复杂机械系统时变不确定性设计方法
2015-03-14 03:21石博强段国晨申焱华余国卿
西安交通大学学报 2015年3期
石博强,段国晨,申焱华,余国卿
(北京科技大学机械工程学院,100083,北京)
复杂机械系统时变不确定性设计方法
石博强,段国晨,申焱华,余国卿
(北京科技大学机械工程学院,100083,北京)
考虑机械系统参数随时间的演化,基于连续时间模型和伊藤引理,推导建立了多参数复杂机械系统时变不确定性计算模型,将系统整体时变不确定性由其漂移函数和波动函数表达,系统漂移函数和波动函数则由底层时变参数的漂移率和波动率决定,从而解析了机械系统时变不确定性设计的原理。与传统方法相比,该多参数复杂机械系统时变不确定性设计方法既可以针对各零件(或子系统)进行时变不确定性设计,也可以建立统一的系统状态方程,针对复杂机械系统进行不确定性设计,并且算得的系统可靠度是动态的,可以预测未来任意时刻的可靠度,从而为系统的未来发展趋势提供先期预警,为设备维护提供指导。通过具体算例,说明了该设计方法的应用。该设计方法具有普适性,可以推广应用于城市公交系统、城市给排水系统、燃气系统、核电系统等的时变不确定性设计和可靠性分析。
时变不确定性设计;机械系统;可靠度
多参数复杂机械系统的可靠性问题一直备受关注。目前,传统的可靠性设计仍以概率论与数理统计为基础,其思路是将机械系统的设计参数视为随机变量,对各参数计算分布概率。在这种可靠性设计中,对任一设计参数一般是将时间的效应一统归于一个随机变量,即将设计参数沿着时间坐标轴的随机演化压缩成不随时间演化的随机变量。这样处理较好地保持了数学的严密性,但同时也要面对确定所谓的“联合概率密度”的难题。
机械系统在其工作期间的演化过程非常复杂,时间在设计参数的不确定性(随机性)中发挥着重要作用。从机械系统演化角度出发,设计参数是一个沿时间坐标轴的随机过程。如何对这个不确定性过程进行表达、模型化并解析出设计变量参数呢?另外,机械系统演化的随机性,导致了机械系统特别是复杂机械系统未来的不确定性,那么人们会问:我们所设计的机械系统会按照预先路径走完它的生命历程吗?它的不确定性如何?或者它在将来任意时刻的可靠性如何?这些成为复杂机械系统从设计角度需要解答的问题。
机械系统是指具有特定功能、由相互具有联系的2个或2个以上的要素组成的整体。一个大的系统可以由若干个小系统组成,这些小系统常称作子系统,子系统可包含更小的子系统。机械零件是机械系统中最小的子系统。机械系统的不确定性取决于各子系统的不确定性,子系统的不确定性又与各零件的不确定性密切相关。复杂机械系统多是混联系统,子系统(零件)既有串联也有并联。系统不确定性可归结为各个子系统和零件的不确定性以及它们的构成关系,因此机械系统的不确定性设计就转化为各零件的不确定性设计。
本文考虑了时间效应对系统不确定性的影响,使时间坐标下的不确定性效应不再被人为“压缩”。文中提出的时变不确定性设计方法可以针对各零件(或子系统)进行时变不确定性设计,或者建立统一的系统状态方程,针对系统设计参数进行不确定性设计。
本文提出的时变不确定性设计方法涉及到随机集理论、定量风险分析和鲁棒性分析等多种理论[1-3]。国内外的学者已在许多领域对时变不确定因素的影响进行了大量研究:方永锋等人基于应力-强度干涉理论和随机过程理论,建立了结构强度退化条件下的结构动态可靠性预测模型,获得了随时间变化的结构可靠度[4];王泽群等人通过建立时间响应曲面,将时变可靠性分析转化为时间无关的可靠性分析,然后使用传统的可靠性分析方法来解决问题[5];Andrieu-Renaud等人基于异型杂交,使用传统的可靠性分析方法来解决时变可靠性分析的问题[6];Grigorin等人基于变量极值理论,求解了随机环境下动态系统的可靠性[7];Jiang等人借助凸面模型建立了变量特征函数,利用非概率分析方法解决结构时变不确定性问题[8]。本文以作者先前的研究成果[9-10]为基础,建立了多参数机械系统的时变不确定性设计方法,并给出了设计算例。与作者先前的方法相比,本文提出的设计方法不再局限于对单个零件的设计分析,而是对整个机械系统进行设计分析。
1 数学模型
设G为系统特征函数,是x(t)和t的可微函数,其中x(t)是一个伊藤过程,它满足
dx(t)=μ(x(t),t)dt+σ(x(t),t)dwt
(1)
式中:μ和σ分别是随机过程xt的漂移函数和波动函数;wt表示一个维纳过程。维纳过程是一个特殊的伊藤过程,满足式(1)中取μ(x(t),t)=0、σ(x(t),t)=1的情形。
对于随机变量x(t),常假定其服从一个特殊的伊藤过程
dx(t)=λx(t)dt+δx(t)dwt
(2)
式中:λ为漂移率,δ为波动率,它们均为定值。漂移函数为μ(x(t),t)=λx(t),波动函数为σ(x(t),t)=δx(t),则根据伊藤引理[11]有
(3)
但是在工程实际中,一个系统常需要考虑多个随机过程的影响,因此需要对伊藤引理进行推广。
系统特征函数为G(x(t),y(t),t),x(t)、y(t)均为伊藤过程。对系统特征函数进行泰勒展开,变为
(4)
伊藤过程xt、yt的离散形式为
(5)
根据式(5)可得
(6)
式(5)两式的第一项满足
E(σ2ε2Δt)=σ2Δt; var(σ2ε2Δt)=2σ4(Δt)2

dG=μGdt+σGdwt
(7)
式中
μG、σG是μG(x(t),y(t),t)和σG(x(t),y(t),t)省略了变元的形式。推广至拥有n个伊藤过程的多参数系统G(x1,x2,…,xn,t),仍然可推得式(7),所不同的是
对方程(7)积分可得
(8)
式中:G(0)表示系统在零时刻的初始值;右面最后一项是一个随机积分。
2 设计方法
在机械系统设计中,常常引入许用值的概念,通过建立系统特征参数实际值与许用值的干涉模型来求解机械系统可靠度。本文所提出的系统时变不确定性设计方法在建立干涉模型时考虑了时间演变的影响,求解的是系统的动态可靠度。工程实际经验表明,系统参数多服从对数正态分布。
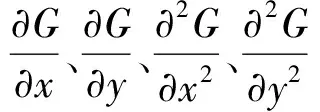
以强度 [S]-应力S干涉模型为例,考虑时变因素的动态干涉模型如图1所示。在t=0时刻,系统的可靠度
R(0)=P(G[S](0)>GS(0))=
P(lnG[S](0)-lnGS(0)>0)
在t=T时刻,系统的可靠度
R(T)=P(G[S](T)>GS(T))=
P(lnG[S](T)-lnGS(T)>0)
对上述公式进行推导可得
(9)
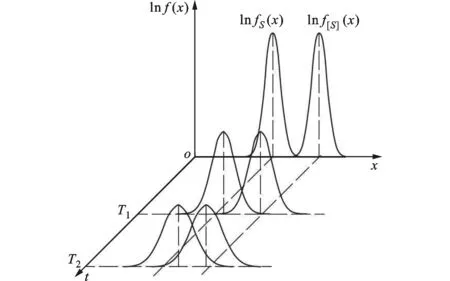
图1 动态干涉模型
3 漂移率与波动率估计
对于复杂机械系统的时变不确定性设计,时变可靠度的计算需要根据历史观测数据获得其子系统的随机过程xt的漂移率λ和波动率δ2,然后通过式(7)计算得到总系统的漂移函数μG和波动函数σG。
根据伊藤引理有
(10)

(11)

(12)
4 设计算例
采用螺栓组联结时,由于各螺栓的空间位置不同,所以各螺栓的工作条件也有所不同,这就造成了各个螺栓在所联结的机械系统中的工作状况的复杂性,其应力随之表现为随时间演化的复杂性变化。如图2所示,对称布置的紧螺栓组联结的初始条件为:所受倾覆力矩M=40 kN·m,各螺栓到回转中心轴线的距离r=125 mm,预紧力Fp=160 kN,螺栓屈服强度 [S]=575 MPa。1、4号螺栓与2、3号螺栓的高度不同;1、4号螺栓暴露在空气中,2、3号螺栓浸在液体中,各螺栓的工作条件不同。各螺栓的倾覆力矩、回转半径、螺栓直径、预紧力和屈服强度均服从不同参数的伊藤过程。按10 a(年)后螺栓的可靠度R(10 a)=95%设计螺栓。
图2 螺栓组布置示意图
根据力矩平衡及变形协调条件,可得各螺栓所受工作载荷
4个螺栓的回转半径相同,所以有
(13)

(14)
式中:c1、c2分别为螺栓和被连接件的刚度。
设计时引入扭矩影响系数,取1.3,则螺栓拉应力
(15)
由式(7)可得
由式(13)得
所以
(16)
相对刚度和各螺栓到翻转轴线的距离的变化对各螺栓所受载荷影响极小,故可忽略,这里取相对刚度c1/(c1+c2)=0.25。观测值的时间间隔Δ=10 d。倾覆力矩及强度的历史观测数据如图3所示。

(a)倾覆力矩

(b)强度图3 倾覆力矩及强度的历史观测数据
对倾覆力矩和强度进行历史数据仿真,可得
根据R(10 a)=95%,可求得d1≥22.594 mm。初选M30螺栓,其螺纹小径d1=27.727 mm。
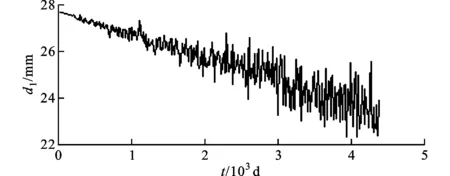
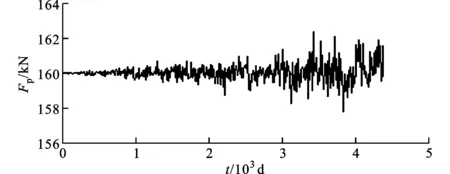
1号螺栓螺纹小径d1和预紧力Fp的历史观测数据如图4所示。
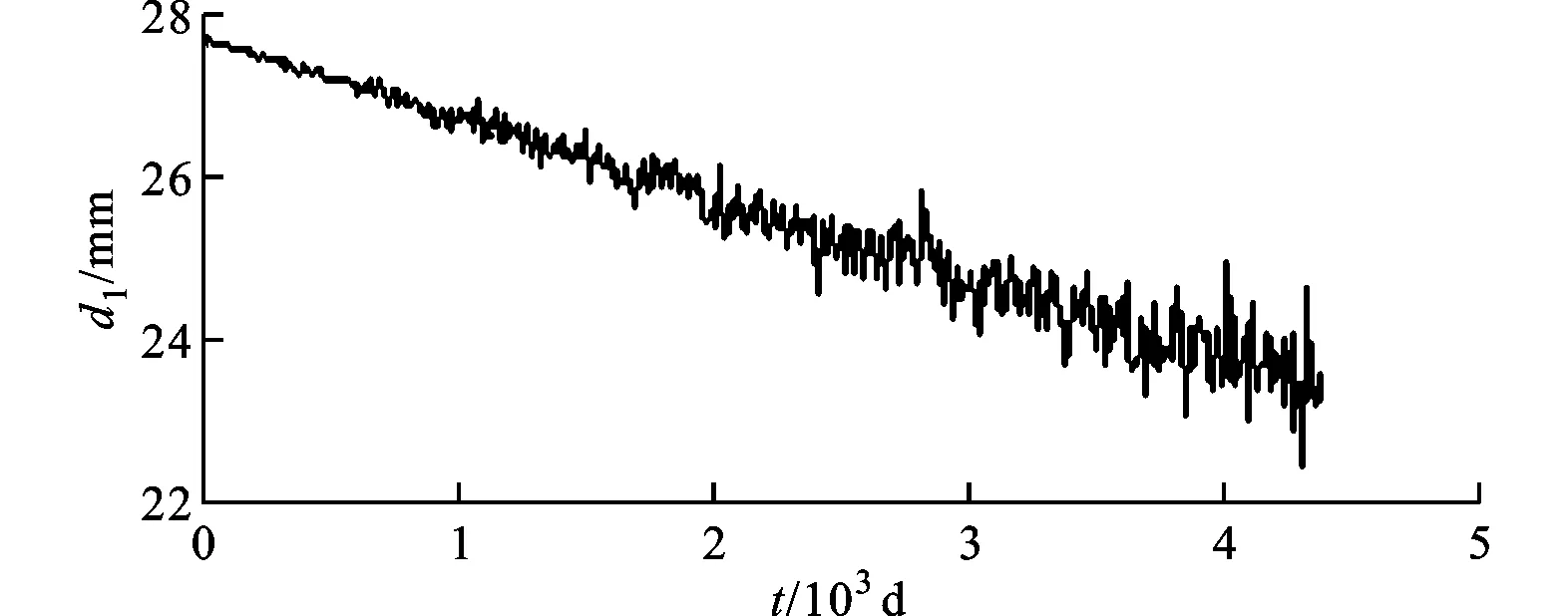
(a)螺纹小径
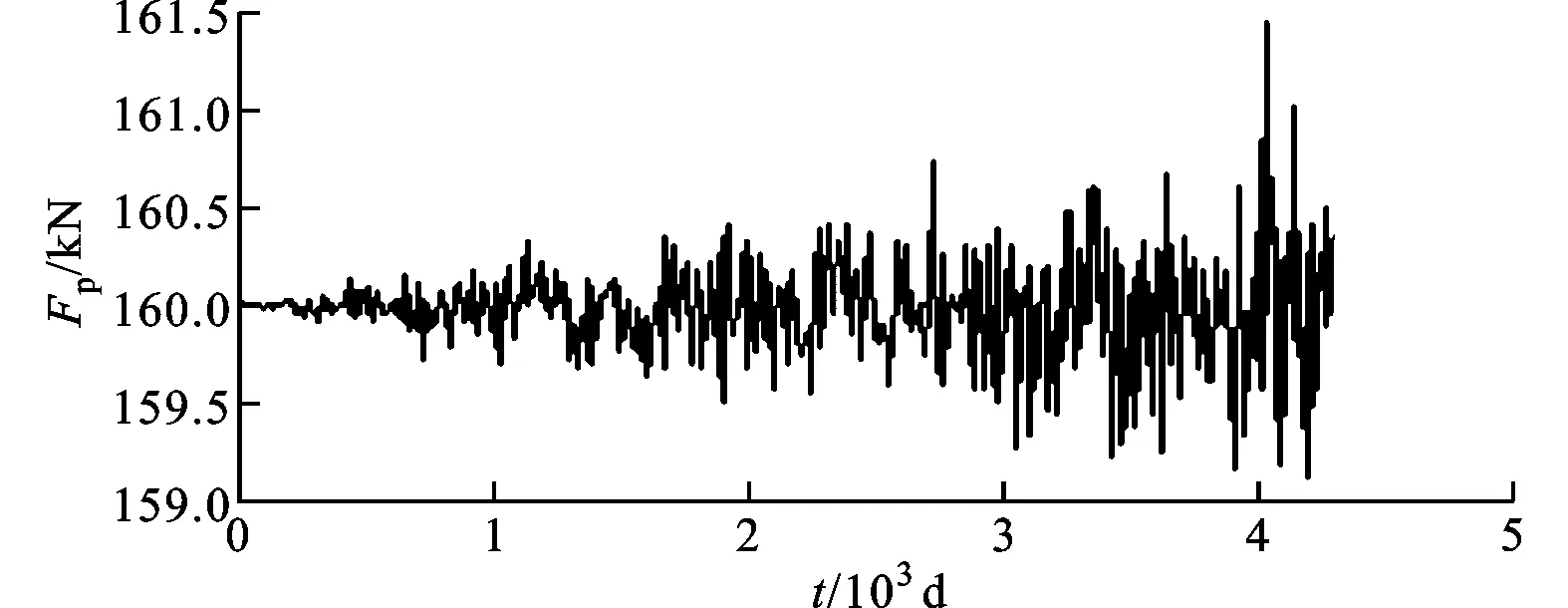
(b)预紧力图4 1号螺栓螺纹小径和预紧力的历史观测数据
对螺纹小径和预紧力进行历史观测数据仿真,可得
μM=λMF(t);σM=δMF(t)
μFp=λFpFp(t);σFp=δFpFp(t)
μd1=λd1d1(t);σd1=δd1d1(t)
将其代入式(9),10、11、12 a后的可靠度计算中取T=3 650 d, 4 015 d, 4 380 d,得
R(3 650 d)=Φ(3.37)=0.999 6
R(4 015 d)=Φ(2.61)=0.988 1
R(4 380 d)=Φ(0.62)=0.732 4
2号螺栓d1和Fp的历史观测数据如图5所示。
(a)螺纹小径
(b)预紧力图5 2号螺栓螺纹小径和预紧力的历史观测数据
对d1和Fp进行历史观测数据仿真,可得
将其代入式(9),10、11、12 a后的可靠度计算中取T=3 650 d, 4 015 d, 4 380 d,得
R(3 650 d)=Φ(1.77)=0.961 6
R(4 015 d)=Φ(1.20)=0.884 9
R(4 380 d)=Φ(0.54)=0.705 4
5 结 语
本文基于机械系统随时间演化的不确定性思想,利用随机积分中的伊藤引理,推导建立了多参数系统时变不确定性计算模型,提出了考虑时间效应的机械系统时变不确定性设计方法。该方法将系统整体时变不确定性由系统的漂移函数和波动函数表达,而系统漂移函数和波动函数则由底层多个时变参数的漂移率和波动率表达,从而解析了复杂机械系统时变不确定性设计的原理。另外,通过该方法计算的可靠度是动态的,在设计阶段就能“预先”已知系统任一时刻的可靠性,
从而可为系统的未来发展趋势提供先期预警,对设备维护提供指导。文中给出了算例,说明了该方法的应用。同时,本文的方法对于其他系统设计具有普适性,可以推广应用于城市公交系统、城市给排水系统、燃气系统、核电系统等其他领域的时变不确定性设计和可靠性分析中。
[1] TONON F, BERNARDINI A, MAMMINO A. Deter-mination of parameters range in rock engineering by means of Random Set Theory [J]. Reliability Engineering and System Safety, 2000, 70(3): 241-261.
[2] JENSEN H A, KUSANOVIC D S. Reliability-based optimization of stochastic systems using line search [J]. Computer Methods in Applied Mechanics and Engineering, 2009, 198: 3915-3924.
[3] ADDURI P R, PENMETSA R C. Confidence bounds on component reliability in the presence of mixed uncertain variables [J]. International Journal of Mechanical Sciences, 2008, 50(3): 481-489.
[4] 方永锋. 结构与系统的动态可靠性研究 [D]. 西安: 西安电子科技大学, 2013.
[5] WANG Zequn, WANG Pingfeng. A new approach for reliability analysis with time-variant performance characteristics [J]. Reliability Engineering and System Safety, 2013, 115: 70-81.
[6] ANDRIEN-RENAUD C, SUDRET B, LEMAIRE M. The PHI2 method: a way to compute time-variant reliability [J]. Reliability Engineering and System Safety, 2004, 84(1): 75-86.
[7] GRIGORIN M, SAMORODNITSKY G. Reliability of dynamic systems in random environment by extreme value theory [J]. Probabilistic Engineering Mechanics, 2014, 38: 54-59.
[8] JIANG C, NI B Y, HAN X, et al. Non-probabilistic convex model process: a new method of time-variant uncertainty analysis and its application to structural dynamic reliability problems [J]. Computer Method in Applied Mechanics and Engineering, 2014, 268: 656-676.
[9] 石博强, 闫永业, 范慧芳, 等. 时变不确定性机械设计方法 [J]. 北京科技大学学报, 2008, 30(9): 1050-1054. SHI Boqiang, YAN Yongye, FAN Huifang, et al. Mechanical design method with uncertain evolution [J]. Journal of University of Science and Technology Beijing, 2008, 30(9): 1050-1054.
[10]闫永业, 石博强. 考虑不确定性因素的时变可靠度计算方法 [J]. 西安交通大学学报, 2007, 41(11): 1303-1306. YAN Yongye, SHI Boqiang. Time dependent reliability analysis under uncertainty [J]. Journal of Xi’an Jiaotong University, 2007, 41(11): 1303-1306.
[11]LO A W. Maximum likelihood estimation of generalized Ito’s processes with discretely sampled data [J]. Econometric Theory, 1988, 4(2): 231-247.
(编辑 葛赵青)
Evolution-Based Uncertainty Design for Complex Mechanical Systems
SHI Boqiang,DUAN Guochen,SHEN Yanhua,YU Guoqing
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Considering the evolution of mechanical system parameters, and based on the continuous-time model and Ito Lemma, a time-varying reliability calculation model of multi-parameter complex mechanical system is established. In this model the systems’ time-varying uncertainty can be expressed by drift functions and volatility functions, which are dependent on the drift rate and volatility rate known from basic design parameters. Thus the principle of evolution-based uncertainty design (EBUD) for complex mechanical systems is expounded. Compared with the traditional methods, this method can be applied to either the evolution-based uncertainty design of the elements (or subsystems), or the uncertainty design for complex mechanical systems by establishing uniform system state equations. By this means, the dynamic system reliability can be obtained, and the reliability at any time in the future can be calculated. Thereby the time-varying reliability calculation model can forecast the system’s future development trend and offer early warnings, giving proper advice for the equipment maintenance. Taking the design of bolt group as an example and with the model applied, the time-varying reliabilities of screws in different positions are calculated and compared. In this example, the basic time-varying parameters include the turning torqueM, the pre-loadFp, the minor diameterd1and the yield strength [S] of the screws. This method can also be used in other fields, such as evolution-based uncertainty design and reliability analysis of urban traffic control system, urban water-supply and drainage system, urban gas supply system, and so on.
evolution-based uncertainty design (EBUD); mechanical system; reliability
2014-08-11。 作者简介:石博强(1962—),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(51075029)。
时间: 2014-12-24
网络出版地址: http:∥www.cnki.net/kcms/detail/61.1069.T.20141224.1607.004.html
10.7652/xjtuxb201503014
TH122
A
0253-987X(2015)03-0080-05
猜你喜欢
法律方法(2022年2期)2022-10-20
自动化学报(2019年12期)2020-01-19
英语文摘(2019年6期)2019-09-18
中国外汇(2019年7期)2019-07-13
玩具世界(2019年6期)2019-05-21
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
现代商贸工业(2016年17期)2017-02-15
浙江大学学报(工学版)(2016年2期)2016-06-05
科技资讯(2015年7期)2015-07-02