电力机车粘着控制及其仿真研究
2015-03-18 10:47张伟娟杨岳毅
郑州铁路职业技术学院学报 2015年4期
张伟娟,杨岳毅
(1.郑州铁路装备制造有限公司,河南 郑州 450000;2.郑州铁路职业技术学院,河南 郑州 450052)
为了实现铁路重载化和高速化的目标,需要机车具有能够满足实际需求的牵引力和制动力,这对机车粘着利用率提出了更高的要求。为更有效地利用轮轨间的粘着作用力,防止机车空转,传统机车上安装了防滑器和撒沙器等,但是效果一般。目前,国内外先进的大功率机车上都使用了粘着控制系统,其中普通采用的有组合校正法、最优蠕滑速度空转法以及扰动观测器法等等,对于粘着控制系统的研究已经成为了热点[1-3]。由于我国机车上的粘着控制系统大多依靠国外技术,没有自主知识产权的粘着控制系统,因此加大粘着控制系统的研究对于促进我国铁路发展具有重要意义。传统的粘着控制方法的理论主要通过简化的牵引力系统模型,与现实系统差别较大,同时空转发生时间短暂,现场实车粘着实验需要花费大量人力物力,直接造成研发周期长,阻碍了对粘着控制的进一步研究。采用基于多学科虚拟样机仿真技术,搭建粘着控制联合仿真平台,使仿真环境更加贴合生产实际,为控制算法在粘着系统中的应用提供了仿真环境[4-6]。
1 粘着的基本理论
钢轨接触面与机车动轮之间产生的相对静止的物理现象被称作轮轨的粘着,我们把钢轨与机车动轮之间的切向力称为粘着力,粘着作用力既可以充当机车牵引力也可以充当机车制动力。当轮轨之间发生蠕滑时,机车速度是低于轮对的轮周线速度,所以我们能够把蠕滑速度定义成

其中,ωd表示转动角速度,r 表示动轮的轮径,νt表示机车实际运行速度。
为了研究机车动轮与钢轨之间的粘着状态,我们需要定义一个粘着系数,通过粘着系数的大小来判断轮轨粘着状态。因此,我们将轮轨间切向力F与车轮的垂直载荷P 的比值定义为轮轨间的粘着系数,其公式为

由于粘着系数受到轮轨材质、环境等多方面因素的影响,无法准确计算。为了研究机车粘着特性,科研人员根据机车大量实际运行数据以及相关实验得到了粘着-蠕滑率特性曲线,通过该曲线来表述粘着特性(见图1)。
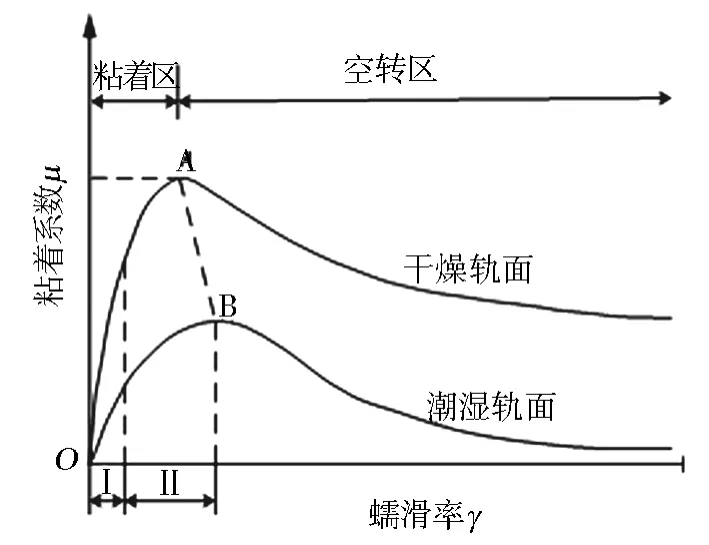
图1 粘着特性曲线
2 基于ADAMS/Rail 的多学科虚拟样机
传统研究粘着控制系统的方法与实际存在较大差距,同时需要在实车上进行大量实验来验证算法的正确性,而现场无法提供大量时间用于实验,同时空转发生条件不易模仿且时间短暂,实验难度大,这都造成了研发周期长,费用高等情况。为了改进研究方法,进一步优化粘着控制算法,需要在多种特殊工况对机车的整体、轮轨接触系统和牵引传动及控制系统进行建模和仿真。采用机械多体动力学软件AMAMS/Rail 可以很好地按照实际参数搭建机车整体,仿真机车轮轨之间的相互作用。然而,AMAMS/Rail 软件的控制算法模块功能有限,因此配合采用MATLAB/Simulink 软件进行控制算法的仿真,从而建立虚拟样机仿真系统,可以大大提高研发效率,降低成本[7-8]。
2.1 机车动力学模型
在AMAMS/Rail 软件中依据机车总体各部分实际参数搭建机车机械仿真模型,模拟真实机车在各种工况和环境下的运行情况。由于机车整体结构的复杂性,在贴近实际和不影响仿真结果正确性的前提下,对机车整体进行必要的简化和假设处理。
(1)在每个动轮对上直接添加牵引电机输出转矩,对于牵引电机和齿轮变速装置不进行机械建模;车体的挂钩上的受力简化成空气阻力和列车加速时的牵引力。
(2)忽略各运动副内的摩擦损耗,采用线性的弹簧橡胶衬套作为刚体间的连接。
(3)机车车体以及所有转向架都是结构对称,而且各部分呈对称分布。
(4)在机车仿真运行过程中,忽略钢轨的弹性形变。
2.2 仿真平台的整体结构
利用ADAMS/Rail 软件组建电力机车的多体动力学系统,采用Matlab/Simulink 软件组建电力牵引传动系统和控制系统的模型,实现机车总体结构、轮轨关系以及控制算法的全仿真。为了实现虚拟样机的联合仿真,首要解决的就是两套软件之间的联合仿真问题,通过ADAMS/Rail 软件中自带的Control模块实现与Matlab/Simulink 软件之间的联合仿真。基于ADAMS/Rail 软件与MATLAB 软件的虚拟样机仿真平台的具体实现过程如下。
(1)在ADAMS/Rail 中构建机车的虚拟样机模型,并确定电力机车的虚拟样机模型的输入变量和输出变量。
(2)将MATLAB/Simulink 软件的启动路径设置到ADAMS/Rail 软件的启动路径中,从而达到两套不同软件的联合仿真,并在MATLAB/Simulink 软件中将机车多体动力学模型转换为对应的Simulink模块。
(3)将电力机车虚拟样机的Simulink 模块、电气系统模型和控制系统模型进行组建,并采用批处理方式,实现虚拟样机的联合仿真。
3 组合粘着控制方法
与其他粘着控制方法相比,组合粘着控制方法由于其算法简单、容易实现等优点,在实际中已经得到了广泛使用,其工作原理方框图如图2 所示。

图2 原理方框图
我们在组合粘着控制系统中,通常采用动轮对的轮周加速度判断机车轮轨粘着情况。当轮周加速度比加速度阈值大的时候,组合粘着控制系统依据加速度标准法来进行对牵引电机转矩相应的削减、维持或者缓慢恢复。组合粘着控制系统缓慢恢复牵引电机转矩的同时,继续对轮周加速度进行检测判断,如果继续大于加速度阈值,这就需要进一步对牵引电机的转矩进行削减,当加速度值小于设定的阈值时停止削减。在使用加速度标准法控制完成后,控制系统需要继续对机车动轮运行情况进行判断,当发现动轮再次出现空转时,控制系统不再采用加速度标准法,而是采用蠕滑速度标准法来进一步调节和控制牵引电机的转矩。与此同时,机车转向架上所有轮对的蠕滑速度是可以通过观测器估算的车速以及轮周线速度计算得来的。当机车蠕滑速度高于阈值时,控制系统继续采用蠕滑速度法来对牵引电机的转矩进行调节和控制。在恢复牵引电机转矩的同时,控制系统对蠕滑速度再次进行判断,如果蠕滑速度值仍然高于控制阈值,需要继续削减牵引电机的转矩,直到蠕滑速度小于阈值时停止削减牵引电机的转矩。本文采用的组合粘着控制方法使用蠕滑速度标准法。
4 系统仿真试验
设置加速度阈值为a=5 m/s2,蠕滑速度阈值为υsilp=0.24 m/s。仿真虚拟样机模型中机车质量约为92 吨,机车轴重约为26 吨,牵引重量450 吨,牵引转矩指令Te=2500 N·m。图1 上的曲线分别为潮湿轨面和干燥轨面的粘着特性曲线,干燥轨面的粘着系数值远大于潮湿轨面。为了验证粘着控制系统的有效性,在系统仿真开始后,机车先运行在干燥轨面上;在仿真进行到第6 秒时,通过修改仿真系统的轨面参数,使得轨面从原来的干燥轨面快速切换进入到潮湿轨面,机车开始在潮湿轨面上运行;在仿真进行到第18 秒时,再次修改轨面参数,使得轨面再由潮湿轨面快速切换进入到干燥轨面,机车再次在干燥轨面上运行。通过机车运行轨面从高粘着系数到低粘着系数,再从低粘着系数到高粘着系数的变化,能够很好地验证粘着控制系统是否满足设计目标,其仿真结果如图3、图4、图5所示。

图3 机车速度和轮对的速度

图4 机车轮对的蠕滑速度

图5 牵引电机输出转矩及负载
分析仿真过程,机车在第6 秒从干燥轨面切换进入潮湿轨面,粘着系数也从较高值突然降低为较低值,造成此时的加速度大于加速度阈值,机车牵引转矩根据加速度标准法进行调整。由图5 可得,在第6 秒牵引转矩等于零,而机车牵引转矩从第7 秒开始恢复。在牵引电机的转矩缓慢不断恢复的过程中,因为蠕滑速度值高于设定阈值,牵引电机的转矩根据蠕滑速度标准法进行调整。此时牵引转矩缓慢降到零,而且保持0.2 秒的零位,然后通过粘着控制系统控制其继续恢复牵引转矩。由于牵引电机的转矩始终在组合粘着控制系统的调节下,保证了蠕滑速度一直不高于系统设定的阈值,进而保证了机车尽管在低粘着系数的潮湿轨面上运行,轮轨间依然保持在粘着状态。当机车从潮湿轨面切换到干燥轨面时,机车依靠轨道与动轮间的粘着作用力能够实现平稳运行。综合分析仿真结果可得,组合粘着控制系统能够有效防止机车空转情况的发生,达到了设计目标。
[1]李江红,马健,彭辉水.机车粘着控制的基本原理和方法[J].机车电传动,2002(6):4-8.
[2]任强.重载机车粘着控制方法的研究与设计[D].成都:西南交通大学,2014.
[3]王德之,詹斐生,余也艺.轮轨粘着机制和粘着控制[M].北京:中国铁道出版社,1990.
[4]黄景春,肖建,刘陆洲.基于多学科虚拟样机的粘着控制仿真平台[J].系统仿真学报,2010,22(10):2384-2386.
[5]黄景春,唐守乾.基于轨面辨识的电力机车粘着控制仿真研究[J].计算机仿真,2015,32(1):206-209.
[6]黄景春,任强,王嵩,等.基于改进扰动观测器的电力机车粘着控制[J].计算机仿真,2013,30(10):208-212.
[7]严大考,李猛,郭朋彦,等.基于Matlab 的智能车软件系统设计与仿真[J].计算机应用与软件,2014,31(1):256-259.
[8]刘勺华,贝绍轶,赵景波,等.基于SIMPACK 和MATLAB的汽车半主动悬架模糊控制及联合仿真[J].机械设计与制造.2011(12):64-66.
猜你喜欢
计算机与生活(2022年1期)2022-01-18
南京理工大学学报(2021年4期)2021-09-15
湖南工业大学学报(2020年6期)2020-11-27
装备机械(2020年3期)2020-09-29
铁道通信信号(2020年10期)2020-02-07
中国设备工程(2019年7期)2019-05-10
铁道建筑(2018年12期)2019-01-05
中国铁道科学(2015年6期)2015-06-21
中国铁道科学(2015年5期)2015-06-21
中国铁道科学(2014年1期)2014-06-21