
实用ADRC算法在炉温控制系统中的应用
2015-01-27 06:27徐新乐应小昆施建华
自动化与仪表 2015年4期
徐新乐,应小昆,施建华,曲 强,苏 震
(中国兵器工业新技术推广研究所,北京 100089)
电阻炉的炉温精度是电阻炉最重要的控制指标,对产品质量具有决定性的作用,对设备的能源消耗大小也有着十分重要的影响。由于影响电阻炉温度控制的主要因素包含工件进出炉膛带来的热量突变、加热动力线产生的交流磁场、炉膛温度场的不均匀性、电网波动产生的瞬间干扰脉冲等无规则且耦合的扰动因素,即温度加热过程存在着高度的非线性、高噪声干扰、强耦合,并往往还伴随着某些不确定性,且这些复杂性都难以用精确的数学模型(微分方程或差分方程)来描述,因此,电阻炉的温度控制是一种复杂的过程控制。传统PID控制器本身存在不足,如控制采用简单的线性叠加方式,控制效果难以达到理想要求。采用一些先进的智能算法,如 Salin Smith算法控制[1]、模糊控制[2]、动态矩阵控制[3]、神经网络预测控制[4]等,控制效果有提高,但也不理想。
本文设计的控制系统采用自抗扰控制算法,继承了PID控制的技术精髓——“基于误差来消除误差”,并将内外扰动综合处理,通过扩张状态观测器对其进行估计,在反馈中引入非线性特性来改善控制效果弥补PID控制的不足之处[5],以满足电炉升温速率的要求和补偿电炉参数变化的影响。通过实际结果可看出:相对于PID控制,本文的控制方案具有响应快、超调小、鲁棒性好、节能的特点,改善了温度控制的动态效果,提高了温度控制精度。
1 控制系统设计
本控制系统(简称ADRC系统)的关键是设计好自抗扰控制算法的同时,搭建好控制系统硬件,使得控制系统能够更好地依据所设计的扩张状态观测器ESO[6],将系统中含有的非线性动态、模型不确定性以及外部扰动等加以观测,从而提高系统的鲁棒性和扰动抑制能力。
1.1 控制系统硬件设计
自抗扰控制系统没有现成的产品可用,其软硬件需要设计者根据控制对象及其控制要求自行设计。ADRC系统不仅要对炉温进行控制,还需对炉体其他操作进行控制。系统硬件框图如图1所示。

图1 控制系统硬件框图Fig.1 Hardware diagram of control system
ADRC系统主要有3方面的控制:其一是温度控制,这是系统主要控制对象。温度信号通过热电偶采集,经热电偶变送器将信号传给信号调理单元,汇集到数据采集板PCI1716上,ADRC算法根据数据采集板上信号计算出控制输出信号,通过PCI723输出板控制电力调整器控制信号,调节动力输出大小,从而控制炉温;其二是能源消耗的监控。动力输出中的电流电压信号通过电压变送装置URI、电流变送装置IRI转换成标准信号,经数据采集板传送至上位机,通过计算得出热处理炉的能源消耗;其三是热处理炉其他操作。本控制系统控制的热处理炉为RT2-600-9型台车炉,需要对炉体的炉门、台车等进行操作。这些开关量的操作通过编程,在上位机触摸屏上搭建相应的操作按钮,进而控制炉门的升降及台车的进出。
1.2 自抗扰算法设计
温度控制系统一般为非线性、大滞后系统,控制输入和输出之间存在着非线性的不确定关系,理论推导其数学模型相当困难,最常见的是将温控对象近似成一个带有纯滞后的一阶惯性环节[7]。对于时滞对象的控制,在设计ADRC时,一般把时滞环节近似成一阶惯性环节,这样就人为地提高了被控对象的阶次,导致ADRC可调参数较多。为此,借鉴文献[5]控制一阶惯性加纯延迟系统时对模型简化的思想,将被控对象近似为无时滞的一阶惯性环节[8],即:

其中,ω=f′(·)。
根据状态空间方程(2)来设计LESO。输出变量温度y是直接测量出的数据,所以状态变量x1无需进行观测,只需观测出系统的总扰动f(·),即扩张状态变量x2。因此,根据文献[9]将式(2)设计降阶为LESO,用于估计温控时滞系统的总扰动。
重构系统的扩张状态变量,则一阶LESO可设计为

式中:z2为扩张状态观测量,是扩张状态变量x2的观测估计值。观测器的带宽ω0>0,可调参数,决定LESO的收敛程度。

则式(3)变为

于是,就可得到系统的扩张状态观测量:

可见,适当选择一阶LESO的可调参数ω0和b0,就可快速准确地估计出系统的总扰动f(·)。
2 应用效果分析
本文设计的一阶实用ADRC可调参数有4个,由于缺乏相关的成熟理论,很难精确获得ADRC参数的稳定域,而且也不像PID控制器那样有许多工程的方法来确定参数初值。因此,依据自有的工程经验,并经过一段时间的实验,确定了参数为kp=0.5,kd=6.0,b0=19,ω0=1。 经过一年多时间的实际运用,系统运行平稳、可靠。
2.1 控制品质
为了比较控制系统与本炉体原有PID控制系统(富士PXR温控仪,精度0.5%,具有PID自整定、自适应、模糊控制功能,通过调节可控硅的相位角控制系统的功率输出)控制品质,选用同批次的工件进行实验,其工件材质、形状一致,工艺要求一致,每炉工件数量、工装一致,工件放入时的炉温相当,工件放入时电网负荷基本一致,实验时的环境温度基本一致。根据此方案,详细记录了一炉采用PID控制系统与一炉采用ADRC控制系统工艺运行曲线。
PID系统为抑制超调量,采用了模糊及自适应调节功能,调节时间较长,其最大超调量7.0℃;ADRC系统超调量最高为4.3℃,2套系统的超调量均在工艺允许范围内。ADRC系统的静差为±1℃,PID系统的实际曲线呈上翘趋势,在保温时间将到时,其温差达到了最大(7.0℃),其原因可能是工件蓄热过大,而PID控制系统没能在较短时间内调节过来。这反映出PID系统温度曲线不如ADRC系统的温度曲线平滑、稳定,抗扰动能力不如ADRC系统强,即ADRC系统控制品质高于PID系统。
2.2 能耗
相对于传统的基于扰动消除误差被动型控制系统,ADRC系统是主动型,即通过扩张状态观测器估计扰动对系统输出的影响,提前进行补偿,并且对于不影响系统输出的扰动忽略掉,不进行调整,因而其很重要的一个特点就是节能。依据热处理电炉节能测试标准(GB/T15318-2010),针对本热处理炉请相关节能监察中心进行了节能测试,测试结果如表1所示。

表1 节能测试Tab.1 Energy conservation measurement
从表1中可以看出:热处理电阻炉ADRC系统正火工艺较之PID系统可比用电单耗降低69.59 kW·h·kg-1,降低率 14.50%;淬火工艺可比用电单耗降低 99.95 kW·h·kg-1,降低率 19.96%。事实上,本热处理炉经过近一年的运行,日均耗电量由原来的11000kW·h降低至9300kW·h,日均节电1700kW·h,已为工厂节约电费几十万元。
2.3 鲁棒性
ADRC系统经过近一年的实际应用,性能稳定,节电显著。图2为其中一组近一年的实际产品生产的温控曲线。设定值较之实验时各不相同(较之实验温度高10℃、低60℃不等),最大超调量不超过4.6℃,控制精度均为±1℃,温控曲线光滑。这说明ADRC系统在不同的温度下,控制都较稳定、理想,即系统的鲁棒性好。
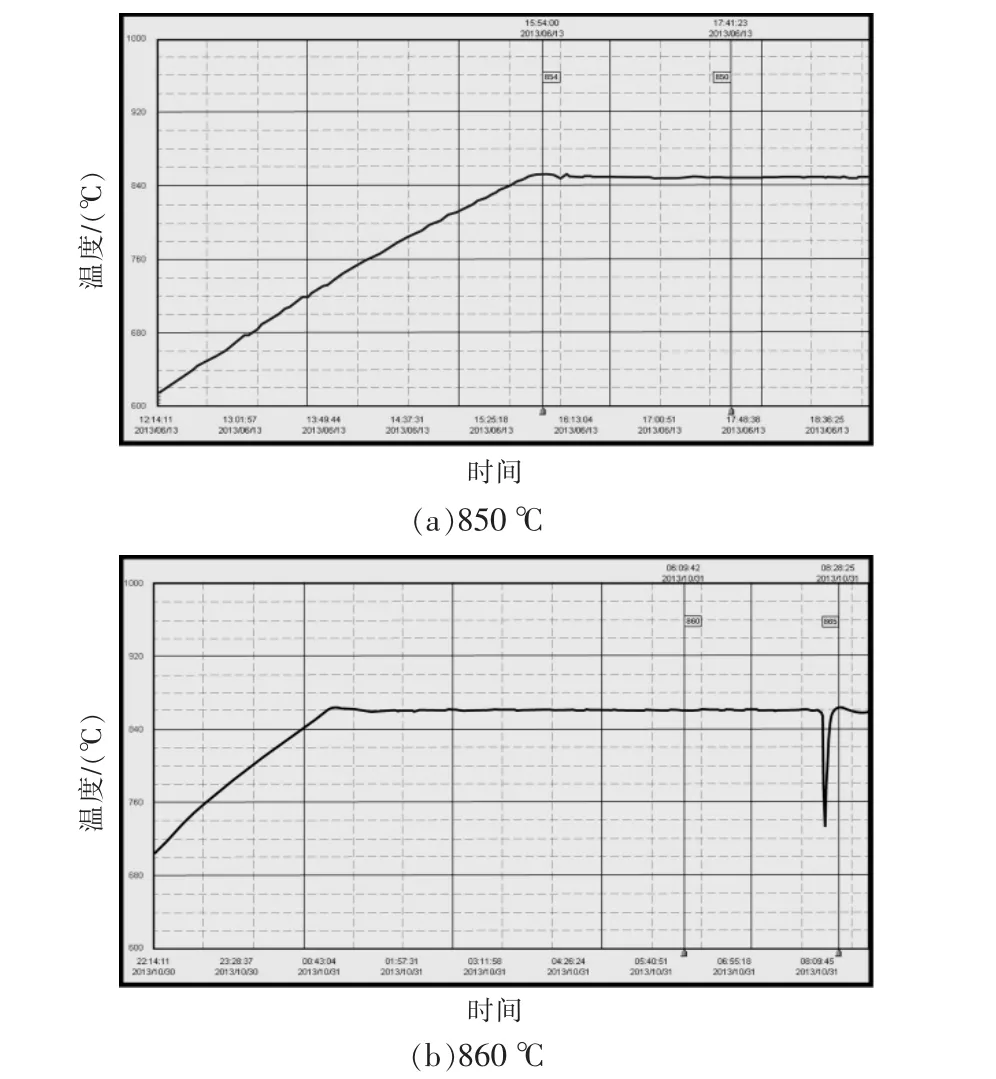
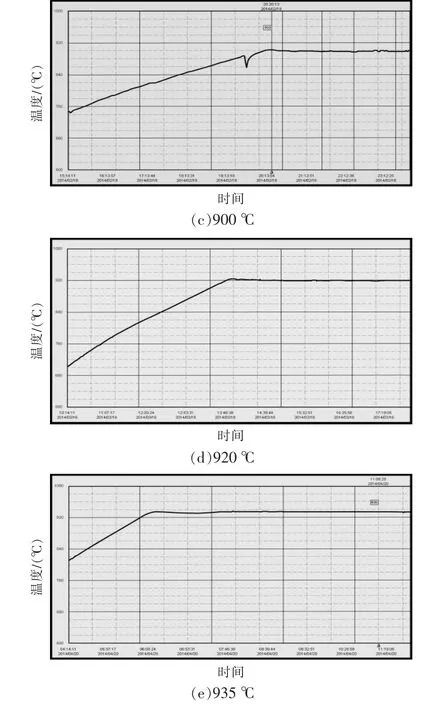
图2 不同温度的实际控制曲线Fig.2 Actual control curve of the different temperature
3 结语
本文将一种实用ADRC控制算法应用于热处理炉温控系统,并与常规的PID系统进行了比较。实验结果表明,ADRC系统调节速率快,但超调量低,节省能源,总体节电率在10%以上,具有较强的鲁棒性。当炉温动态特性改变时,ADRC不需要改变参数,就可以达到很好的控制效果,具有较强的抗干扰能力。
本文采用的一阶实用ADRC的算法简单,可调参数少,能耗指标也明显降低,而且ADRC系统的设计、调试对过程模型精度要求很低,特定情况下甚至只需要粗略定性了解对象特性即可,这给现场应用带来了很大方便。
[l]刘川来,杨朋飞,宁通.基于Dahlin—Smith预估补偿的常压加热炉温度控制系统[J].电子测量与仪器学报,2009,23(2):89-93.
[2]刘大易,赵玉晓.电加热炉温度模糊控制系统设计[J].锅炉制造,2010,22(4):57-60.
[3]孙建平,齐园园.动态矩阵控制在电加热炉温度控制中的应用[J].计算机仿真,2013,30(6):386-388.
[4]万汉伟,龙伟,庞彪,等.神经网络预测控制在分段热处理式电阻炉温度控制中的应用[J].金属热处理,2010,35(8):75-78.
[5]韩京清.自抗扰控制技术一估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2009.
[6]韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[7]陈斌斌.自抗扰控制器在温控系统中的实用化研究及应用[D].济南:山东大学,2008:9-12.
[8]王丽君,童朝南,李擎,等.实用自抗扰控制在大时滞厚度自动监控系统中的应用[J].控制理论与应用,2012,29(3):368-374.
[9]YANG Ruiguang,SUN Mingwei,CHEN Zengqiang.Active disturbance rejection control on first-order plant[J].Journal of Systems Engineering and Electronics,2011,22(1):95-102.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
河南科技(2022年8期)2022-05-31
小学阅读指南·低年级版(2020年10期)2020-10-12
中国铸造装备与技术(2017年6期)2018-01-22
电子制作(2017年13期)2017-12-15
制造技术与机床(2017年3期)2017-06-23
中小企业管理与科技·中旬刊(2016年10期)2016-11-12
电子制作(2016年21期)2016-05-17
探测与控制学报(2015年4期)2015-12-15
中国铁道科学(2015年4期)2015-06-21
