
高速公路智能型多功能清洁车研发
2015-01-12 05:59罗二娟
山西交通科技 2015年5期
罗二娟
(山西省交通科学研究院,山西 太原 030006)
0 引言
随着我国高速公路大量建成通车,路面、隧道、桥梁及其附属设施的日常保洁任务越来越艰巨。为确保车辆运行环境良好,保证行车安全,许多技术先进且自动化程度较高的道路清扫车、绿篱车、护栏清洗车、高速公路隧道清洗车等陆续投入工程应用,其结果在很大程度上提高了道路保洁效果和效率。但纵观目前我国高速公路养护的整体作业水平还较低,不少地区(尤其是交通流较少的偏远地段)主要还依靠人工清洁完成作业。即使是正在使用的清洗设备,也存在较为严重的单一作业、配套不全和作业效率有待提高的问题。有鉴于此,基于高速公路及隧道清洁工程的急需,研发一代智能型多功能综合清洁车是十分必要的,这对于迅速提高我国高速公路的保洁能力,进而提高我国高速公路的整体养护和管理水平具有重要意义。
本文提出一款新型的高速公路智能型多功能综合清洁车的设计构思,它集草坪修剪、高枝修剪、隧道清洗、标识牌清洗、边坡清洗等功能于一体,实现一车多用。由于自动化程度高,能够达到智能型多功能节能环保的效果。整车具有较强的针对性、实用性和推广价值。
1 国内外现状及分析
从高速公路出现直至目前,研究各种高性能清洁设备,以保障道路整洁与安全一直是世界各国,特别是工业发达国家特别关注的焦点。这些技术装备主要有绿篱机、隧道清洗车、高枝修剪车等等,德国等先进国家近年推出的多功能臂架悬挂式修剪机可修剪高达7 m的绿篱,还可以修剪道路、河流等堤岸两侧的杂草和灌木丛[1-2]。
现有的隧道清洗车分高压水清洗车和滚刷式清洗车。高压水清洗车无法在短时间内清洁污渍,作业效率低,还需要大量的水源,单次作业里程短,同时隧道内会积水,影响行车安全[3]。滚刷式隧道清洗车可以避免水源浪费以及高压水对隧道墙面的冲击破坏,节能环保。
20世纪70年代前,防撞护栏、隔离栏及路标识牌一直依靠人力清洗,劳动强度大、劳动效率低、且干扰交通。此后国外开始尝试机械作业车,主要有德国慕迪卡和美国福特。80年代初,美国福特公司研制了防撞护栏清洗设备,它是在轮式行走底盘的前桥上悬挂作业装置,采用机械传动,以单刷射水方式作业[4]。目前国内也引进了德国的设备,但造价高、维修困难。我国也开始研制或使用护栏清洗车,主要有山西交科、辽宁鞍山森远、北京泽通等。
2 新型智能多功能清洁车
综上所述,国内外有众多功能各异的专用修剪、清洗、养护类机械设备,道路养护、清洁已基本实现机械化,但对集绿篱、高枝修剪,隧道清洗,护栏、标识牌、隔声屏障清洗等于一体的功能齐全、结构简单、操作方便且自动化程度高的综合养护清洁设备研究和开发很少。
鉴于高速公路发展趋势和国内外高速公路清洁设备的需求,本文提出研发一款智能型多功能篱栏隧道综合清洁车,其设计思想和基本功能不仅能够通过快速换装工作装置的方式实现绿篱、高枝修剪,护栏、标识牌、屏障清洗,隧道清洗等功能,而且具有实时监控系统,操作更加简单化和人性化,其工作装置采用前悬挂方式,即将通用操作臂固定于承载车前车架上。通过更换通用操作臂操作手的结构实现不同功能。显然,综合性能和多功能作业是其主要技术特征。
3 新型智能多功能清洁车通用操作臂设计
3.1 通用操作臂结构
通用操作臂部分是串联机械手结构,是一个开式运动链,由移动关节—转动关节—转动关节—转动关节—转动关节—转动关节组成,具有6个自由度。操作臂的一端固定在基座(清洁车)上,另一端是自由的,安装着操作手(刀头),用以操作刀头完成各种修剪和清洗作业。关节由液压缸驱动,关节的相对运动导致连杆的运动,使刀头到达相应的位姿。同时通过传感器智能实时监控,使操作更加简单化、人性化。
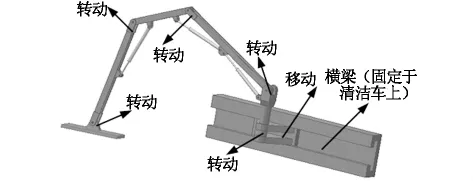
图1 操作臂结构
3.2 通用操作臂运动学分析
为了便于控制,需研究操作臂中各连杆之间的位移关系。具体方法是在每个连杆上固连一个坐标系,然后描述这些坐标系之间的关系。运动学分析有多种方法,本文采用D-H法,推导操作手相对于基座的齐次变换矩阵,研究操作臂的运动方程。首先建立操作臂连杆坐标系如图2所示。
根据各连杆坐标系,给出操作臂连杆参数如表1所示。
通过连杆参数,计算出各个连杆间的坐标变换矩阵见公式(1)~公式(6)。
根据公式(1)~公式(6)计算出通用操作臂变换矩阵见公式(7)。

图2 操作臂连杆坐标系
因操作手(刀头)与连杆6固连,故通过公式(7)即可计算出刀头相当于基座之间的坐标关系,从而得出操作臂的运动学方程,通过各关节传感器的输出,可以得出各个关节变量的值,给定基座坐标,乘以公式(7),从而求出操作手(刀头)的坐标,用以控制操作手(刀头)到达相应的位置进行修剪和清洁工作。
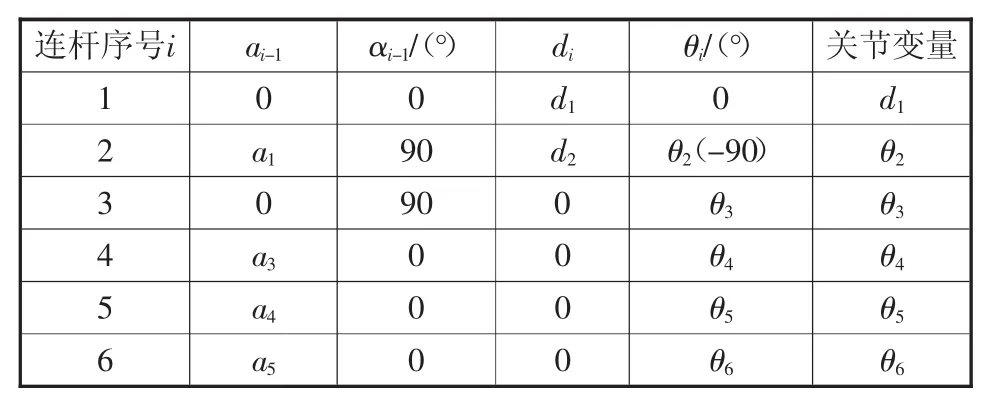
表1 操作臂连杆参数


4 智能新型清洁车功能及刀头介绍
智能新型多功能清洁车主要有以下几方面的功能,见图3。

图3 新型清洁车主要功能
a)高速公路草坪修剪(公路路基边坡草坪修剪、公路路肩以及中央分隔带草皮或绿化带波形护栏及立柱处草坪、灌木修剪),草坪修剪刀头与通用操作臂间通过转动副相连,刀头可以旋转,以对有坡度的草坪进行修剪,并且通过旋转可以绕过护栏进行修剪作业。
b)高枝修剪,可以修剪高达7 m的树枝,刀头设计成锯齿状,和树枝结构相似,有利于修剪;同时刀头长度较长,可以同时修剪多根树枝,修剪范围大,修剪效率高。
c)边坡清洗,清洗高速公路路边边坡及路沿,刀头为毛刷形式,刀头可以绕通用操作臂旋转,运动灵活。
d)隧道清洗,采用滚刷式隧道清洗模式,滚刷可以绕通用操作臂旋转,用以实现清洗隧道壁、隧道顶和隧道地面的清洗。
e)标识牌、隔声屏障、护栏清洗等,刀头采用滚筒模式,滚筒可以绕自身轴线高速旋转,以达到清洗的目的。同时,通过控制通用操作臂,可以调节清洁滚筒的高低,用以实现对护栏、标识牌和隔声屏障等的清洗。
5 结论
本文通过分析国内外现有高速公路清洁设备研究状况以及市场需求,提出了一款新型智能多功能清洁车的设计构思,该清洁车具有多功能、智能化、实时监控等优点。同时对该清洁车的通用操作臂进行了结构分析和运动学计算,为整机的操控系统和作业装置的结构设计提供了必要的技术依据。
猜你喜欢
落叶果树(2021年6期)2021-02-12
探索科学(学术版)(2020年10期)2021-01-13
湖北农机化(2020年4期)2020-07-24
临床医学工程(2020年8期)2020-07-20
东坡赤壁诗词(2019年1期)2019-04-30
电子制作(2017年9期)2017-04-17
防护林科技(2017年4期)2017-04-04
现代园艺(2017年14期)2017-02-05
移动通信(2015年18期)2015-08-24
党的生活(2015年6期)2015-03-07
