
一种低成本径-轴向集成化主动磁轴承
2015-01-13 10:12黄松柏
微特电机 2015年10期
黄松柏
(湖北理工学院,黄石435003)
0 引 言
由于应用的需要,特别是转子的临界转速的条件,主轴的轴向长度受到了限制。因此,开发一种集成化的径-轴向磁轴承[1-3]的目的就是将转子的有效长度减小。图1 显示了有两个径向和一个轴向磁轴承的传统设计与有一个径-轴向和一个径向磁轴承的新型设计的比较。通过集成径向和轴向磁轴承可以节省很多的空间。对于相同的承载力,传统设计需要新型设计的两倍的空间。为了降低成本,采用转子非迭片结构的同极型磁轴承。此外,可以将辅助轴承集成到系统里面去。
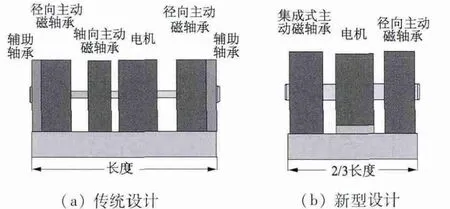
图1 传统设计与新型设计的比较
1 机械设计
设计的新型磁轴承机械结构图如图2 所示。径向磁轴承和轴向磁轴承集成为一个整体;T 型轴向圆盘的侧面作为磁轴承的转子铁心;径向异极型磁轴承有四个磁极。可以放置线圈的叠压式槽,由标准的E 型锡片构成;轴向线圈绕制成环型;主轴是非迭片式结构。
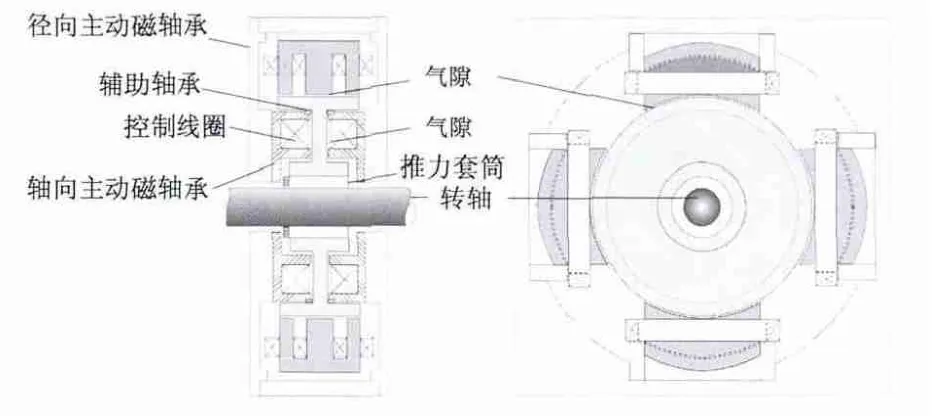
图2 径向-轴向磁轴承的机械结构图
通过使用铜环将径向和轴向辅助轴承固定到T型圆盘上,用推力套筒将轴承安放到主轴上。该磁轴承的主要结构参数,如表1 所示。

表1 径向轴向磁轴承的特征参数

续 表
2 磁轴承特性
采用这种安装结构,可以减小磁轴承所需的空间,因此,本文提出的新型磁轴承可以作为一种结构紧凑的磁轴承。在高转速下,减小转子的长度有利于转子的动态特性。在相同的负载条件下,由于是T 型轴向圆盘,增加磁极面积可能会使得线圈电流减小和安匝数减少。
和异极型磁轴承相比,同极型磁轴承的功耗相对小很多,而且磁滞损耗也很小[4]。因此,这种磁轴承最适合用于高转速的场合。不采用转子迭片式结构,能够很大程度上降低产品的成本。同时,由于采用刚性主轴结构,可以使其应用于高转速场合。径向的转动惯量会因圆盘状而增加,因此这种设计尤其适合应用于飞轮储能系统[5]。
3 实验装置MBZ120
这种结构紧凑的径-轴向磁轴承被集成在实验装置MBZ120 里。图3 显示了实验装置的零件拆分图,另一径向磁轴承也设计成同极型的,有4 个磁极,同时还配有辅助轴承。转子重达2.7 kg,长约250 mm。由于是在变换的位移条件下进行测试,轴的直径是20 mm。径向磁轴承的气隙长度和径-轴向磁轴承的径向气隙长度一样。径向承载力达到28 N。
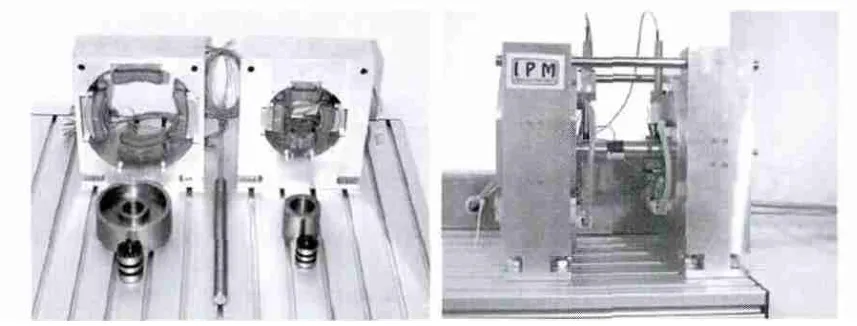
图3 实验装置MBZ120
信号处理单元的主要结构以及控制回路如图4所示。对于每个磁轴承,每个自由度均存在控制回路(分散控制)。转子的径向位移采用电涡流传感器测量。采集到的位移信号经过滤波和A/D 转换电路进行处理后,再传送给主控芯片进行数字处理。实验中控制器采用DSP 控制器芯片。该控制器输出信号分成两路相位相反的信号。利用电压信号来表示对应的偏磁电流信号。对于有无变化的偏磁电流,控制器都可以实现这种磁轴承的数字控制。脉冲的时间调制(PDM)之后,就可以控制驱动线圈的功率放大器。该功率放大器的输入电压是30 V。最大线圈电流为3 A。

图4 实验装置MBZ120 的控制回路
4 仿真系统
为了适应复杂的算法,如模糊控制,适应性控制和非线性补偿控制,对快速动态过程系统做到实时控制,研究开发了一种高速的矩阵控制器。在仿真系统的帮助下,计算出设计的过程和最优控制算法。这种控制算法变换成一种矩阵形式如图5 所示。所保存的文件可以下载到硬件里,这种硬件由A/D 和D/A 转换器、地址发生器、存储器所构成。控制过程的一个周期是200 ns,控制算法的类型和大小都是独立的。由于在控制过程中无需计算,因此,这种控制器的可靠性得到较大程度上的加强。与传统的DSP 系统相比,由于没有处理器的存在,控制器的成本可以大大降低。
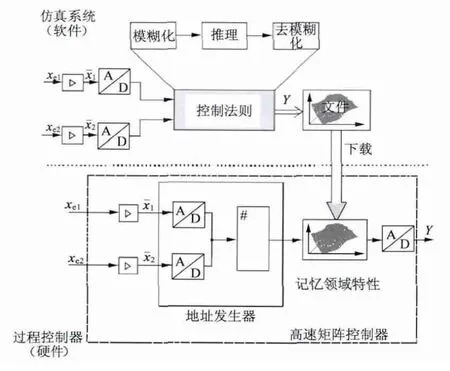
图5 高速矩阵控制器
5 实验结果
5.1 起浮实验
在起浮试验时,主轴被从任意位置提升到所设定的位置。系统可以在最小超调量和较短起伏时间内稳定。图6 显示了在起浮阶段径-轴向磁轴承的转子关于X 轴和Y 轴的位置。在X 方向的超调达到了75 μm,而在Y 方向由于重力的作用其超调达到了125 μm。X 方向稳定时间为1.0 s,Y 方向的稳定时间为1.5 s。
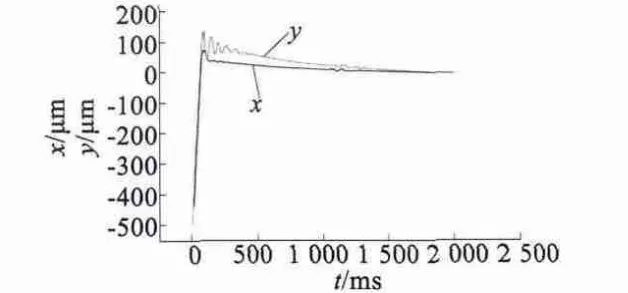
图6 径向磁轴承起浮时转子位置曲线
5.2 全速运行实验
为了测试径-轴向磁轴承在不同转速下的参数,实验装置MBZ120 配有一个外部的磁悬浮驱动。
图7 显示了径向-轴向磁轴承的转子在X 轴方向幅值。由于受到耦合的限制,可实现最大的转速为12 000 r/min。在临界转速8 400 r/min 的情况下,最大位移幅值为66 μm。涡流损耗对长时间运行的转子表面的温度不起作用。
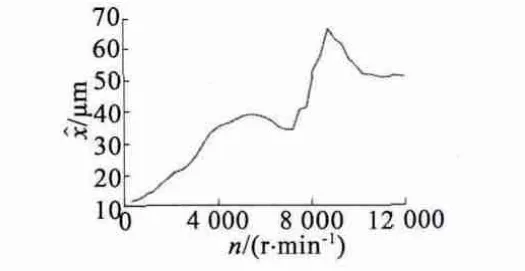
图7 转子位置幅值与转速的关系曲线
5.3 负载测试
通过实验,测试作用在转子上沿Y 轴负方向的外部静态负载和变化负载情况。图8 显示了径向-轴向磁轴承在平衡位置时实验得到的Y 轴方向的承载力和计算得到的Y 轴方向的承载力与电流的关系曲线。所测量的承载力超高设计的承载力,在最大电流情况下,其偏差达到了10 N。径向力。转子位置范围就是辅助轴承的气隙范围。对于功率放大器,线圈电流被限定在3 A。在最大气隙情况下,承载力达到了25 N。由图9 可知,该径向磁轴承在由电流、位移和悬浮力组成的弯曲面数据以内运行,转子可以实现稳定悬浮,且计算的力与所测量的数据相吻合。
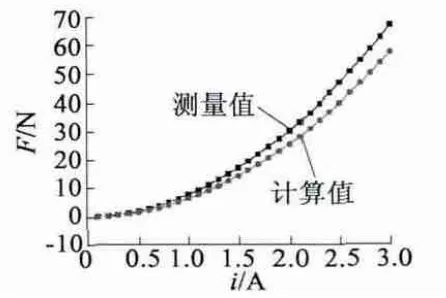
图8 径向-轴向磁轴承电流与力的关系曲线
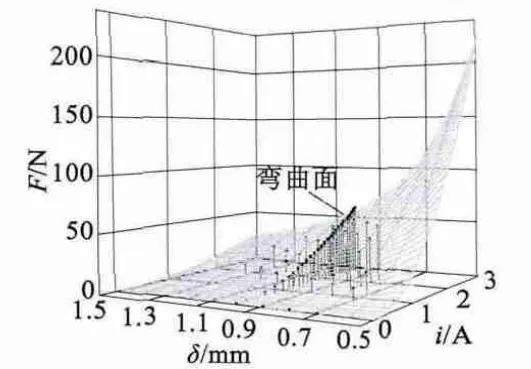
图9 径向磁轴承力的特征域
6 结 语
由试验可知,在装有磁悬浮转子的实验装置里,本文提出的径-轴向磁轴承和传统磁轴承相比具有很大优势,以下是关于设计和实验过程的结论:
(1)由于低成本的限制,磁轴承的新型设计方案中,转子是非迭片式结构的。径向磁轴承仅有4个磁极,且不需要对位置传感器进行测量跟踪。此外由于紧凑的设计,这种磁轴承所需的空间明显减小了。
(2)使用异极型磁轴承能够降低磁滞损耗,通过增加圆盘的面积,在相同承载的条件下,线圈的电流可以大大减小。因此,也可以降低偏差功耗。
(3)这种磁轴承具有结构紧凑的优点,因此尤其适合于高速的场合应用,同时由于是圆盘状,适合用于飞轮储能的悬浮支承的场合。
[1] 赵旭升,邓智泉,王晓琳,等.永磁偏置磁轴承的研究现状及其发展[J].电工技术学报,2009,24(9):9-20.
[2] FANG J C,WANG X,WEI T,et al.Homopolar 2-pole radial permanent-magnet biased magnetic bearing with low rotating loss[J]. IEEE Transactions on Magnetics,2012,48(8):2293-2303.
[3] 朱熀秋,邓智泉,袁寿其,等.永磁偏置径向-轴向磁悬浮轴承工作原理和参数设计[J].中国电机工程学报,2002,22(9):54-58.
[4] FANG J C,ZHENG S Q,HAN B C. AMB vibration control for structural resonance of double-gimbal control moment gyro with high-speed magnetically suspended rotor[J]. IEEE/ASME Transactions on Mechatronics,2013,18(1):32-43.
[5] REN Y,FANG J C. High-stability and fast-response twisting motion control for the magnetically suspended rotor system in a control moment gyro[J].IEEE/ASME Transactions on Mechatronics,2013,18(5):1625-1634.
猜你喜欢
大电机技术(2022年4期)2022-08-30
水泵技术(2021年5期)2021-12-31
中学生数理化·高一版(2021年3期)2021-06-09
数学物理学报(2021年1期)2021-03-29
重型机械(2020年3期)2020-08-24
装备制造技术(2020年12期)2020-05-22
数学年刊A辑(中文版)(2019年3期)2019-10-08
模具制造(2019年7期)2019-09-25
制造技术与机床(2018年12期)2018-12-23
北京航空航天大学学报(2017年4期)2017-11-23
