互耦条件下方位全向米波雷达测角算法*
2015-03-09 06:43田超文树梁
现代防御技术 2015年1期
田超,文树梁
(北京无线电测量研究所,北京 100854)
互耦条件下方位全向米波雷达测角算法*
田超,文树梁
(北京无线电测量研究所,北京100854)
摘要:针对方位全向米波雷达的天线阵列口径小,阵元间互耦严重,从而使得传统全向测角方法误差大的问题,提出一种互耦条件下的无模糊全向测角算法。该算法利用相位模式激励出的-1阶,0阶和1阶模进行联合测角,相比于仅利用-1阶和0阶模或者0阶和1阶模,消除了互耦对测角的影响;相比于仅利用-1阶和1阶模,可实现无模糊测角。理论推导、仿真分析以及实测结果均验证了该算法的有效性。
关键词:米波雷达;方位全向;互耦;无模糊测角
0引言
近年来,米波雷达因其在反隐身和抗反辐射导弹等方面的频段优势而重新受到重视[1-3]。法国的综合脉冲孔径雷达试验系统,德国的Melissa新型米波雷达以及国内自主研发的综合脉冲孔径雷达[4-6]作为新体制米波雷达的代表在发挥米波雷达频段优势的同时均可实现全向探测。不过考虑到规模与成本,这类雷达的机动性与量产列装受到一定限制。相较而言,俄罗斯的“猫头鹰”,“土拨鼠”和KB雷达等低频全向探测雷达的研制生产成本相对较低,雷达规模较小,机动性较高。本文即针对此类全向探测雷达的测角方法进行分析并改进。
文献[7-9]对四阵元时相位全向测角原理进行讨论且指出四阵元时该测角方法存在固有误差,但未就影响该误差的因素进行深入分析。文献[10]给出四阵元全向测角固有误差的数值仿真结果,但没有给出固有误差与阵元数以及阵列直径等阵列参数的解析关系。文献[11]仿真分析了阵列直径与固有误差的关系,且指出了四阵元时互耦对测角的影响,但并未提出解决互耦引起测角误差的方法。文献[12]提出利用-1阶和1阶模消除互耦对全向测角的影响,但回避了此时存在的180°测角模糊。
本文以N阵元均匀圆阵为基础,首先简要阐述相位全向测角的基本原理并推导得到固有误差和噪声引起的测角误差与阵元数和阵列直径等阵列参数的解析关系;后针对阵元间存在严重互耦从而引起测角误差的问题,提出利用圆阵相位模式中-1阶,0阶和1阶模联合测角的方法,既可消除互耦的影响亦能实现无模糊测角;最后,利用数值仿真说明阵元数和阵列直径的选择依据,结合实际数据说明所提算法的可行性。
1方位全向测角原理及误差分析
天线阵元为半波阵子,均匀分布在圆周上,八阵元的圆阵天线如图1所示。不失一般性,本文取阵元数为N,相邻阵元间的夹角为2π/N。假设阵列半径为r,目标相对相位中心的方位角与仰角分别为θA和θE,则目标到相位中心与第k个阵元的距离差约为rcosθEcos(θA-2πk/N),若发射信号满足窄带假设,则第k个天线阵元接收的信号可表示为

(1)
式中:k=1,2,…,N;λ为波长;s0(t)为相位中心接收的信号。

图1 八阵元圆阵示意图Fig.1 Schematic map of circular array with 8 elements
对接收的N路信号进行离散傅里叶变换则有

(2)
式中:l=0,1,…,N-1。

Q为整数,则可由式(2)得到
exp[-j(l+QN)θA].
(3)


(4)
一般的方位全向测角仅利用F-1或者F1,即直接取其相位,而考虑到实际中s0(t)的相位未知,因此为消除s0(t)的相位引起的测角偏差,可利用F-1和F0或者F1和F0获得目标角度信息。

(5)

(6)
雷达采用上述全向测角方法,由于经过圆阵的模式转换之后只利用了N阶模式中的两阶,浪费了可利用的其他阶模式数据,丧失了多目标的角度分辨能力,因此需要通过波形设计等措施尽量提高其速度和距离分辨能力。不过,由于收发方向图具有全向性,因此不存在运动目标的跨波束问题,从而有利于进行长时间积累以提高对运动目标的检测能力。
考虑到由式(3)到式(4)的近似会引入固有误差,且当2πr/λ>N-1时,利用F-1和F0或者F1和F0进行测角的固有误差不能忽略。下面推导利用F-1和F0测角时的固有误差,利用F1和F0测角的固有误差的推导过程可类比。

(7)
不妨记U1(α)=JN-1(α)+J1+N(α),U2(α)=2J1(α)JN(α)/J0(α)-JN-1(α)+J1+N(α),U3(α)=2J1(α)JN(α)/J0(α)+JN-1(α)-J1+N(α).
若2πr/λ<2N-1,J0(α)J1(α)≠0。
当N=4k,k为整数时,结合式(3)和式(7)可得

(8)
当N=4k+2,k为整数时,结合式(3)和式(7)可得

(9)


(10)
当N=4k+1,k为整数时,结合式(3)和式(7)可得

(11)
当N=4k+3,k为整数时,结合式(3)和式(7)可得

(12)


(13)
通过合理选择阵列参数可以使得固有误差被忽略,仿真部分会予以说明。
假设每路接收通道引入的噪声均为均值为0,方差为σ2的复高斯白噪声,第k路的噪声记为nk,则有

(14)



(15)
进而可以求得误差的均方根

(16)

2互耦条件下的无模糊测角方法
为减小因方位全向造成的天线增益损失的影响,在阵列参数的选取时需要使|F-1|,|F1|和|F0|的取值,即|J1(α)|和|J0(α)|尽量大,从而要求阵列的半径与波长的比值较小,此时各阵元之间的互耦严重,若依然仅采用式(5)或式(6)测角,误差可能非常大。为了解决该问题,可以联合F-1,F0,F1进行测角。
由于阵元均匀分布在圆周上,因此阵列的互耦矩阵Z为对称Toeplitz矩阵,当阵元数为偶数时,互耦矩阵Z可表示为

(17)
此时第k个阵元接收到的信号sck(t)为

(18)
将式(18)代入式(2)可得

(19)
从互耦矩阵的结构不难看出,若以互耦矩阵的第1列为参考,其余N-1列可以依次通过一次循环移位得到,而结合离散傅里叶变换的移位特性可以得到

(20)
因此

(21)
同理可得

(22)
根据互耦矩阵第1列的取值可得

(23)

(24)
因此

(25)



(26)

(27)
根据式(26)和式(27)可以分别求得θ1=θA-θC和θ2=θA+θC,若θC∈[-π/2,π/2],则θA=(θ1+θ2)/2即为目标真实角度,否则会存在180°的模糊,具体如图2所示。

图2 测角模糊示意图Fig.2 Schematic map of ambiguous angle measurement
由图2可知,若θC∈[-π/2,π/2],利用∠H1Ox和∠L1Ox即可得到目标的真实角度∠T1Ox,若互耦引入的角度误差过大,此时利用式(26)和(27)得到的角度分别为∠L2Ox和∠H2Ox,进而求得目标的角度为∠T2Ox,与目标真实角度恰好相差π。
工程实际中,相比于消除互耦或者得到具体的互耦矩阵,θC∈[-π/2,π/2]的条件相对容易满足,因此联合F-1,F0,F1进行测角以消除互耦的影响具有一定的可行性。
3仿真及试验结果分析
天线增益的损失随着|J0(α)|,|J1(α)|增大而减小,而由式(16)知U4(α)越小,噪声引起的测角误差越小。不难看出,对|J0(α)|,|J1(α)|尽量大,U4(α)尽量小的要求是一致的,因此将U4(α)的取值作为半径波长比的选择依据。

图3 U4(α)随半径波长比变化曲线Fig.3 Curves of U4(α) varied with the ratio of radius to wavelength
如图3所示,r/λ=0.2时,U4(α)取得最小值,因此,0.2即为半径波长比的最优选择。
若取半径波长比为0.2,仰角为0°,则采用0阶和1阶模测角的固有误差随阵元数和方位角的变化规律如图4所示。

图4 固有误差随方位角和阵元数变化曲线Fig.4 Curves of system error varied with azimuth angle and amount of elements
由图4可知,当阵元数N≥6,测角的固有误差基本可以忽略。而由式(16)知,阵元数越多,噪声引起的测角误差越小,不过考虑到阵列口径较小,阵元数越多互耦越严重,因此阵元数取6或8为宜。
根据上述分析,即便阵列的半径取为0.2λ,阵元数为4,阵元间的最近距离为0.28λ,最远距离为0.4λ,均小于半波长,此时阵元间的互耦不可忽略。而前面的理论分析表明,若互耦引起的测角误差不超过π/2,本文所提测角算法可有效消除互耦的影响且实现无模糊测角。
为说明互耦引起的测角误差不超过π/2这一前提假设在工程实际中可以得到满足,进行了实验验证,采用某米波雷达天线布置为圆阵,进行了方位测角试验。为了简化试验,并未采用6单元系统,而是采用4单元系统,测角试验条件为:垂直极化天线,4路接收通道,采用实时录取数据,事后处理的方式,发射信号采用连续波,频率148 MHz ,阵列半径为0.25倍波长,发射天线固定,接收天线围绕阵列中心顺时针转动2圈,为减小起伏误差的影响,试验中信噪比高于30 dB。
采用0和1阶测角,0和-1阶测角以及-1,0和1阶联合测角的结果如图5所示,其中每一时间帧为0.5 s。可以看到,采用0和1阶测角以及0和-1阶测角相对于-1,0和1阶联合测角均有较大偏离,为互耦引起的测角误差。该误差更为直观地示于图6中。
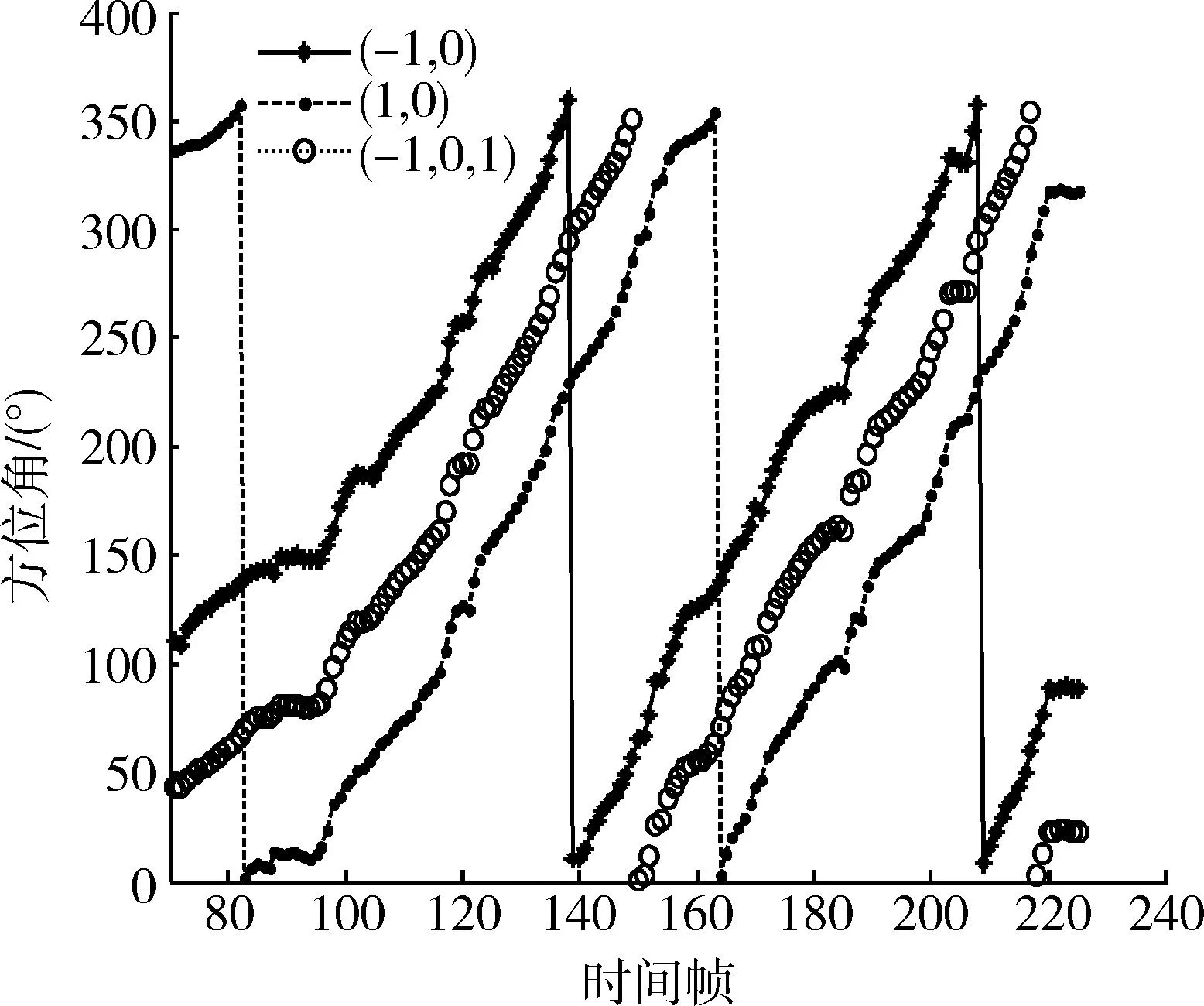
图5 3种测角算法结果对比Fig.5 Comparison of 3 algorithms

图6 互耦引起的测角误差曲线Fig.6 Curves of angle error entailed by mutual coupling
从图6可以看出,采用0和1阶测角或0和-1阶测角,互耦引起的测角误差约为65°,小于90°,这说明本文所提互耦条件下无模糊测角方法适用的前提假设在工程实际中可以得到满足,因此该方法具有可行性。
4结束语
为保证米波全向雷达的全向性和减小天线增益损失,天线阵列口径一般较小,此时阵元间的互耦会引起较大测角误差。针对此问题,本文提出在利用相位模式中的0阶和1阶模或-1阶和0阶模测角的传统方法的基础上利用-1阶,0阶和1阶模联合测角的方法。该方法可消除互耦对测角的影响且在互耦引起的测角误差不超过π/2时可实现无模糊测角,实验数据证明了该方法的工程可行性。
参考文献:
[1]陈长兴, 巩林玉, 班斐. 米波谐振雷达反隐身技术研究[J]. 舰船电子对抗, 2009, 32(4): 34-37.
CHEN Chang-xing, GONG Lin-yu, BAN Fei. Research into Anti-stealth Technology of Meter-Wave Resonance Radar[J]. Shipboard Electronic Countermeasure, 2009, 32(4): 34-37.
[2]沈齐, 潘健, 高梅国. 米波圆接收阵雷达[J]. 现代雷达, 2005, 27(11): 16-23.
SHEN Qi, PAN Jian, GAO Mei-guo. VHF Radar Using Circular Receiving Array[J]. Modern Radar, 2005, 27(11): 16-23.
[3]李金梁, 李永桢, 王雪松. 米波极化雷达的反隐身研究[J]. 雷达科学与技术, 2005, 3(2): 321-326.
LI Jin-liang, LI Yong-zhen, WANG Xue-song. Study on Anti-Stealth with Meter-Band Polarimetric Radar[J]. Radar Science and Technology, 2005, 3(2): 321-326.
[4]张庆文, 保铮, 张玉洪. 综合脉冲和天线雷达时空的三维匹配滤波及性能分析[J]. 电子科学学刊, 1994, 16(5): 481-489.
ZHANG Qing-wen, BAO Zheng, ZHANG Yu-hong. 3-D Matching Filter and Performance Analysis of Synthetic Impulse and Antenna Radar[J]. Journal of Electronics, 1994, 16(5): 481-489.
[5]保铮, 张庆文. 一种新型的米波雷达—综合脉冲与孔径雷达[J]. 现代雷达, 1995, 17(1): 1-13.
BAO Zheng, ZHANG Qing-wen. A New VHF Radar-Synthetic Impulse and Aperture Radar[J]. Modern Radar, 1995, 17(1): 1-13.
[6]张庆文. 综合脉冲与孔径雷达系统性能分析与研究[D]. 西安: 西安电子科技大学, 1994.
ZHANG Qing-wen. System Performance Analysis and Research of Synthetic Impulse and Aperture Radar[D]. Xi’an: XiDian University, 1994.
[8]BAGHDADY E J. New Developments in Direction of Arrival Measurement Based on Adcock Antenna Clusters[C]∥ Proc. of Aerospace and Electronics Conference, 1989: 1873-1879.
[9]WANG J, WANG H T, ZHAO Y. Direction Finding in Frequency-Modulated-Based Passive Bistatic Radar with a Four Element Adcock Antenna Array [J]. IET Radar Sonar Navigation, 2011, 5(8): 807-813.
[10]HAMERLE R. Factors Limiting the Accuracy of Doppler and Adcock Direction Finding Systems[C]∥ Proc. of IEE Colloquium on Passive Direction Finding, 1989: 311-313.
[11]HENAULT S, ANTAR Y M M, RAJAN S, et al. Impact of Mutual Coupling on Wideband Adcock Direction Finders[C] ∥ Proc. of IEEE Canadian Conference on Electrical and Computer Engineering, 2008: 1327-1331.
[12]WILLIAM R. An Evaluation of the Watson Watt and Butler Matrix Approaches for Direction Finding[R]. Canada: Defense Research Establishment Ottawa, 1999.
Angle-Measuring Algorithm with Mutual Coupling of Azimuth-Omni-Directional VHF Radar
TIAN Chao,WEN Shu-liang
(Beijing Institute of Radio Measurement, Beijing 100854, China)
Abstract:The array aperture of azimuth-omni-directional VHF radar is usually small, so the mutual coupling between antennas may be so intensive as to cause extra measuring error for conventional omni-directional angle measurement algorithm. To resolve this problem, an improved algorithm without ambiguity is proposed. The algorithm utilizes mode -1, mode 0 and mode 1 excited by phase mode to measure azimuth angle. In comparison with the algorithm only using mode -1 and mode 0, the proposed algorithm can eliminate the influence of mutual coupling to angle measurement. By comparing with the algorithm only using mode -1 and mode 1, the proposed algorithm can get the unambiguous value of angle to be measured .Theoretical analyses, simulation results and measured data all demonstrate the effectiveness of the proposed algorithm.
Key words:very high frequency(VHF) radar; azimuth omni-directional; mutual coupling; unambiguous angle measurement
中图分类号:TN953+.5
文献标志码:A
文章编号:1009-086X(2015)-01-0094-06
doi:10.3969/j.issn.1009-086x.2015.01.016
通信地址:100854北京市142信箱203分箱E-mail:qctchao87@126.com
作者简介:田超(1987-),男,湖北蕲春人。博士生,主要研究方向为雷达总体技术。
基金项目:有
收稿日期:2013-12-24;
修回日期:2014-04-14