
永磁同步电动机控制系统PI 参数自动设置方法
2015-01-13 10:13薛晓明
微特电机 2015年10期
薛晓明,陈 震
(1.常州信息技术学院,常州213164;2.泰州职业技术学院,泰州225300)
0 引 言
近年来随着电力电子技术、变频控制与微处理器的快速发展,永磁同步电动机因体积小、效率高、响应快、脉动转矩低等优点已逐渐在数控机床、工业机器人等领域成为首选的驱动电机[1-4]。永磁同步电动机控制系统采用电流内环、速度外环的级联PI控制结构。为了获得优越的控制性能,很多文献运用现代控制理论如模糊自适应[5-6]、神经网络[7-8]等智能算法来自动设置两个环的PI 参数。报道的方法普遍存在控制系统复杂程度高,控制性能取决于辨识算法和收敛时间。因此,目前实际产品中都采用传统的方法来设置PI 参数。传统的方法首先利用特定的仪器测量永磁同步电动机的参数[9-11],然后由具有专业经验的工程技术人员根据系统要求的性能指标反复调试获得PI 参数,但获得的PI 参数只能对应一台电机。由于每台电机参数不尽相同,因此对应不同电机,PI 参数调试的工作量非常大[12]。
为此,本文提出一种自动设置的永磁同步电动机PI 参数的方法,控制系统首先产生一组测试信号自动测量永磁同步电动机的电气及机械参数,然后利用这些参数及系统需求的性能,自动计算电流及速度环的PI 参数,用一个指令自动完成所有控制系统PI 参数的设置。
1 永磁同步电动机数学模型
将永磁同步电动机在a-b-c 三相静止坐标系下的电压方程进行Clark 变换,Park 变换、得到d-q坐标系下PMSM 的定子电压方程:


转矩方程:

当采用id=0 的矢量控制方法时,式(3)可改写:

机械方程:

式(1)~式(5)中:ud,uq和id,iq分别为d 轴和q 轴电压与电流;R 为定子电阻;Ld,Lq分别为d 轴和q轴电感;φm为转子永磁体产生的磁通链;ωr为电机电气角速度;ωm为电机机械角速度;p 为电机极对数;J 为电机负载的转动惯量;B 为摩擦系数;Te为电磁转矩;TL为负载转矩。
2 控制系统PI 参数分析
2.1 电流环
控制系统电流环的方框图如图1 所示,其中Kp-iq,Ki-iq分别为电流PI 控制器的比例和积分增益。
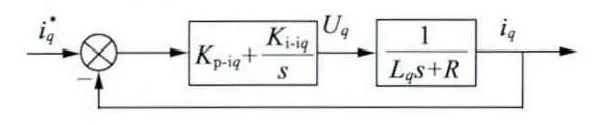
图1 控制系统电流环方框图

观察式(6),电流环为一阶惯性系统,ωiq为截止频率,通常选择为PWM调制频率的1/10,即500 ~1 500 Hz[13]。由此,Kp-iq与Ki-iq可计算如下:

由于控制系统中电流环的q 轴和d 轴相互平行,d 轴环路参数选择方法与q 轴类似。
因此,只要知道电机的交直轴电感和电阻即可计算出电流环的增益值。
2.2 速度环
控制系统速度环的方框图如图2 所示。通常电流环的截止频率比速度环的截止频率高出10 倍以上,此时电流环的传递函数近似为1[13]。若不考虑干扰,则速度环闭环传递函数:
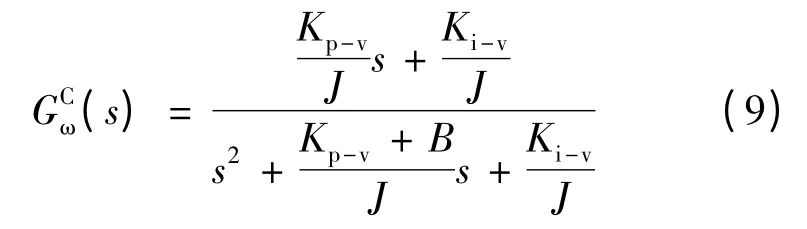
式中:Kp-v与Ki-v分别为速度环的积分和比例增益。

图2 控制系统速度环方框图
设速度环的频宽为ωv,阻尼比为1,则式(9)的特征参数:
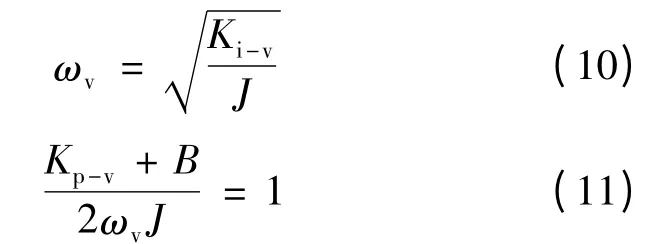
根据式(10)、式(11)可计算速度环控制增益:

因此,利用预设的频宽ωv及J,B 等参数,即可计算出速度环的增益值。
3 电气参数辨识
3.1 定子电阻的辨识
当电机d 轴与定子A 相绕组轴线的夹角静止在θr=-90°位置,在d 轴加入一直流电流,q 轴电流为零,因转子不动,由式(1)可得直轴电压:

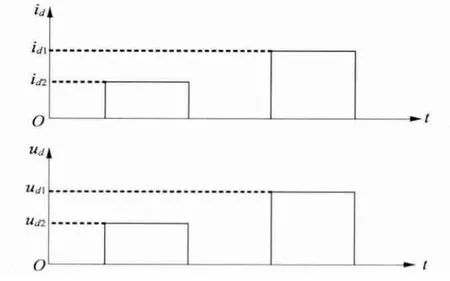
图3 施加不同的d 轴电流示意图
3.2 交直轴电感的辨识
如果分别向q 轴和d 轴加入脉冲电压,两个电压脉冲的时间分别为th1,th2,设th1=th2=h,如图4所示。因时间很短,定子电阻的影响可忽略,且转子的转动量很小,也可忽略不计,根据式(1)和式(2)可得:
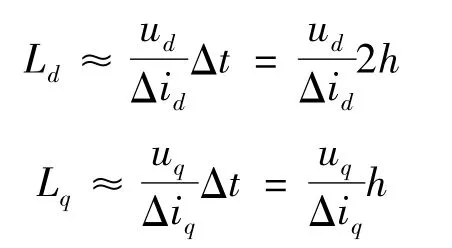
因此,通过测量电流的变化量可以计算出交直轴电感。电压用脉宽调制产生,其值易受到延迟时间的影响,测量时重复两次,加入同方向但不同大小的电压,再将结果相减,以消除延迟时间的影响,修正后的交直轴电感:
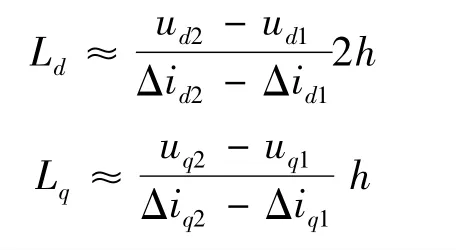
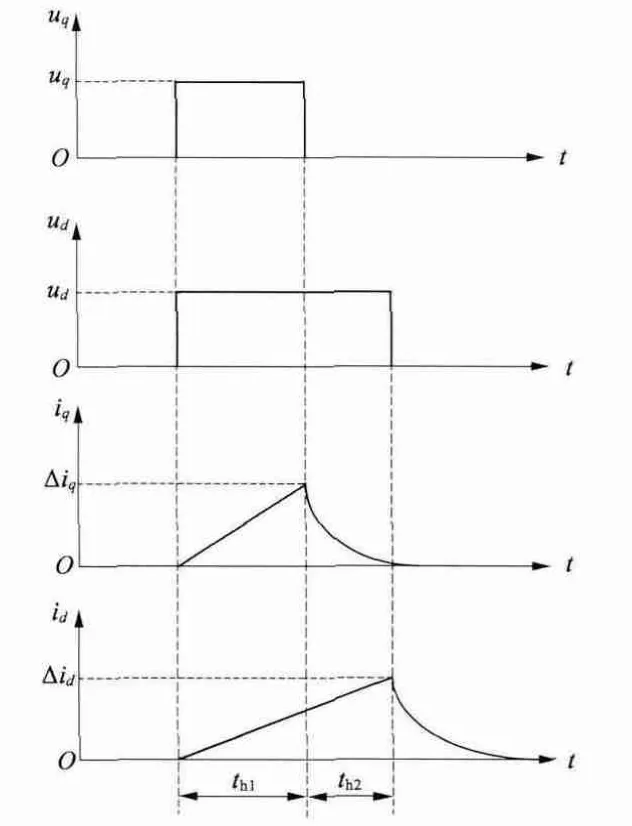
图4 加入脉冲电压示意图
4 机械参数辨识
4.1 转矩常数辨识
令id=0,适当加入iq使电机转动,对式(2)进行拉普拉斯变化,可得:

变换式(12)可得反电动势常数Ke估测值:

因此利用q 轴电压命令、转速、电流及电气参数即可估测Ke。图5 为反电动势常数估测方框图。由永磁同步电动机的数学模型可知,转矩常数为反电动势常数的1.5 倍。
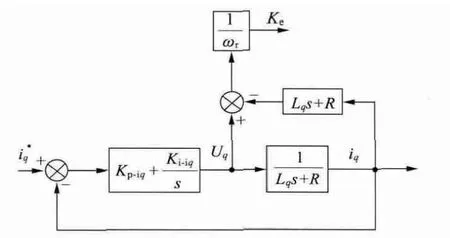
图5 反电动势常数估测方框图
4.2 机械参数辨识
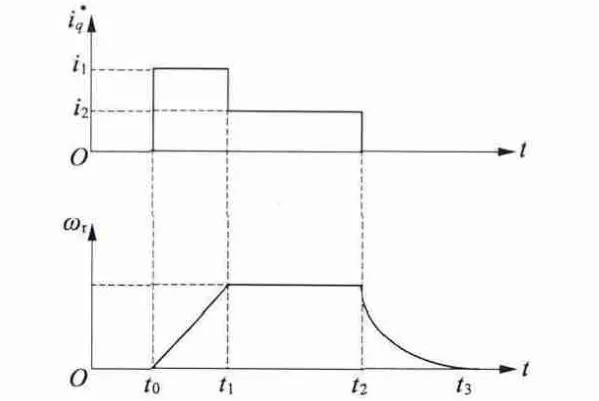
图6 机械参数测量示意图
如图6 所示,首先于时间t0设定q 轴电流命令=i1,使电机开始加速,并于时间t1转速达到目标值ωr。因此时尚不知机械参数,故将速度控制比例增益Kp-v设定为0,积分增益Ki-v设定为1,同时起动速度闭环控制。由于控制增益不大,转速到达稳态的时间会较长。假设转速于t2达到稳态,此时电流必须克服摩擦力,由式(5)可得摩擦系数:
然后设定电流命令为零,使电机开始减速并在t3降到零。假设在t2至t3区间电机速度线性下降,由式(5)可知惯量:
5 实验结果
为了验证所提出方法的正确性,以2 台400 W、8 极的永磁同步电动机作为实验样机,控制系统的调制频率为15 kHz,用直流电动机作为负载。图7显示参数自动识别的实验结果,开始后大约1 s 的时间测量电阻及电感,观察q 轴电流波形,有两个定电流的脉冲测量电阻,以及一个较小的脉冲测量电感,在此之后即设定电流增益并起动电流控制。t =1 s 之后到大约7.5 s 为测量电机机械参数的过程,实测波形与图6 的示意图波形类似,测量结束后即设定控制系统的增益,在电机转速降到零速之后控制系统起动电机进入工作状态。
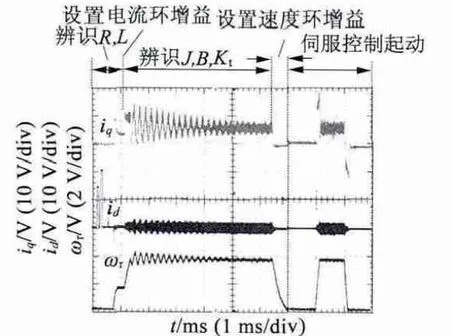
图7 参数自动设置的波形
表1、表2 为两台样机采用提出方法与传统方法结果比较。从表1、表2 中,可以发现所有参数的测量、设置误差和都在10%以内。
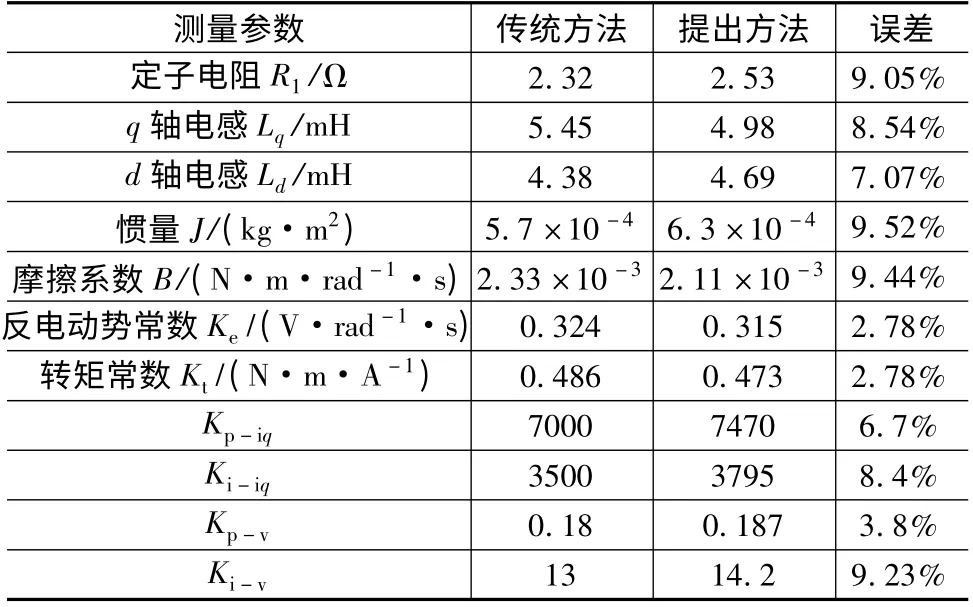
表1 1#样机提出方法与传统方法结果比较
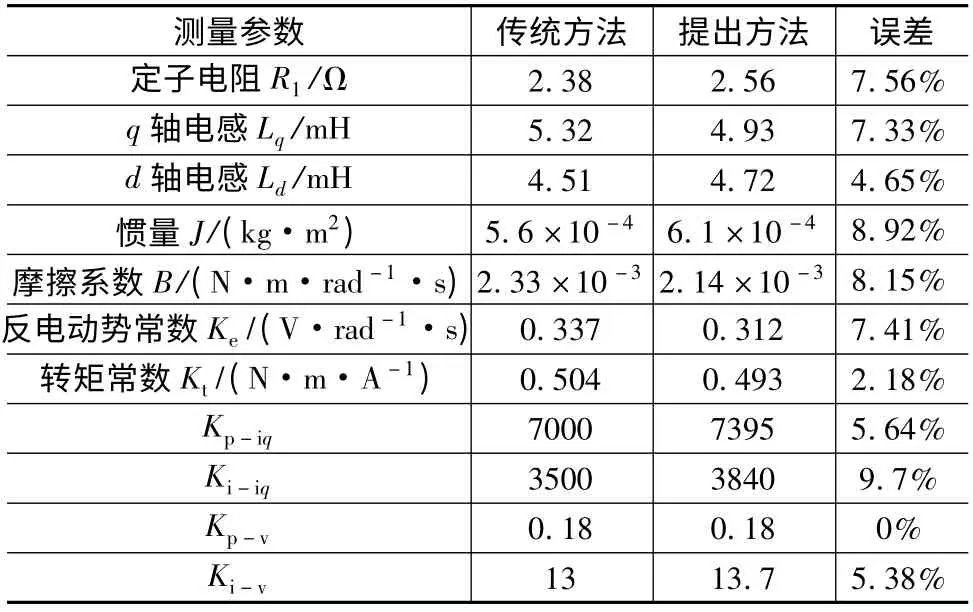
表2 2#样机提出方法与传统方法结果比较
6 结 语
本文介绍了一种针对永磁同步电动机控制系统PI 参数自动设置方法,通过控制器产生一组测试信号,大约需要7.5 s 即可准确地辨识出永磁同步电机的定子电阻、交直轴电感、转矩常数、摩擦系数和转动惯量,并及时计算出电流环和速度环PI 控制器的比例和积分增益,它具有快速、无需特定仪器、自动化程度高、适应任何电机的优点。通过在2 台400 W、8 极的永磁同步电动机控制系统的实验,验证了所提出方法的有效性。
[1] 李烨,严欣平.永磁同步电动机伺服系统研究现状及应用前景[J].微电机,2001,34(4):31-33.
[2] KHATER F,SHALTOUT A,HENDAWI E,et al. PI controller basedon genetic algorithm for PMSM drive system[C]//IEEE ISIE,2009:250-255.
[3] REN Yu,ZHAO Chengyao.Optimal PID controller design inPMSM based on improved genetic algorithm[C]//IEEE ICIMA. 2010:123-126.
[4] JATOTH R K,RAJASEKHAR. ASpeed control of PMSM by hybridgenetic artificial bee colony algorithm[C]//IEEE ICCCCT.2010:241-246.
[5] 丁文双,胡育文.永磁同步电机模糊PID 参数自整定[J].微特电机,2011,39(5):17-21.
[6] 李辉,韩红,韩崇昭,等.基于遗传算法的模糊逻辑控制器优化设计[J].西安交通大学学报,2002,36(4):385-389.
[7] 李晨丹,黄文新.基于遗传算法的永磁同步电动机矢量控制系统的优化设计[J].微电机,2012,45(5):73-76.
[8] 焦竹青,屈百达,徐保国.基于遗传算法的永磁同步电机调速系统PID 参数优化[J]. 电机与控制应用,2007,34(7):34-37.
[9] 陈宏,薛晓明. 永磁同步电机反电动势系数测量方法的研究[J].电测与仪表,2013,50(8):40-43.
[10] 刘军,吴春华,黄建明,等. 一种永磁同步电机参数测量方法[J].电力电子技术,2010,(3):46-48.
[11] 陈荣,邓智泉,刘日宝,等. 基于磁场定向控制的永磁同步电机参数测量[J].河海大学学报,2004,36(26):684-688.
[12] 王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI 控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
[13] 刘栋良,王家军,崔丽丽.永磁同步电机参数自适应调速控制[J].电工技术学报,2011,26(8):159-165.
猜你喜欢
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年12期)2016-04-11
河北地质(2016年4期)2016-03-20
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
