
基于离合器接合速度的重型越野车辆起步控制研究
2015-02-28 10:46苗成生刘海鸥赵亦农岳甫营陈慧岩
兵工学报 2015年5期
苗成生,刘海鸥,赵亦农,岳甫营,2,陈慧岩
(1.北京理工大学 车辆传动国防科技重点实验室,北京100081;2.上海汽车集团股份有限公司 技术中心,上海201804)
0 引言
自动机械变速器(AMT)是基于干式离合器和传统机械变速器的自动变速器,受干式离合器传递扭矩特性的影响,起步过程中离合器控制一直是AMT 控制的难点[1-2]。离合器的自动控制需同时满足乘坐舒适性、接合快速性和低磨损等要求,而这些要求是各不相同甚至是相互冲突、互相矛盾的。为最大限度的达到控制目标,基于模型的离合器控制策略被广泛应用,如经典控制理论、最优控制和鲁棒控制[3-6]等。
在干式离合器控制方面虽已开展了大量的研究工作,但是仍存在一些问题值得进一步研究,如局部可观条件下控制参量的选取、控制参量阈值的确定、控制效果评价的微观分析等。
本文以某AMT 重型越野车辆为研究平台,通过离合器动力学分析及控制参量的选取,设计了起步过程基于离合器接合速度的分段控制策略,设计了分段控制模型,并利用试验数据库统计获得分段控制的主要参数阈值。平路实车试验结果表明,该分段最优控制可在满足滑摩状态要求的前提下,实现平稳快捷的起步控制品质,为后续开展适应全工况的优化控制奠定了基础。
1 车辆起步过程分析
1.1 起步过程动力学模型
起步过程中,由于离合器开始接合前已完成挂挡操作,可认为变速器至车轮间的传动系部分具有固定的动力学特性。在相关假设的前提下[7-8],按照动力传递关系和力学分析中取自由体的方法,可将动力传动系简化为两个自由体:发动机动力输出至离合器主动部分、离合器从动部分至驱动轮。建立简化的动力学模型如图1所示。
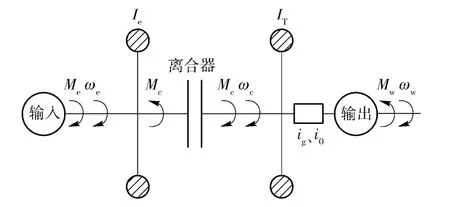
图1 动力传动系的简化模型Fig.1 Simplified model of drive system
图1中:Me、Mc、Mw分别为发动机扭矩、离合器传递扭矩和驱动轮受到的阻力矩(N·m);ωe、ωc、ωw分别为曲轴角速度、离合器从动盘角速度、车轮角速度(rad/s);Ie和IT分别为发动机飞轮、曲轴以及离合器主动部分等部件换算到曲轴上的转动惯量和离合器从动部分、变速系统以及整车等效到变速器输入轴上的转动惯量(kg·m2);ig为变速器的传动比;i0为主减速器及轮边减速器速比之积。
该动力传动系模型可表示为
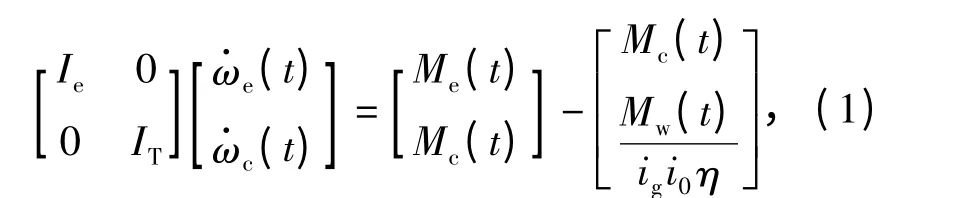
式中:Ie取值3.40 kg·m2;IT取值2.33 kg·m2;i0取值4.54;η 取值0.79.
由(1)式可知,在油门、挡位、路况等因素确定的情况下,合理控制离合器传递扭矩变化即可实现对从动盘转速的有效控制。离合器工作过程传递扭矩的通用表达式为

式中:μ 为摩擦系数;F 为压盘施加在摩擦片上的压紧力大小(N);lc为离合器行程(mm);Rc为摩擦片的有效摩擦半径;Z 为摩擦面数。
由(2)式可知,控制离合器传递扭矩变化的直接途径是控制lc的变化率,即离合器的接合速度。
1.2 起步过程评价指标
主要从平稳性和快捷性两方面评价起步过程。
1.2.1 平稳性评价
以冲击度作为平稳性的评价指标。冲击度是车辆纵向加速度的变化率,影响车辆的乘坐舒适性和传动系构件的使用寿命[8]。在实际应用中,对冲击度的直接测量是较为困难的,一般采取间接测量方法,其中基于转速的间接测量法已得到广泛应用。在试车过程中,通过随车数据采集系统采集变速器输出轴转速no,进一步对no二阶求导获得冲击度的数据,用来评价起步过程的品质,使用这种方法进行冲击度计算的公式为

式中:r 为车轮半径。
不考虑常量系数部分,取无量纲的参考量作为当量冲击度来表征起步过程的冲击大小,通过两次差分求导的方法计算当量冲击度数值jd,即
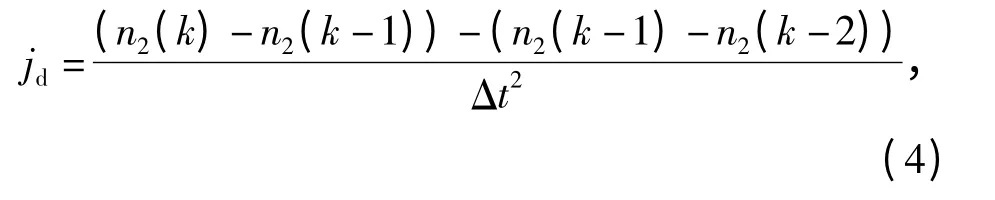
式中:n2(k)为第k 采样点的变速器输出轴转速值,试验中转速采样周期为10 ms. 当量冲击度本身为无量纲参数,为合理控制其数值范围,取Δt=1 s.
通过试验总结,并结合经验驾驶员的主观评价,当量冲击度jd对应的平稳性控制效果主要分为4 个等级,如表1所示。
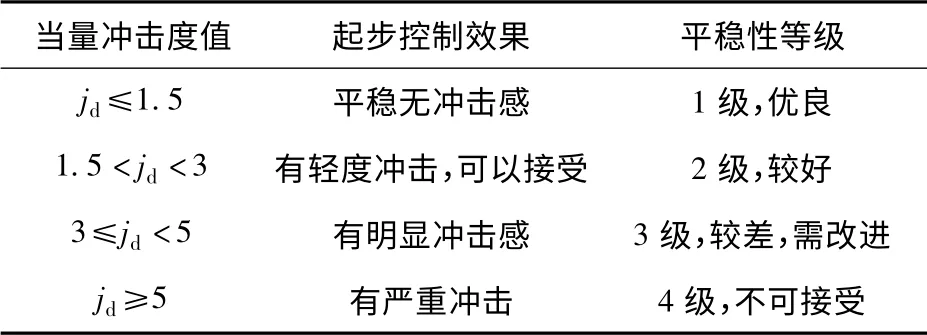
表1 平稳性评价等级Tab.1 Evaluation level of smoothness
1.2.2 快捷性评价
以起步时间和滑转圈数作为快捷性的评价指标。
1)起步时间。以起步时间ts作为快捷性评价的主要参数。依据重型越野车辆的自身特点,将快捷性分为4 个等级,如表2所示。
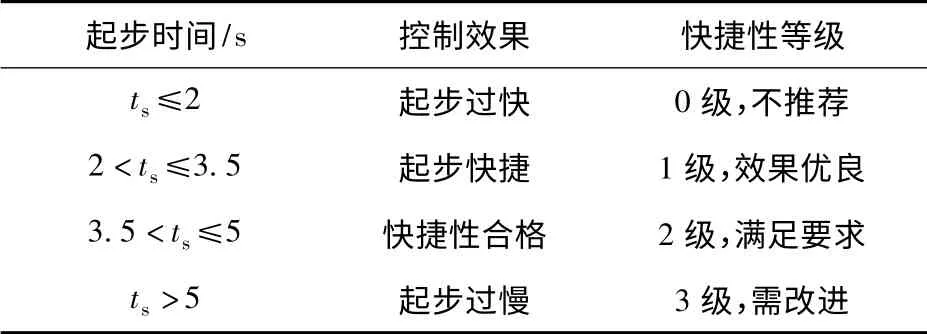
表2 快捷性评价等级Tab.2 Evaluation level of quickness
为进一步细化起步过程的快捷性和滑摩状况,将起步接合过程分成车辆静止阶段和车辆起步—加速阶段,两部分的分界点即为车辆开始运动的时刻。车辆静止阶段又可称为起步等待阶段,该阶段的持续时间以tw表示。tw在一定程度上可以反映车辆的起步响应特性,它是驾驶员比较关注且容易感知的参数,也是影响快捷性主观评价结果的重要因素。tw值越小,起步等待时间越短,起步响应特性越好。本文将基于该参数的快捷性评价结果分为4 种情况,如表3所示。
2)滑转圈数。以离合器主、从动片相对滑转圈数S 作为滑摩状态的评价参考量。S 指车辆起步过程,离合器主、从片相对滑转的圈数(r). S 与起步过程的转速控制有关,对于同型号的试验车辆,当油门保持一致时,该值大小可反映起步过程的离合器滑摩状况。为方便计算,离合器同步的条件设定为主、从动片转速差小于50 r/min. 当转速采样周期为10 ms 时,S 可用(5)式估算:
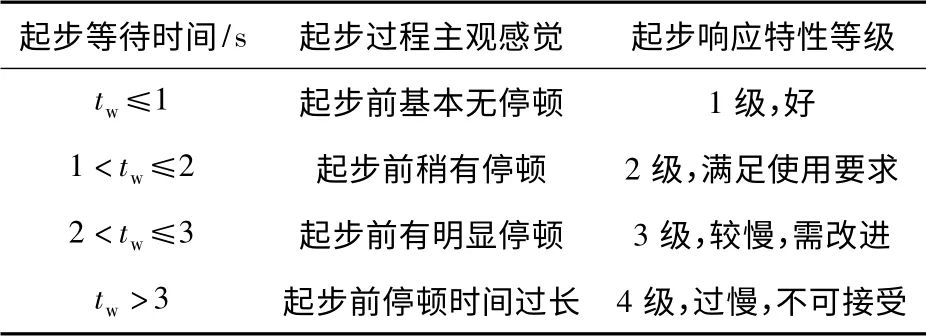
表3 起步响应性评价等级Tab.3 Evaluation level of launch response

式中:k1和k2分别为车辆起步时刻和离合器同步时刻对应的采样点序号;ne(i)和nc(i)分别为发动机转速和离合器转速。
以基于相对滑转圈数的起步滑摩状况评价,前提条件限定为:起步过程不踩油门,怠速(600 r/min)起步。具体等级划分如表4所示。

表4 滑摩特性评价方法Tab.4 Evaluation of sliding friction characteristics
2 起步分段控制策略
2.1 控制参考量选取
控制参考量是指导控制程序合理运行的参考变量,是合理控制策略的必备要素。选取时应遵循方便获取、稳定可靠、实时性等原则,为此本文选取转速信号、位移信号及其衍生信号为控制参考量。
李镇西老师说:“让人们因我的存在而感到幸福。”学生及家长群里均是一致为此次自评与他评的活动点赞,有些学生还说,看了统计数据,后悔自己当初写得还不够用心,字太丑。因为是寒假,不少学生都表示这个是比红包还让人开心的新年礼物,而且很有纪念意义,特别是某些同学还很用心地画了素描或漫画肖像,温暖而贴心。不少家长说,原来自己的儿女在同学、朋友中为人处世还蛮多优点,自己平时真的难有机会发现,感谢老师、同学们的用心。让学生及其家长看了那些用心的自评与他评而感动快乐,我也感受到了班级的幸福指数直线上升,新年里班级Q群中氛围轻松愉悦。
2.1.1 转速信号相关控制参考量
转速信号及其衍生信号见表5所示。转速信号相关参考量能较好地反映离合器接合过程相关部件的本质特性,同时不受路况环境以及离合器磨损等因素的影响。
2.1.2 离合器接合位置信号相关控制参考量
离合器接合位置信号反映了离合器接合程度以及摩擦片承受压紧力的大小,对于分析离合器传递扭矩变化有重要的参考价值。车辆起步的离合器预设半接合点[7]是由离合器位置信号表征的。同时,对行程差分求导得到的接合速度可以实现整个系统的闭环反馈控制。
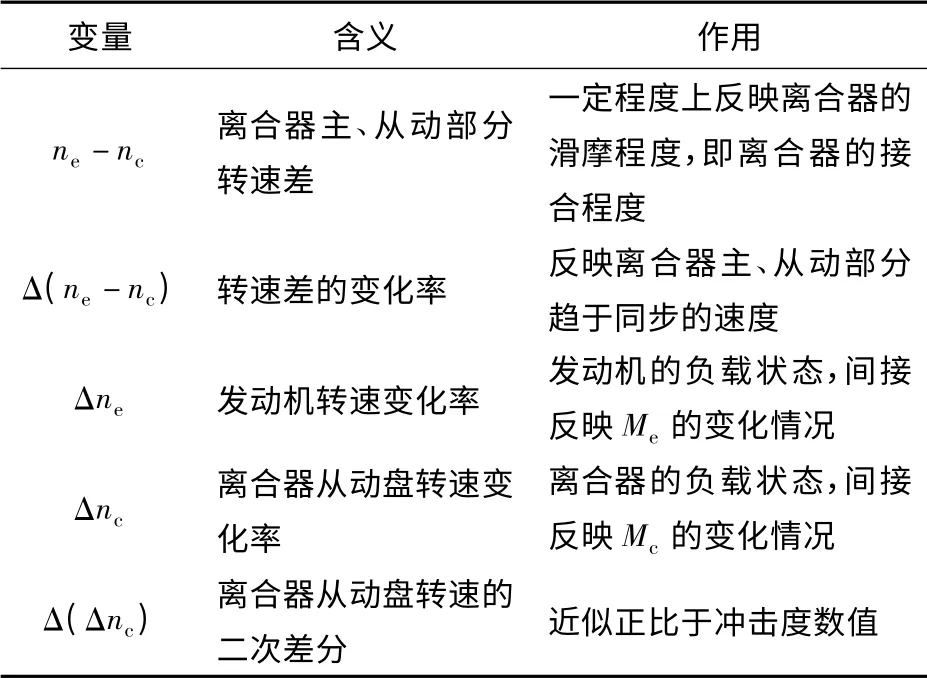
表5 转速信号及其衍生信号Tab.5 Speed signals and its derivative signals
2.1.3 其他辅助控制参考量
油门信号能体现驾驶员的驾驶意图,油门信号和发动机转速信号可用来反映发动机的负荷状态[9]。
离合器接合时间用作控制参考量,不仅能在一定程度上反映滑摩状态,更重要的是,能在分段控制中作为约束条件,避免控制超时引起离合器损坏等现象的发生。
2.2 离合器接合控制阶段分析
本文在传统的“快—慢—快”3 段式控制方法的基础上[8-10],将其进一步细化为7 个控制阶段,实现对离合器起步过程的精确控制,如图2所示。
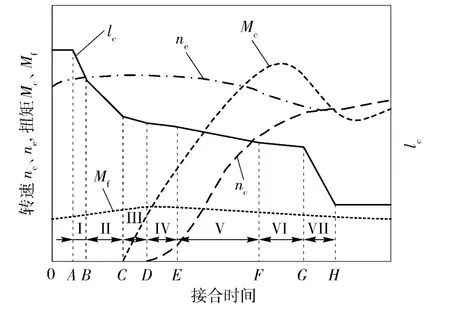
图2 离合器接合阶段划分Fig.2 Engaging stage division of clutch
从图2可以看出,本文所划分的7 个阶段具体为:无扭矩传递阶段(AC,阶段Ⅰ和Ⅱ)、滑摩初始阶段(CD,阶段Ⅲ)、滑摩后半阶段(DG,阶段Ⅳ、V、Ⅵ)和同步后扭矩储备阶段(阶段Ⅶ)。各个阶段的控制参考量、约束条件和控制目标见表6所示。
2.3 起步分段控制策略
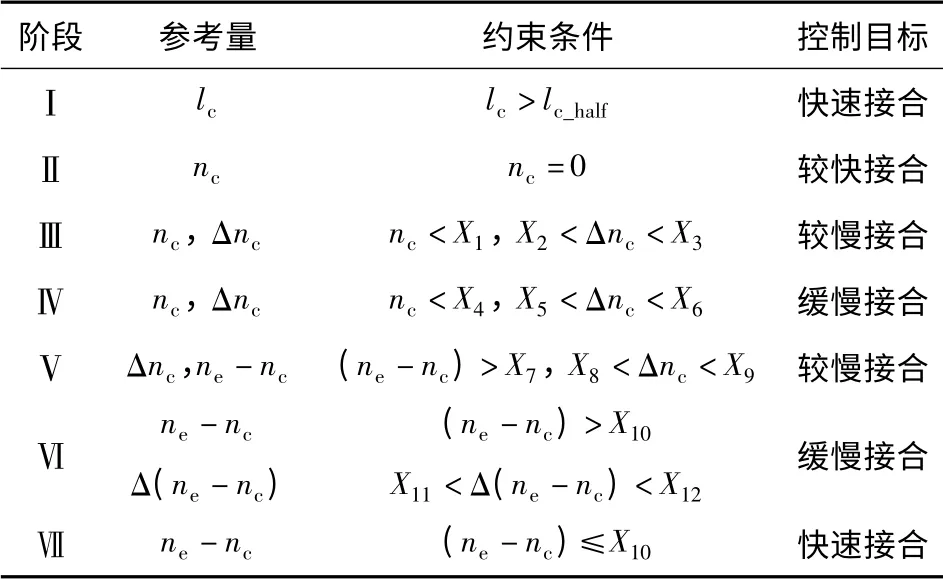
表6 离合器分段控制内容Tab.6 Segmented control contents of clutch
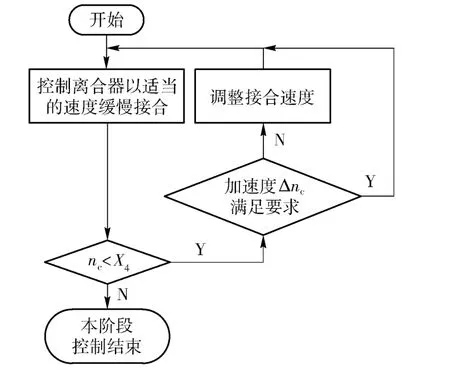
图3 阶段Ⅳ离合器控制框图Fig.3 Control block diagram of clutch at phase Ⅳ
图3中:X4代表车辆的预设边界值;Δnc为差分求导所得等效加速度,表征了车辆的加速能力。
2.3.1 基于接合速度控制方式的闭环反馈控制
通过控制参考量的利用,控制目标和约束条件的设定,实现对起步过程的闭环反馈控制[11-12]。图4所示为离合器分段控制的基本原理。
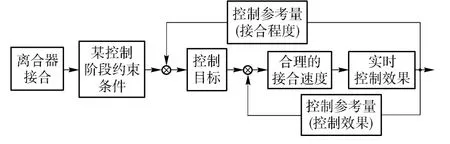
图4 离合器分段控制原理Fig.4 Subsection control principle of clutch
离合器接合过程中,当满足某阶段约束条件时,离合器接合进入该控制阶段,控制程序依据该控制阶段的特点设定相应的理想控制目标,继而通过调用相关控制参数获得理想接合速度。同时,实时控制效果信息反馈回自动变速箱控制单元,一方面监测该接合阶段是否完成,即接合程度是否已超出约束条件;另一方面,通过对比实际控制效果与理想控制效果的差别,适当调整接合速度,以实现实时修正控制,使控制效果趋于理想控制目标。
2.3.2 控制策略中的经验规律部分
离合器自动控制规律用来模拟经验驾驶员,主要依靠经验规律获取相关经验值。各阶段理想接合速度的设定将直接影响起步控制效果。经验数值主要来源于人工驾驶规律的采集试验,并经受了大量里程试验的考核,具备较高的可靠性和准确度。
3 离合器分段控制模型
3.1 控制模型的建立
以离合器分段控制策略为理论基础,结合离合器操纵系统特性[9],通过相关数据分析处理及试验验证工作,建立了基于离合器接合速度的起步分段控制模型,如图5所示。

图5 分段控制建模Fig.5 Model of subsection control
分段控制建模综合了大量的理论分析、数理统计以及试验修正等研究工作。其中的关键环节包括:
1)理想接合速度的设定。理想接合速度是为控制策略服务并能充分实现控制意图。从实际应用考虑,相邻两阶段理想接合速度差值不能过大,某阶段理想接合速度的设定要充分考虑前一阶段接合速度对本阶段的影响、本阶段接合速度对下一阶段的影响,尽量减小因接合速度调节带来的控制效果不确定性,提高系统的可控性,进而改善控制效果。
接合速度经验值是由大量实车数据经过数理统计分析后得到的,它代表了离合器经验操纵规律,是设定理想接合速度时的重要参考。
2)接合速度阈值设定。考虑实际控制系统波动特性问题,控制模型必须将合理的控制效果偏差考虑在内。接合速度阈值接合速度所允许的波动范围,是控制模型的重要组成部分。合理的阈值是保证控制模型精度和实用性的重要因素,设定的基本原则为:本阶段理想接合速度越大,阈值越大;前一阶段接合速度越大,本阶段阈值相应也越大。
3.2 各阶段接合速度及阈值的设定
3.2.1 理想接合速度设定
理想接合速度的设定方法可用图6表示。
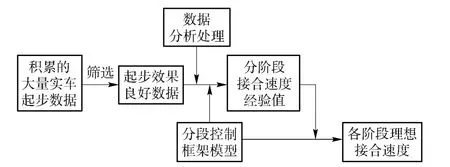
图6 理想接合速度设定方法Fig.6 Ideal engaging speed setting method
模型中共有5 个控制阶段需要设定接合速度(阶段Ⅰ和Ⅶ以机构运行的最大接合速度接合即可)。从AMT 试验数据库[7]的大量起步数据中提取出了150 组起步效果良好的样本数据,对各阶段的平均接合速度进行计算,图7所示为数据统计结果。
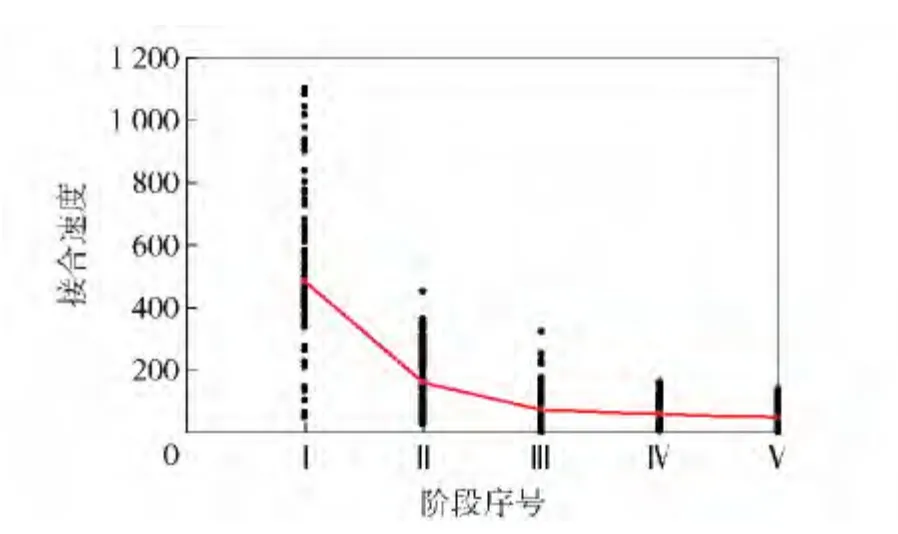
图7 离合器接合速度分布Fig.7 Distribution of clutch engaging speed
图7中,横轴序号Ⅰ~Ⅴ分别对应5 个控制阶段;纵轴对应平均接合速度,该数值是无量纲的当量值。图中每个数据点代表了某组起步数据中对应控制阶段的平均接合速度,即每个横轴序号均对应了约150 个数据点(某些数据点因速度相同而重合)。
为避免少数大值数据对数理统计带来的较大影响,将统计数据进行筛选,得到如图红线所示统计结果。红色点连线的5 个点为对应各阶段加权处理后的接合速度经验值,其中加权值主要取决于起步路面状况。实车数据中主要包含了3 种起步路面:硬土路面、水泥路面、松软土路面,考虑到该越野车的使用特点以及起步路面的使用频率等因素,硬土路面接合速度加权值为0.5,其他两种路面下接合速度加权值为0.25. 综上所述,某阶段的接合速度经验值计算公式为
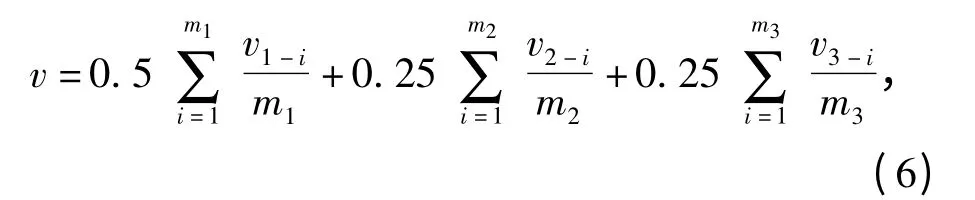
式中:m1、m2、m3分别为3 种路面上的起步数据个数;v1-i、v2-i、v3-i分别为3 种路面上起步数据中对应阶段的接合速度值。最终确定各个阶段的理想接合速度如表7所示。
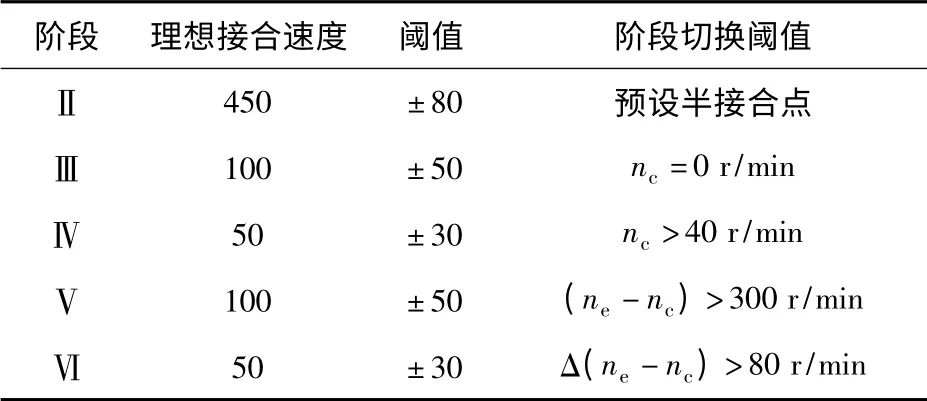
表7 模型参数设置Tab.7 Model parameters setting
3.2.2 接合速度阈值设定
阈值设定主要考虑离合器接合控制中允许的速度误差,同时必须结合系统本身的特性波动。最终,基于上述设定方法及台架试验验证,所设置的模型参数如表7所示。同时,表7还给出了各个阶段的约束条件。
4 实车试验结果及分析
根据上述基于接合速度的控制方法,控制车辆在平直路面进行起步试验,并从平稳性和快捷性两方面对控制效果进行分析。
4.1 实车试验平台
试验车辆为某重型越野车辆,该车配备电控液动AMT 系统,其主要参数如表8所示。
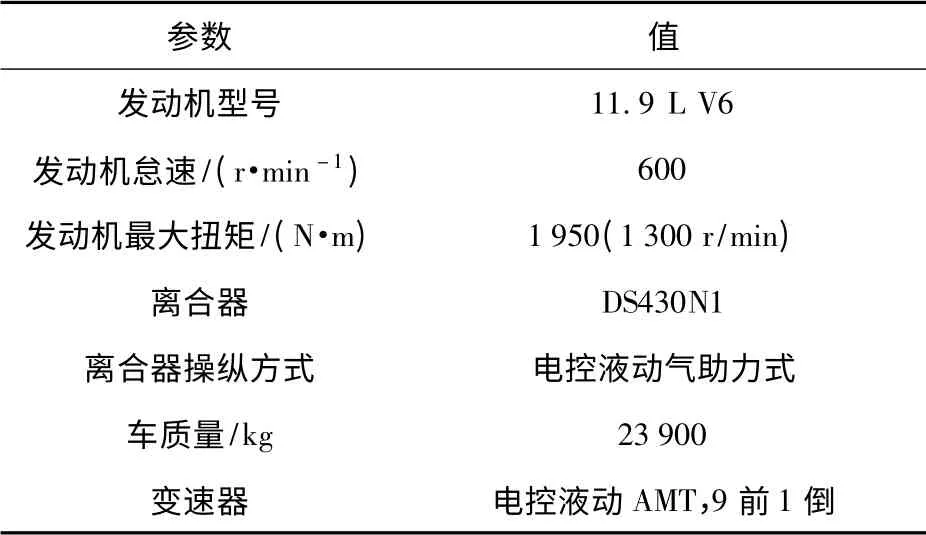
表8 AMT 重型越野车辆主要参数Tab.8 Main parameters of AMT vehicle
其中,离合器自动操纵系统采用电控液动式,如图8所示,比例流量阀具有流量随电流变化的特性[7],其工作电流的调节采用脉冲宽度调制(PWM)控制方式,输出0 ~2 A 之间的目标电流值。
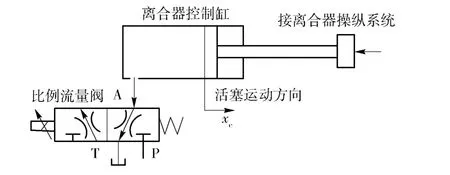
图8 离合器自动操纵系统原理图Fig.8 Schematic diagram of clutch automatic control system
4.2 试验结果及分析
将所设计的分段控制策略用于上述AMT 重型越野车辆,并进行了实车平路起步试验。某次试验结果如图9所示。计算获得相关参考量数值,如表9所示。
另外,本文还进行了不同油门开度α 下的车辆起步试验,结果如图10 所示。由图10 起步效果对比图可以看出,随油门增大,起步过程中,离合器进入慢接合控制时对应的接合深度越深,虽然冲击有增大的趋势,但可以看出车辆加速度也有增大的趋势,即动力性有不断提高的趋势,而且车辆的冲击情况仍能满足使用要求。起步时间上,小油门为3. 3 s,中等油门和大油门下约为2. 5 s.
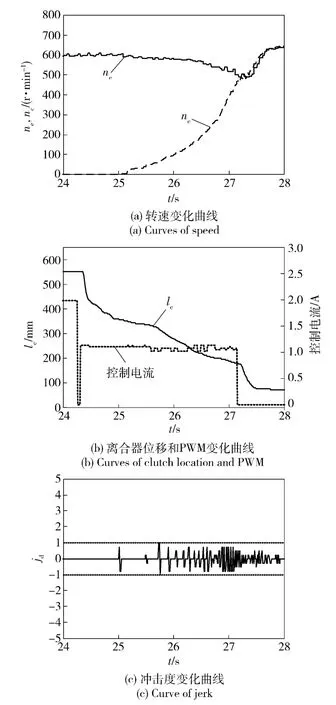
图9 起步过程实车数据Fig.9 The starting process data
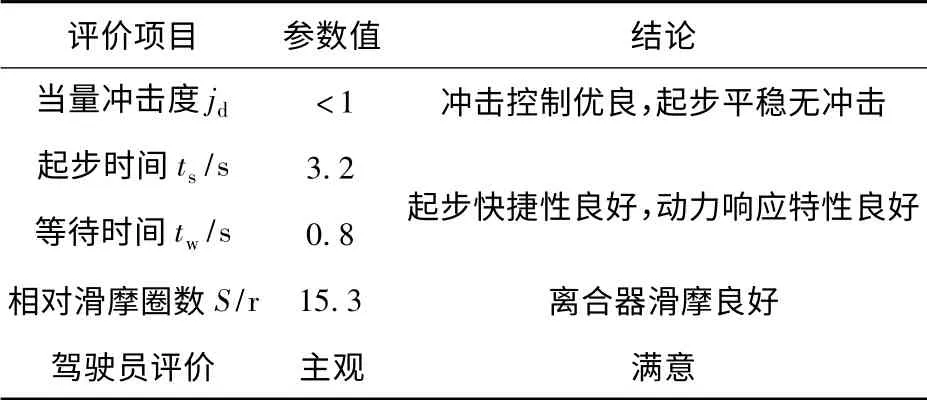
表9 某起步过程控制效果相关参数Tab.9 Relevant parameters of a launch process
5 结论
以某AMT 重型越野车辆为对象,进行了起步过程离合器接合控制的理论分析和试验研究工作。通过对离合器接合过程的建模分析,制定了离合器起步分段控制策略,以离合器分段控制策略为基础,考虑实际应用系统的特点,基于试验数据库,建立了基于离合器接合速度的起过程分段控制模型。进行了平直公路条件的实车起步试验,验证了所提出的基于接合速度的控制策略的正确性,并达到了良好的起步效果。相比其他复杂的离合器接合控制算法,该方法简单,并可直接应用于实车控制中,具有很好的工程应用价值。
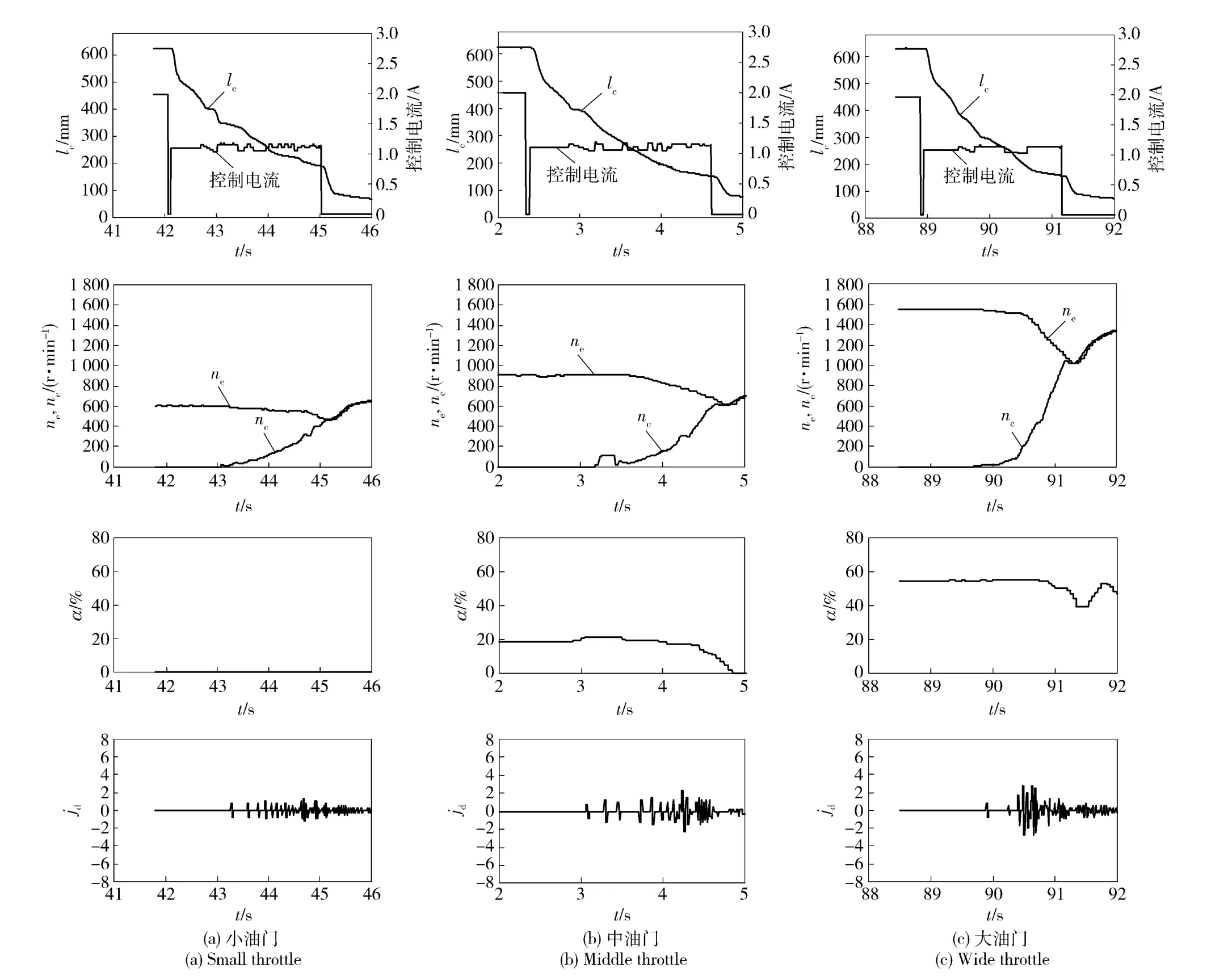
图10 不同起步油门下离合器控制效果Fig.10 Control results under different throttle opening
References)
[1]黄建明,曹长修,苏玉刚. 汽车起步过程的离合器控制[J]. 重庆大学学报:自然科学版,2005,28(3):91 -94.HUANG Jian-ming,CAO Chang-xiu,SU Yu-gang. Clutch control for automotive start-up process[J]. Journal of Chongqing University:Natural Science Edition,2005,28(3):91 -94. (in Chinese)
[2]何忠波,张培林,李国章,等.载重汽车自动离合器坡道起步控制策略与试验研究[J].军械工程学院学报,2004,16(2):32-36.HE Zhong-bo,ZHANG Pei-lin,LI Guo-zhang,et al. The study and experimental of automatic clutch control strategy of hill-start for truck[J]. Journal of Ordnance Engineering College,2004,16(2):32 -36. (in Chinese)
[3]余天明,郑磊,李颂. 电控机械式自动变速器离合器灰色预测PID 控制技术[J]. 农业机械学报,2011,42(8):1 -6.YU Tian-ming,ZHENG Lei,LI Song. Gray prediction PID control technology of automated mechanical transmission clutch[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):1 -6. (in Chinese)
[4]秦大同,陈清洪. 基于最优控制的AMT/DCT 离合器通用起步控制[J]. 机械工程学报,2011,47(12):85 -91.QIN Da-tong,CHEN Qin-hong. Universal clutch starting control of AMT/DCT automatic transmission based on optimal control[J].Journal of Mechanical Engineering,2011,47(12):85 -91. (in Chinese)
[5]Glielmo L,Gutman P O,Iannelli L,et al. Robust smooth engagement of an automotive dry clutch[C]∥Proceedings of 4th IFAC Symposium on Mechatronics System. Heidelberg,Germany:IFAC,2006:632 -637.
[6]Dolcini P. Observer-based optimal control of dry clutch engagement[C]∥Proceedings of the 44th IEEE Conference on Decision and Control. Seville,Spain:IEEE,2005:440 -445.
[7]岳甫营. AMT 重型越野车离合器控制标定技术研究[D]. 北京:北京理工大学,2011.YUE Fu-ying. Study on dry clutch control calibration of heavy-duty off-road vehicle with AMT[D]. Beijing:Beijing Institute of Technology,2011. (in Chinese)
[8]席军强,丁华荣,陈慧岩. 自动机械传动系统起步过程中离合器的自适应控制策略研究[J]. 兵工学报,2004,25(6):657 -661.XI Jun-qiang,DING Hua-rong,CHEN Hui-yan. Self-adaptable control strategy of the clutch in the starting phase for the automated mechanical transmission of vehicles[J]. Acta Armamentarii.2004,25(6):657 -661. (in Chinese)
[9]刘海鸥,陈慧岩,金亚英,等. 基于转速信号的履带车辆主离合器控制策略[J]. 农业机械学报,2005,36(6):8 -11.LIU Hai-ou,CHEN Hui-yan,JIN Ya-ying,et al. Main clutch control strategy based on signal for caterpilar vehicel[J]. Transactions of the Chinese Society of Agricultural Machinery,2005,36(6):8 -11. (in Chinese)
[10]江发潮,陈全世,曹正清. 机械式自动变速器的离合器优化控制[J]. 清华大学学报:自然科学版,2005,45(2):242 -245.JIANG Fa-chao,CHEN Quan-shi,CAO Zheng-qing. Optimal control of automated mechanical transmission clutches[J]. Journal of Tsinghua University:Science and Technology,2005,45(2):242 -245. (in Chinese)
[11]李永军,陈树星,崔勇,等. 机械式自动变速器起车过程综合控制[J]. 汽车工程,2003,25(2):178 -181.LI Yong-jun,CHEN Shu-xing,CUI Yong,et al. The coordinated control of automated mechanical transmission during starting[J]. Automotive Engineering,2003,25(2):178 -181. (in Chinese)
[12]Franco G. Smooth engagement for automotive dry clutch[C]∥Proceedings of the 40th IEEE Conference on Decision and Control. Orlando,Florida,US:IEEE,2001:529 -534.
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
数学小灵通·3-4年级(2020年4期)2020-06-24
小学生学习指导(低年级)(2018年11期)2018-12-03
消费导刊(2018年10期)2018-08-20
中学生数理化·高一版(2018年1期)2018-02-10
汽车维修技师(2017年9期)2017-02-04
山东工业技术(2016年15期)2016-12-01
太空探索(2016年9期)2016-07-12
汽车维修与保养(2015年12期)2015-04-18
