的优化设计和进一步研究同轴对转摆线针轮行星传动的参数、结构设计以及强度计算等提供了理论依据。
[1]何卫东,李力行.RV传动的效率及其受力[J].大连铁道学院学报,1992,13(1):75-81.
[2]何卫东,李力行,李 军.机器人用RV传动中摆线轮受力分析[J].大连铁道学院学报,1999,20(2):50-53.
[3]关于民,万朝燕.三片摆线轮新型针轮传动及其受力分析[J].大连铁道学院学报,1999,20(3):49-51.
[4]何卫东,宋金刚,刘 朴,等.高承载双曲柄环板式针摆行星传动受力分析[J].大连铁道学院学报,2001,22(2):19-22.
[5]李充宁,孙 涛,刘继岩.2K-V型行星传动的结构和力分析[J].机械传动,2000,24(2):7-9.
[6]董向阳,邓建一,陈建平.RV传动机构的受力[J].上海交通大学学报,1996,30(5):66-70.
[7]何卫东,李 欣,李力行.三齿轮联动双曲柄环板式针摆行星传动受力分析[J].大连铁道学院学报,2005,26(1):21-25.
[8]郑州工学院.摆线针轮行星传动[M].北京:科学出版社,1979.
Force Analysis of a New Coaxial Counter Rotating Cycloid Pin Gear Transm ission
HE Xiao-ping,XU Li-xin
(School ofMechanical Engineering,Tianjin University of Technology and Education,Tianjin 300222,China)
On the basis of discussing the principle of new coaxial counter rotating cycloid pin gear planetary transmission,the stressmodel of the internal and external output pin tooth shell and the cycloid gear is established and force conditions of the cycloid gear and the pin gear,the cycloid gear and the column,the cycloid gear and the crank are analyzed in this paper.On this basis,the Matlab software is used to program and solve,and the force curve of the jib crank to the cycloid gear is analyzed emphatically.So a theoretical basis is provided to further study the new coaxial counter rotating cycloid pin gear planetary transmission parameters,structural design and strength calculation.
coaxial counter rotating;cycloid pin gear planetary transmission;force analysis
TH132
A
1007-4414(2015)06-0049-03
10.16576/j.cnki.1007-4414.2015.06.018
2015-09-13
国家自然科学基金(编号:51305300);中国博士后科学基金特别资助(编号:2015T80220);校级优秀青年教师资助项目(编号: RC14-45)及天津职业技术师范大学研究生创新基金(编号:YC201403)资助。
何小萍(1986-),女,湖南永州人,硕士研究生,研究方向:机械系统动力学。
许立新(1982-),男,天津人,博士,副教授,研究方向:精密摆线传动、机械动力学和多体动力学。
猜你喜欢
汽车实用技术(2021年23期)2022-01-05
防爆电机(2021年1期)2021-03-29
轮胎工业(2020年2期)2020-03-01
制造技术与机床(2017年3期)2017-06-23
中学生数理化·高三版(2016年2期)2016-09-10
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
中国卫生(2014年5期)2014-11-10
机械与电子(2014年2期)2014-02-28