基于飞行器姿态控制系统的导引头跟踪实验
2015-03-27 03:02王佳伟杨亚非钱玉恒
实验技术与管理 2015年6期
王佳伟, 杨亚非, 钱玉恒
(哈尔滨工业大学 飞行器控制实验教学中心, 黑龙江 哈尔滨 150001)
基于飞行器姿态控制系统的导引头跟踪实验
王佳伟, 杨亚非, 钱玉恒
(哈尔滨工业大学 飞行器控制实验教学中心, 黑龙江 哈尔滨 150001)
为形象地模拟导弹跟踪目标时的姿态控制和调整过程,提高学生对于飞行器控制课程的理解,开发了飞行器姿态控制系统的导引头跟踪实验。介绍了实验系统的组成,包括硬件结构和软件平台;阐述了导引头跟踪目标实验的原理,分别验证了在目标静止和运动情况下,导引头对目标进行跟踪的效果,并且得到了仿真图形。
飞行器姿态控制系统; 导引头; 目标跟踪
导引头是导弹系统的重要组成部分,作用相当于导弹的“眼睛”,通过导引头跟踪需要打击的目标,获取目标的图像或者坐标,然后选择相应的制导律来控制导弹飞行的轨迹和姿态,最终成功击落目标[1-5]。上述过程的实验仿真可以全部通过软件编程来实现,优点是成本低、易于实现,但实验效果不理想,学生难以形成感性的认识。哈尔滨工业大学飞行器控制实验教学中心自制了飞行器姿态控制系统来模拟导弹导引头的工作过程,学生可以通过该系统进行导弹制导律的设计和仿真验证,更好地掌握理论课程的学习内容。
1 系统组成原理
飞行器姿态控制系统由转台本体、电控箱、运动控制器、传感器件和软件平台组成(见图1)。

图1 系统总体组成图
1.1 转台本体
转台本体如图2所示,由2个转动的机械结构件、伺服电机以及限位开关组成。结构设计采用U字形,具有位置、速率、摇摆和仿真运动功能,可用于各类飞行器目标特性飞行控制系统仿真试验。

图2 转台本体
转台的3个轴均采用直流力矩电机加增量式光电编码器控制。伺服电机为40 000线,采用专用ADT-8940A1运动控制卡进行控制,可实现单轴相对运动,多轴插补运动等多种运动。转台在极限位置装有2个限位开关,当转台运动到限位处时,限位信号使转台即刻停止。转台上安装视觉传感器(摄像头)模拟导弹的导引头,通过3个直流伺服电机来控制该导引头的3个轴的运动,进行目标跟踪。
靶标上的LED是用来模拟导弹所要跟踪或者拦截的目标,可以通过串口发送命令控制点亮任意LED。靶标的转动是模拟目标的位置变化,采用步进电机驱动,步进电机步进角为1.8°,驱动器进行200细分,即发送40 000脉冲步进电机旋转一圈。
1.2 电控箱
电控箱内安装有如下主要部件:伺服驱动器、I/O接口板、开关电源、开关、指示灯等电气元件。
(4)技术力量在突破人类中心论中扮演了重要角色。因为技术力量对人类行为及其后果的改变,使得伦理学研究范畴超越了传统的时间和空间范围,因此,势必将打破大部分早期伦理体系中的人类中心论地位。与早期伦理学关注人、人的行为和行为后果不同,技术时代的伦理视域已经扩展开来,并逐渐呈现出一种宏大的、整体的视角。人的伦理学不仅关注人,而且关注人类整体,关注人类处于其中的自然。此外,从一种存在主义的视角看,人类的独断的情感和态度,与人类自身生存的未来已经不相符合,对人类自身,尤其是大自然的认识需要调整适应,建立一种突破人类中心论的伦理学势在必行。
伺服驱动器MLDS3810为直流伺服驱动器,它接收来自ADT-8940A1运动控制卡的PWM和DIR控制信号。
1.3 运动控制器
运动控制卡ADT-8940A1是基于PCI总线的高性能四轴伺服/步进控制卡,安装在计算机上。可支持多达16块控制卡,可控制64路伺服/步进电机,支持即插即用,采用脉冲输出方式。
1.4 系统软件控制平台
实验平台仿真系统的开发软件为Matlab7.0,通过Matlab7.0中图形用户界面(GUI)的程序编写,控制程序与运动控制卡及硬件平台的连接关系如图3所示。
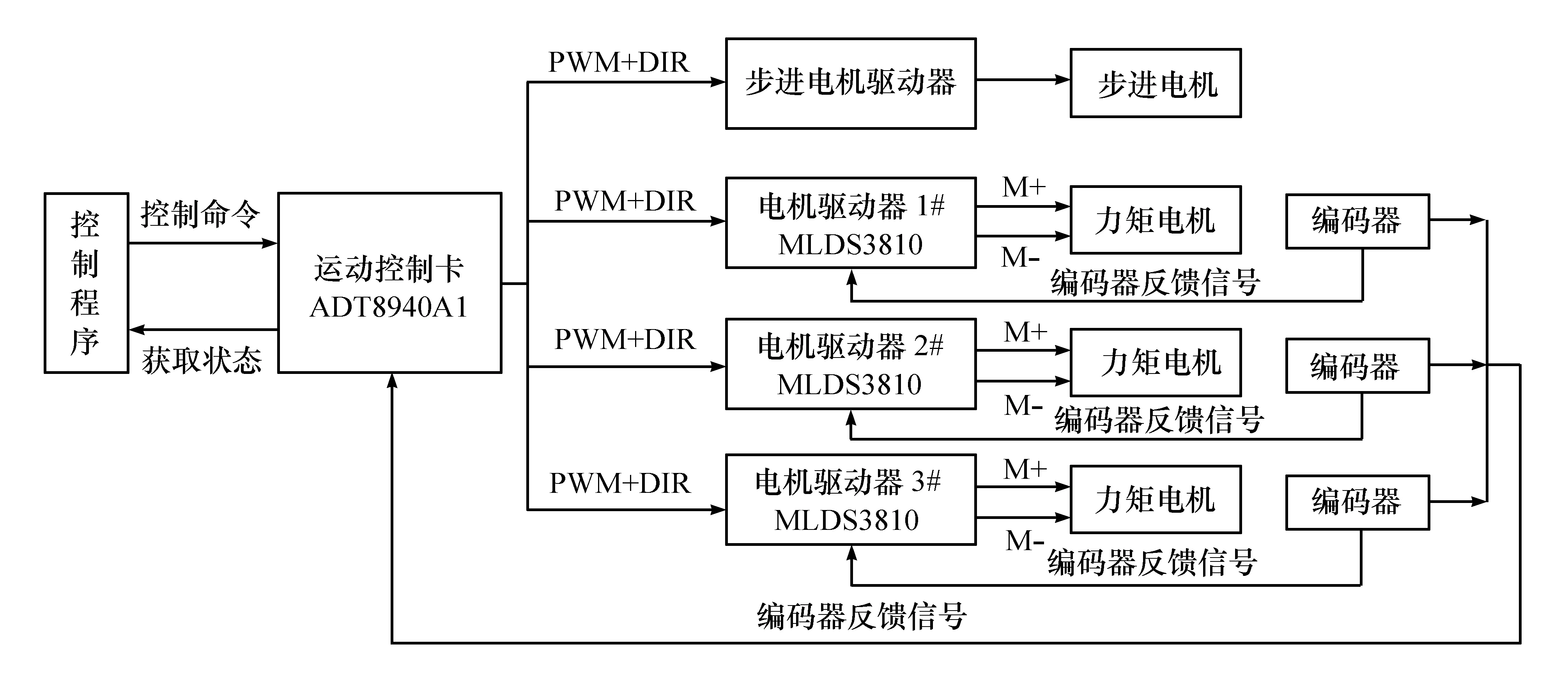
图3 软件控制过程
2 导引头跟踪实验原理
靶标上点亮的LED灯模拟所要跟踪或拦截的目标,通过步进电机控制靶标运动来模拟目标的运动情况。首先利用转台上安装的摄像头模拟导弹的导引头,进行目标图像的获取,通过图像算法进行处理,得到目标的位置信息;然后利用该位置信息作为给定输入,选择制导律,通过转台的3个力矩电机控制转台的运动,进而实现导引头对目标的准确和实时跟踪。
常用的图像处理算法有很多种[6-11],包括图像变换、图像编码压缩、图像增强和复原等。
本文选择的图像处理算法按照以下步骤进行:
第二步:对获得的图像进行切割,缩小图像处理的时间;
第三步:灰度拉伸,图像滤波处理;
第四步:二值处理,然后获取目标点的质心位置坐标(x,y)。
经过图像处理后得到坐标(x,y),作为目标跟踪部分的给定输入。选择控制器的控制方法,可选PD控制和PID控制,输出的控制信号经过电机驱动器,驱动力矩电机的运动,进而调整飞行器的姿态,即俯仰角和偏航角,使得导引头始终能够跟踪目标。不论跟踪静止或运动的目标,如果LED灯的图像始终位于视场的中心位置上,则说明实现了视觉跟踪。
3 导引头跟踪实验仿真
程序的界面如图4。左边是实时状态显示:第一个坐标图是实时将图像采集单元采集到的视频动态显示出来,图右侧显示的状态是实时的转台角度大小以及转台角度变化率;第二个坐标图则显示转台角度变化曲线。控制方法栏可以改变当前的控制方法或者控制方法的参数。

图4 静态目标跟踪的程序界面
界面右侧主要是控制方式和控制按钮。控制方式框中可以选择靶标是否运动,若选择靶标运动,则靶标以转动角度框中的输入速度进行匀速转动;若选择靶标静止,则靶标首先转动到转动角度框中的角度,然后静止下来。控制方式面板可以设置LED运动变化率。若选择LED变化,则LED按照设定的LED变化速率,在靶标上反复顺次点亮;若选择LED不变,则LED灯从默认的24号灯处,逐个亮到指定的LED灯号,然后静止不再变化。
3.1 静态目标跟踪
静止目标的跟踪主要是验证图像处理部分的功能,验证图像处理算法的有效性。
实验步骤是:在“控制方式”的“设置靶标”中选定“靶标静止”,静止的位置设置为5°;在“设置LED”中,选择“LED不变”,则LED保持不变,即目标保持静止。导引头的初始位置可以是任意的,因此LED的出现不一定在视场的中心,导引头获取图像,图像经过软件实时处理,可以得到LED灯的位置坐标(x1,y1),将其作为2个输入,分别加到2个控制闭环上(见图5),选择PD控制器,指定P、D参数。
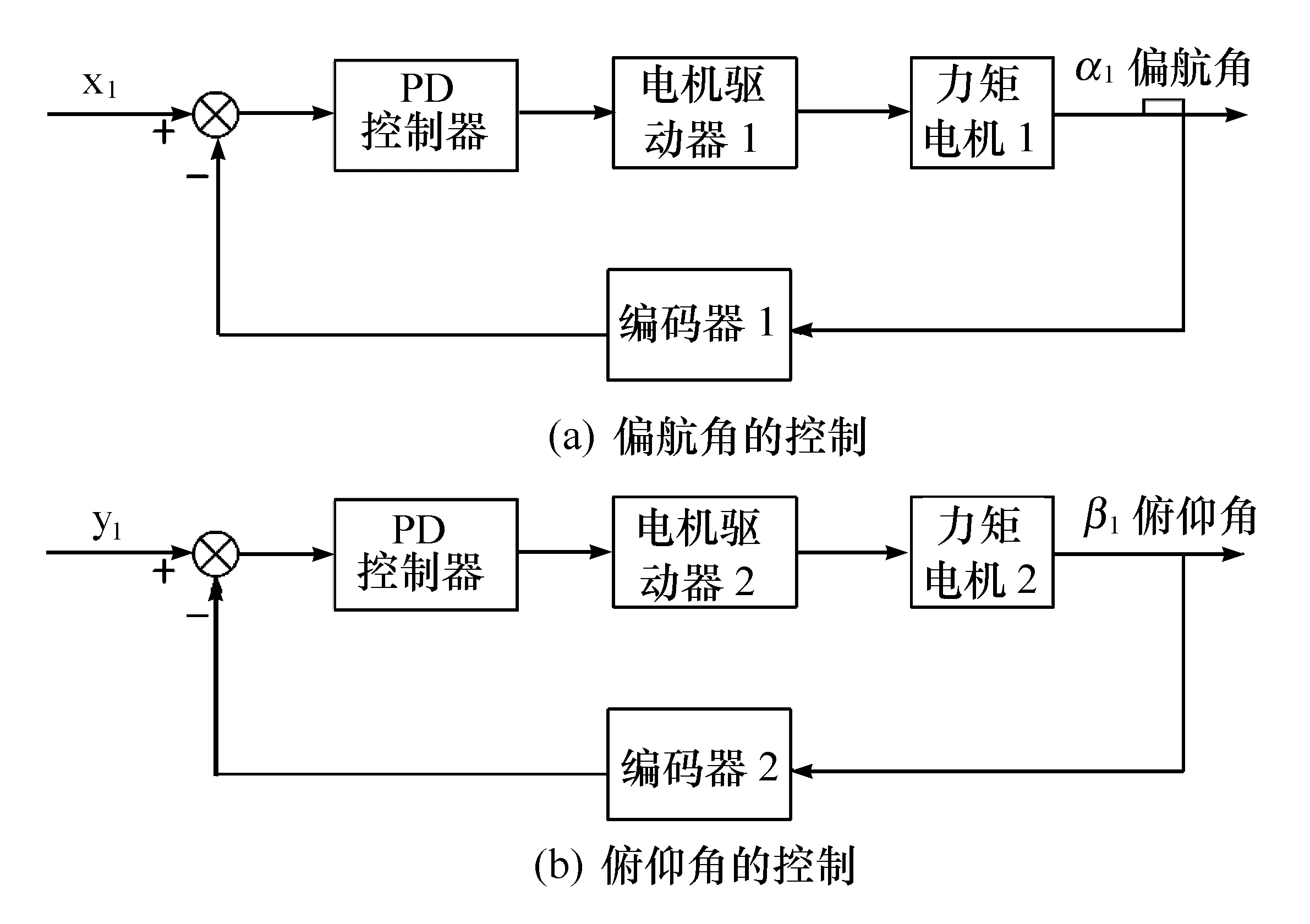
图5 静态目标的跟踪控制
经过闭环控制的作用,电机控制转台运动,使得转台的俯仰角和偏航角发生变化,达到使导引头对准目标的目的,这时目标出现在视场的中心,如图4中左上的坐标所示。由于是静态的目标,之后转台的俯仰角和偏航角保持不变,如图4中坐标系中的曲线所示。
3.2 运动目标跟踪
运动目标的跟踪是验证目标位置跟踪算法的有效性和精度。
实验步骤:靶标仍然设置为静止,位置可保持在5°;在“设置LED”中,选择“LED变化”,变化速率为每秒1个灯,则相当于目标是运动变化的。导引头获取图像,经过软件实现图像处理,可以得到LED灯的位置坐标(x2,y2)。将位置坐标作为2个输入,分别加到2个控制闭环上,选择PID控制器,指定P、I、D参数(见图6)。

图6 运动目标的跟踪控制
通过图7可以看出,经过闭环控制的作用,电机带动转台运动,使得转台的俯仰角和偏航角发生变化,达到使导引头对准目标的目的,这时目标出现在视场的中心,如图7中左上的坐标图所示。由于是运动的目标,目标的位置是不断变化的,则转台的俯仰角和偏航角跟随着变化,如图7中第2个坐标图中的曲线所示,保证了目标始终处于视场的中心位置处,实现了跟踪目标的目的。
4 结束语
飞行器姿态控制实验系统为飞行器控制课程提供了一个很好的实验仿真验证平台,解决了软件仿真的不足,所设计的制导律符合工程实际的要求,使得学生得到了良好的实践锻炼。

图7 运动目标跟踪的程序界面
References)
[1] 赵善彪.红外导引头综述[J].飞航导弹,2006(8):42-45.
[2] 毛峡,张俊伟.半捷联导引头光轴稳定的研究[J].红外与激光工程,2007,36(1):9-12.
[3] 李世忠,李相平,李亚昆,等.毫米波导引头的技术特点及发展趋势[J].制导与引信,2007,28(1):11-15.
[4] 杨卫平,沈振康.红外成像导引头及其发展趋势[J].激光与红外,2007,37(11):1129-1132.
[5] 范晋祥.美国动能拦截弹红外成像导引头的发展分析[J].红外与激光工程,2009,38(1):1-6.
[6] 周心明,兰赛,徐燕.图像处理中几种边缘检测算法的比较[J].现代电力,2000,17(3):65-69.
[7] 刘志才,李志广.红外热像仪图像处理技术综述[J].红外技术,2000,22(6):27-32.
[8] 程正兴,林勇平.小波分析在图像处理中的应用[J].工程数学学报,2001,18(增刊):57-86.
[9] 王树文,闫成新,张天序,等.数学形态学在图像处理中的应用[J].计算机工程与应用,2004(32):89-92.
[10] 高浩军,杜宇人.中值滤波在图像处理中的应用[J].电子工程师,2004,30(8):35-36.
[11] 张旭明,徐滨士,董世运.用于图像处理的自适应中值滤波[J].计算机辅助设计与图形学学报,2005,17(2):295-299.
Seeker tracking experiment based on spacecraft attitude control system
Wang Jiawei, Yang Yafei, Qian Yuheng
(Experiment and Training Center for Flight Vehicle Control,Harbin Institute of Technology,Harbin 150001,China)
The spacecraft attitude control system can simulate the process of attitude control and adjustment of missile while tracking target,and improve the students’ understanding of the courses for spacecraft control. Firstly,the structure of the experimental system is introduced,including the hardware structure and software platform,and then the principle of seeker tracking target experiment is explained. Finally,the effect of seeker tracking to the target is verified through the target stationary and mobile cases,and simulation graphics are given.
spacecraft attitude control system; seeker; target tracking
2014- 10- 25
黑龙江省教学研究项目(JG2013010268)
王佳伟(1982—),男,黑龙江哈尔滨,在读博士生,工程师,主要研究方向为控制系统的实验研究和故障诊断.
E-mail:wangjiawei1982@163.com
TP271
A
1002-4956(2015)6- 0120- 03
猜你喜欢
机电工程技术(2022年8期)2022-09-22
装备制造技术(2021年1期)2021-05-21
科技创新与应用(2019年32期)2019-12-02
自动化学报(2018年2期)2018-04-12
制造技术与机床(2017年3期)2017-06-23
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年3期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11