空间机器人发展现状与思考
2015-02-27 08:21林益明李大明王耀兵王友渔
航天器工程 2015年5期
林益明李大明王耀兵王友渔
(1北京空间飞行器总体设计部,北京 100094)
(2空间智能机器人系统技术与应用北京市重点实验室,北京 100094)
空间机器人发展现状与思考
林益明1,2李大明1,2王耀兵1,2王友渔1,2
(1北京空间飞行器总体设计部,北京 100094)
(2空间智能机器人系统技术与应用北京市重点实验室,北京 100094)
介绍了空间机器人的基本概念、特点和发展历程,在简述我国空间机器人技术发展现状的基础上,重点介绍了我国空间站机械臂、嫦娥三号巡视器和嫦娥五号采样机械臂等空间机器人的研制情况。结合我国空间机器人型号研制和技术研发的经验和教训,对我国空间机器人未来发展应关注的一些问题提出了建议。
空间机器人;发展现状;发展思考
1 引言
空间机器人是在太空中执行空间站建造与运营支持、卫星组装与服务、行星表面探测与实验等任务的一类特种机器人。美国航空航天局探索小组(NASA Exploration Team,NEXT)按其执行的任务,将空间机器人分为在轨操作机器人和星表探测机器人两类[1-2],前者包括在轨组装、维护、检查和辅助航天员活动等空间机器人,后者包括巡视移动、样品采集、科学测量和辅助航天员探测等各类机器人。
随着人类空间探索活动的不断深入,航天器的规模和复杂程度达到了前所未有的程度,如“国际空间站”(ISS)包括13个舱段、历时10余年才在轨组装而成,而未来空间太阳能电站的建设需在轨构建尺寸达到千米级的大型空间设施;人类对于深空的探索方兴未艾,月球、火星、小行星等星体探测成为当前热点,探测的深度和广度也达到了一个新的阶段,如机遇号火星车在火星上行程超过40 km,探测时间已达11年之久。此类航天活动,一方面涉及大型复杂航天器的在轨组装与服务,另一方面涉及星体表面大范围的巡视与探测。为确保任务的安全、高效完成,空间机器人成为实现任务的主要工具和手段。
到目前为止,空间机器人已经在“国际空间站”、月球探测和火星探测等任务中得到广泛而成功的应用;此外,国外还通过开展“轨道快车”(Orbital Express)[3]、工程试验卫星-7(ETS-VII)[4]等在轨技术验证项目,尝试利用空间机器人完成在轨故障卫星的维修和服务,进一步将空间机器人的应用范围扩展到在轨服务领域。因此,采用空间机器人代替或协助航天员执行空间任务,不仅是未来空间任务之必需,同时在成本、效率等方面也具有突出的优势[5]。
本文对空间机器人的发展历程进行回顾,简述我国空间机器人的研制情况和研究成果,探讨未来空间机器人的发展需求和发展趋势,在此基础上对空间机器人后续发展需重点关注的技术问题给出了建议。
2 空间机器人的主要特点
空间机器人是在太空中使用的特种机器人,由于其应用环境的特殊性,导致空间机器人本身具有如下特点:
(1)空间环境适应性强。环境条件包括:发射段力学环境、空间高低温、轨道微重力或星表重力、超真空、空间辐照、原子氧、复杂光照、空间碎片等。
(2)长寿命高可靠。需要在星上资源受限的条件下实现长寿命,以及在无维护情况下实现高可靠。
(3)多任务适应能力强。机器人面临的任务包括捕获、搬运、固定、更换、加注、重构、移动等,需集多功能于一体。
(4)经历工况更加复杂。需满足地面验证段、发射段、在轨段(甚至在地外天体着陆段、表面工作段)不同工况,使系统设计约束大幅增加。
(5)地面验证难度大。由于上述特点,再考虑空间机器人自由度多、应用场景存在不确定性等因素,导致地面验证难度大幅增加。
3 国外空间机器人发展现状
1981年,加拿大研制的航天飞机遥控机械臂系统(SRMS)随哥伦比亚号航天飞机入轨[6],成为世界上第一个实现空间应用的在轨操作机器人。之后,德国研制了技术验证机器人ROTEX,对机器人地面遥操作技术进行了全面而深入的验证[7]。1997年,日本发射了世界上第一个自由飞行机器人(ETS-VII),并完成了空间目标抓捕、卫星模块更换等在轨操作技术验证工作[3]。2007年,美国通过“轨道快车”项目也完成了类似的验证[4]。“国际空间站”的建设与运营需求有力地推动了空间机器人技术的发展,2001年“国际空间站”遥控机械臂系统(SSRMS)入轨,2008年加拿大特殊用途灵巧机械臂(SPDM)、日本实验舱机械臂(JEMRMS)相继进入“国际空间站”[8-9],上述机器人在“国际空间站”的建造、维护和舱外实验等方面获得了成功应用。2011年,仿人形机器人航天员(Robonaut-2)进入“国际空间站”,并成功开展了各类灵巧操作的技术验证,证明了机器人在代替航天员执行空间操作方面存在着巨大潜力[10]。目前,基于灵巧操作机器人的航天器在轨组装与服务技术成为各国研究的热点(如美国提出了凤凰计划[11]、德国提出了轨道服务任务[12]等),可以预见,未来在轨操作机器人的发展将更加迅猛。
星表探测机器人的应用最早见于20世纪70年代,苏联月行车-1/2(Lunokhod-1/2)于1970年和1973年相继成功登陆月球[8,13],标志着星表探测机器人进入实际应用阶段。1971年7月30日,由阿波罗15号飞船携带的美国载人月球车(LRV)登陆月球,成为世界上最早实现空间应用的载人月球车[14]。l971年,苏联火星车PROP-M随苏联自动考察站火星-3探测器登上火星,这是世界上第一辆火星探测车[13]。1997年至2004年,美国旅居者号(Sojourner)[8]、勇气号(Spirit)和机遇号(Opportunity)[8,15]火星车先后登陆火星,掀起了火星巡视探测的高潮。2012年,美国好奇心号(Curiosity)[16]着陆火星,成为目前执行任务的功能最为强大的火星车。需要说明的是,美国最新的火星车上均配置了机械臂作为执行探测任务的主要工具,从而使得星表探测机器人具备了强大的星表操作能力。此外,凤凰号(Phoenix)火星探测器上也配置了4自由度的采样机械臂[17],作为执行火壤样品采集任务的核心设备。2005年以来,美国为满足其对月球进行全面深入探测的需要,由喷气推进实验室牵头研制了大型月面移动机器人——全地形适应的六腿式地外探测器(ATHLETE)[18],其主要特点是采用腿式移动方式,并可通过改变构型变化为轮式移动,是一种对行星表面地形适应能力更强的新型星表探测机器人。
国外空间机器人发展历程参见图1和图2。

图1 国外星表探测机器人发展历程Fig.1 Process of development of territorial robots abroad

图2 国外在轨操作机器人发展历程Fig.2 Process of development of space manipulate robots abroad
4 我国空间机器人发展现状
我国空间机器人技术研究开始于20世纪90年代,多年来中国科学院、哈尔滨工业大学、北京邮电大学、北京理工大学、北京航空航天大学、中国空间技术研究院等单位针对空间机器人开展了大量研究,并取得了丰硕的成果。面向我国空间站建造与运营、月球探测、火星探测等工程任务需求,我国自行研制了多套空间机器人系统,部分产品已经实现了空间应用,多项关键技术获得验证。
空间站核心舱机械臂、嫦娥三号巡视器、嫦娥五号月球表面采样机械臂是我国研制的几个典型的空间机器人系统,相关情况介绍如下。
4.1 空间站核心舱机械臂
我国空间站包括核心舱、实验舱I和实验舱II、节点舱(图3),其中,核心舱配置大型机械臂[19]。要求机械臂具有首尾互换的“爬行”功能,通过爬行覆盖舱外大部分操作区域。

图3 我国空间站基本构型Fig.3 Basic configuration of the Chinese Space Station
4.1.1 我国空间站机械臂的主要任务
(1)空间站舱段转位与辅助对接;
(2)悬停飞行器捕获与辅助对接;
(3)支持航天员出舱活动;
(4)舱外各类负载搬运;
(5)舱外状态检查;
(6)舱外设备安装、更换或维修。
4.1.2 我国空间站核心舱机械臂研制面临的难点
(1)空间站质量限制严格;
(2)末端机电同步重复连接次数多;
(3)在轨操作任务地面验证难度大。
4.1.3 我国空间站机械臂研制
在空间站核心舱机械臂研制过程中,技术人员充分调研了国外大型空间机械臂研制情况,立足于国内工业基础,创造性地开展了产品研制工作,突破了高比刚度和比强度材料的设计与应用、关节和末端执行器等核心部件机电热一体化设计、高可靠长寿命空间润滑,以及全工况覆盖的在轨任务地面验证等多项关键技术[20]。我国空间站机械臂与国际大型空间机械臂指标对比情况见表1,可以看出,我国空间站机械臂在末端精度、速度等关键指标上与国际一流水平相近。

表1 我国空间站机械臂与国际大型空间机械臂指标对比表Table 1 Specification comparison of the Chinese space station manipulator and large scale manipulators abroad
4.2 嫦娥三号巡视器
4.2.1 主要任务
嫦娥三号巡视器是我国首个在地外天体表面执行巡视探测任务的新型航天器。嫦娥三号巡视器承担的主要任务包括:①随着陆器实施月球软着陆;②月昼期间,实现月面巡视探测,并携带有效载荷进行就位探测;③月夜期间实现月夜生存。
4.2.2 研制面临的技术难点
由于我国首次研制地外天体表面巡视机器人系统,无以往成功经验借鉴,研制面临一系列技术难题,主要表现在以下3个方面:①巡视器需满足月昼散热和月夜保温双重要求,月面长期生存技术难度大;②首次开展面向工程应用的巡视器移动系统设计,评价与验证均无经验;③月面环境涉及地形、地貌、地质条件、月尘、高低温等,环境模拟及技术验证难度大。
4.2.3 采用的新技术
嫦娥三号巡视器采用了一系列新技术,最终圆满完成了月面巡视任务,主要包括:
(1)国际上首次采取了重力辅助两相流体回路技术,采取了全断电休眠、光照自主唤醒的探测器月面休眠唤醒策略,从而彻底解决了巡视器月面长期月夜生存问题;
(2)创新性地设计了巡视器移动形态和车轮形态,通过大量试验总结提出巡视器运动性能的技术评价体系,实现了月表环境的准确模拟和移动性能的充分验证,在此基础上全面突破巡视器月面移动技术;
(3)构建了国内首个巡视器内场和外场等试验设施,并创造性地提出了巡视探测地面试验方法,制定了巡视探测任务的地面验证试验方案、体系和标准,全面掌握了巡视探测的地面试验技术[21]。
嫦娥三号巡视器与国外类似产品指标对比情况见表2。
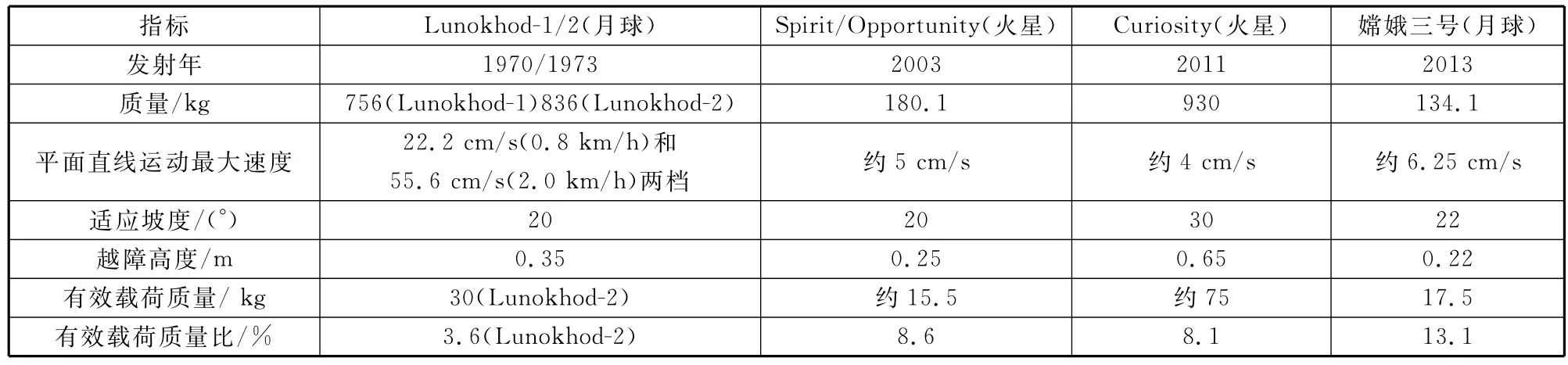
表2 嫦娥三号巡视器与国外类似产品指标对比Table 2 Specification comparison of the Chang'e-3 rovers and similar products abroad
4.3 嫦娥五号月球表面采样机械臂
嫦娥五号探测器是我国探月工程重大科技专项“绕、落、回”三步走战略最后一步实现的关键,其中月球表面采样机械臂又是嫦娥五号探测器任务实现的关键产品,对于我国探月工程全面完成具有重要意义。
4.3.1 主要任务
嫦娥五号月球表面采样机械臂承担的主要任务包括:①到达月面采样区域内任意点实施样品采集;②以多种方式获取月球表面和浅层月球样品;③将样品初级封装容器由着陆器转移至上升器。
4.3.2 研制难点
月球表面采样机械臂研制过程中的技术难点有:①月面样品形态不确定和月壤特性不确定导致的设计和验证困难;②机械臂柔性导致的样品容器高精度抓取难题;③月面高温环境下长时间大负载运动。
4.3.3 采取措施
为确保嫦娥五号成功实现月面采样返回任务,技术人员采取如下应对措施:研制多功能采样器,并制备多种模拟月壤以覆盖月面各类工况,开展机械臂变形标定和变形补偿研究,在材料、零件、组件和整臂多层次上验证机械臂高温负载性能等,以工程的方法较好地解决了技术难题。
5 对空间机器人后续发展的思考
5.1 空间机器人未来工程应用前景
空间机器人主要特点在于它的多任务适应能力和自主性,因而具有更加广阔的应用前景,对于在轨操作机器人来说,其应用领域包括:
1)载人航天领域
主要用于大型载人航天器的构建以及代替或辅助航天员执行各类操作,如“国际空间站”的大型机械臂系统,以及“国际空间站”舱内外仿人操作机器人Robonaut-2。
2)在轨服务领域
既可用于超大型空间设施的在轨建设(如空间太阳能电站),也可用于轨道垃圾清除或故障卫星延寿等。
3)空间科学领域
用于大型科学载荷的在轨建造,如大型空间望远镜等。
对于星表探测机器人来说,其主要应用在深空探测领域,用于执行不同地外天体表面巡视探测、样品采集、科学实验,以及小行星捕获和地外天体基地建设等任务。
5.2 空间机器人产品发展趋势
与上述各领域的应用需求相适应,未来空间机器人产品将向如下方向发展。
1)在轨操作机器人
航天器在轨建造、在轨服务等各种空间操作任务,要求空间机器人在捕获、搬运、释放等简单功能的基础上向抓握、旋拧、插拔、拆装等复杂功能拓展,操作要求也将从低精度、粗放式向精细化、柔顺化发展。因此,未来空间机器人将不再是仅配置一个末端执行器,而是将根据操作需要,配置系列化、标准化的操作工具包;对于更加复杂的操作,双臂或多臂协同操作将成为更好的选择。同时,随着机器人智能化程度的进一步提高,空间机器人将不再是仅依赖于人类的遥操作来工作,而是将成为具备自主感知、规划与控制能力的空间智能系统。
2)星表探测机器人
人类对于空间的探测永无止境,深空探测必将从月球、火星向其它地外天体扩展,对于星表探测机器人来说,一方面需考虑多样的、特殊的行星环境,如温度、气候、地质条件等,另一方面需提升机器人本身的性能,如移动速度、探测范围、地形地貌适应能力和自我恢复能力等。与探测对象的扩展相适应,对执行采样功能的机器人来说,多样品适应性、多功能一体化、多设备支持能力是发展的重点。与在轨操作机器人一样,星表探测机器人也将进一步提升自主性,并逐步由单机器人探测向多机器人联合探测方向发展。
5.3 空间机器人工程实现中的几项关键技术
从技术发展的角度来看,空间机器人的未来广泛应用,不仅要解决理论问题,而产品实现的工程技术问题同样是未来空间机器人必须优先解决的问题。
1)耐空间环境及长寿命、高可靠设计技术
空间机器人是在航天器上使用的特种机器人,因此,空间环境适应性设计是空间机器人设计的核心内容之一,设计时需兼顾航天器发射段环境、轨道环境、行星表面环境等约束条件。此外,空间机器人作为航天器上的一类特殊载荷,不仅要支持航天器多任务的实现,还需满足无维护条件下长期服役的高可靠要求,因此,空间机器人系统设计一方面需充分考虑航天器上的有限资源进行优化设计,另一方面需在航天器可承担的前提下,通过冗余、裕度、降额等设计手段提高系统可靠性。
2)空间机器人轻量化、高精度实现技术
对于空间产品,确保性能的前提下实现轻量化是最终目标。高比刚度、高比强度材料的应用是优先采用的设计方法,同时,基于数值计算的各种优化设计方法,也是轻量化设计的重要手段之一。机电产品的高精度实现除了提高加工精度要求之外,还需要精密装配作保证,确保良好的工艺性是高精度机电产品实现的前提。
3)空间机器人控制系统设计技术
空间机器人是智能化的空间系统,可依据所获得的感知信息进行自主规划和控制。控制算法的设计首先要考虑星上计算资源的限制,同时要充分考虑空间机器人轻质、重载导致的大柔性特点,以及在轨操作对力、位的高精度要求。对于未来性能先进的空间机器人来说,不仅需要研究鲁棒性好的高速控制算法,也需要研究可支持高速实时计算、高可靠性的控制电路,例如解决适应空间环境的高速总线专用芯片问题。
4)空间机器人系统地面验证技术
空间机器人的多自由度、多任务和特殊应用环境给地面验证带来了极大的困难。如机器人必需的视觉和力觉传感器在空间环境下的可靠成像和稳定测量验证问题,大负载机器人的零重力、低重力环境下三维操作验证问题,星表探测机器人的低重力、真空、高低温、粉尘多因素耦合下的移动性能测试问题,以及行星特殊环境采样操作验证问题等。这些问题都是空间机器人任务成功的前提条件,需要技术人员加以重点考虑和解决。
6 结论
综上所述,可以得出以下结论:
(1)空间机器人技术是空间技术当前和未来发展的热点之一,我国经过科研人员多年的不断努力,目前已经具备基于空间机器人技术完成国家重大科技专项任务的能力;
(2)空间机器人及其相关技术未来面临广阔的发展空间,多功能化、多任务支持能力、环境适应能力和自主性是空间机器人未来发展的重点;
(3)实现空间机器人工程仍面临一系列技术挑战,空间环境适应性和可靠性设计、轻量化高精度机电产品、先进的控制算法和硬件以及系统地面验证方法,需要技术人员重点关注。
(References)
[1]L Pedersen,D Kortenkamp,D Wettergreen,et al. NASA Exploration Team(NEXT)space robotics technology assessment report[M].Moffett Field:Ames Research Center,2002
[2]L Pedersen,D Kortenkamp,D Wettergreen,et al.A survey of space roboics[C]//Proceeding of the 7th International Symposium on Artificial Intelligence,Robotics and Automation in Space(i-SAIRAS).Nara:Japanese Aerospace eXploration Agency(JAXA),2003
[3]Mitsushige Oda.Space robot experiments on NASDA's ETS-VII satellite-preliminary overview of the experiment results[C]//Proceedings of the 1999 IEEE International Conference on Robotics and Automation.New York:IEEE,1999
[4]Andrew Ogilvie,Justin Allport,Michael Hannah,et al.Autonomous robotic operations for on-orbit satellite servicing,695809-1-12[C]//Proceedings of the SPIEThe International Society for Optical Engineering.Albuquerque:STAIF,2008
[5]NASA.Robotics,tele-robotics and autonomous systems roadmap(Technology Area 04)[R].Washington D.C.:NASA,2012
[6]Michael Hiltz,Craig Rice,Keith Boyle,et al.CANADARM:20 years of mission success through adaptation[R].Houston:NASA Johnson Space Center,2001
[7]Gerd Hirzinger,Bernhard Brunner,Johannes Dietrich,et al.Sensor-based space robotics-ROTEX and its telerobotic features[J].IEEE Transactions on Robotics and Automation.1993,9(5):649-663
[8]Bruno Siciliano,Oussama Khatib.Handbook of robotics[M].Berlin:Springer,2008
[9]Elliott Coleshill,Layi Oshinowo,Richard Rembala,et al.Dextre:improving maintenance operations on the International Space Station[J].Acta Astronautica,2009,64:69-874
[10]Thomas D Ahlstrom,Myron A Diftler†,Reginald B Berka,et al.Robonaut 2 on the International Space Station:status update and preparations for IVA mobility[C]//AIAA SPACE 2013 Conference and Exposition.Washington D.C.:AIAA,2013
[11]David Barnhart,Brook Sullivan,Roger Hunter,et al. Phoenix project status 2013[C]//AIAA SPACE 2013 Conference and Exposition.Washington D.C.:AIAA,2013
[12]T Boge1,T Wimmer,O Ma,et al.EPOS―using robotics for RvDsimulation of on-orbit servicing mis-sions[C]//AIAA Modeling and Simulation Technologies Conference.Washington D.C.:AIAA,2010
[13]刘兴杰,江磊,杨树岭,等.星球车行走系统和它的研制者们——俄罗斯篇[J].机器人技术与应用,2008(3):17-19 Liu Xingjie,Jiang Lei,Yang Shuling,et al.Planetary rovers and their manufacturer—Russia[J].Robot Technique and Application,2008(3):17-19(in Chinese)
[14]江磊,姚其昌,何亚丽,等.星球车行走系统和它的研制者们——美国篇[J].机器人技术与应用,2008,3:14-16 Jiang Lei,Yao Qichang,He Liya,et al.Planetary rovers and their manufacturer—America[J].Robot Technique and Application,2008(3):14-16(in Chinese)
[15]R A Lindemann,D B Bickler,B D Harrington.Mars exploration rover mobility development-mechanical mobility design,development,and testing[J].IEEE Robotics&Automation Magazine,2006,6:19-26
[16]J P Grotzinger,J Crisp,A R Vasavada,et al.Mars Science Laboratory mission and science investigation[J].Space Science Reviews,2012,170:5-56
[17]Robert Bonitz,Lori Shiraishi,Matthew Robinson,et al.The Phoenixmars lander robotic arm[C]//IEEE 2009 Aerospace conference.New York:IEEE,2009
[18]Brian H Wilcox.ATHLETE:lunar cargo handling for international lunar exploration[C]//AIAA SPACE 2010 Conference&Exposition.Washington D.C.:AIAA,2010:1-7
[19]周建平.我国空间站工程总体构想[J].载人航天,2013,19(2):1-10 Zhou Jianping.Chinese space station project overall vision[J].Manned Spaceflight,2013,19(2):1-10(in Chinese)
[20]李大明,饶炜,胡成威,等.空间站机械臂关键技术研究[J].载人航天,2014,20(3):238-242 Li Daming,Rao Wei,Hu Chengwei,et al.Key technology review of the research on the space station manipulator[J].Manned Spaceflight,2014,20(3):238-242(in Chinese)
[21]贾阳,申振荣,庞彧,等.月面巡视探测器地面试验方法与技术综述[J].航天器环境工程,2014,31(5):464-469 Jia Yang,Shen Zhenrong,Pang Yu,et al.A review of field test methods and technologies for lunar rover[J].Spacecraft Environment Engineering,2014,31(5):464-469(in Chinese)
(编辑:张小琳)
Current Status and Analysis of Space Robot
LIN Yiming1,2LI Daming1,2WANG Yaobing1,2WANG Youyu1,2
(1 Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
(2 Beijing Key Laboratory of Intelligent Space Robotic Systems Technology and Applications,Beijing 100094,China)
This paper introduces basic concept and develoment process of space robots,on the basis of current status review of Chinese space robots,research and development of Chinese space station manipulator,Chang'e-3 lunar rover and Chang'e-5 sampling manipulator are introduced in detail.In reference of the experiences and lessons learned in the engineering and technology development,several key problems in future work are concluded.
space robot;current development status;development analysis
V423.7
:ADOI:10.3969/j.issn.1673-8748.2015.05.001
2015-08-14;
:2015-09-17
林益明,男,博士,研究员,北京空间飞行器总体设计部部长,空间智能机器人系统技术与应用北京市重点实验室学术委员会主任,研究方向为空间飞行器总体设计、空间机器人系统。Email:iamwyb@163.com。
猜你喜欢
军事文摘(2022年18期)2022-10-14
军事文摘(2022年12期)2022-07-13
小天使·三年级语数英综合(2022年4期)2022-04-28
军事文摘(2021年18期)2021-12-02
当代工人(2020年8期)2020-05-25
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07