基于RTWT的自动控制原理实验设计与实现
2015-03-27 03:02杨丽艳柏艳红
实验技术与管理 2015年6期
杨丽艳, 李 虹, 柏艳红
(太原科技大学 电子信息工程学院, 山西 太原 030024)
基于RTWT的自动控制原理实验设计与实现
杨丽艳, 李 虹, 柏艳红
(太原科技大学 电子信息工程学院, 山西 太原 030024)
针对现有的EL-AT-Ⅲ自动控制实验箱扩展性不好、实验内容陈旧、难以实现高阶系统和复杂控制算法实验的缺点,开发了基于Simulink/RTWT的半实物仿真实验系统。实物部分采用实验箱的运放、电阻、电容搭建实验电路,或接入锅炉、水箱等实物对象,仿真部分通过Simulink搭建控制框图,RTWT保证程序实时运行。该实验系统具有开放性,有助于培养学生的工程意识和设计系统、调试系统的能力。
自动控制原理实验; 半实物仿真; RTWT; 实验教学
太原科技大学“自动控制原理”课程实验采用EL-AT-Ⅲ型实验箱。基于该实验箱的传统实验方法存在以下不足:(1)学生在不了解实验原理的情况下,依照配套实验指导书完成一些插线工作,就可以在显示器上观察到实验结果,难以达到预期的实验教学目的;(2)实验箱的可扩展性差,可改的参数有限,难以开展设计型和综合型实验;(3)实验箱仅能完成经典控制理论的一些简单验证型实验,无法进行现代控制理论、复杂控制算法研究类实验;(4)与实际工程应用联系不紧密,学生无法了解实际控制系统所有的环节[1-6]。
针对上述缺陷,设计了基于Simulink/RTWT的半实物仿真实验系统。该系统不仅能完成自控原理基础性实验,还能完成被控对象测试建模、控制算法设计、控制系统实时仿真等实验。开放性的平台提供给学生自由发挥、扩展的空间,逐步训练学生解决实际工程问题的能力。
1 基于RTWT的实验系统构建
1.1 实验系统的硬件构建
自动控制原理实验系统的硬件是在实验室现有的计算机、研祥数据采集卡、EL-AT-Ⅲ型模拟实验箱的基础上重新构建而成的,实验系统框架如图1所示。计算机用于实验软件的运行;数据采集卡是计算机与实验箱、实物对象的接口,实现A/D、D/A转化;实验箱配备多个运放、电阻、电容,可搭建各种控制对象。
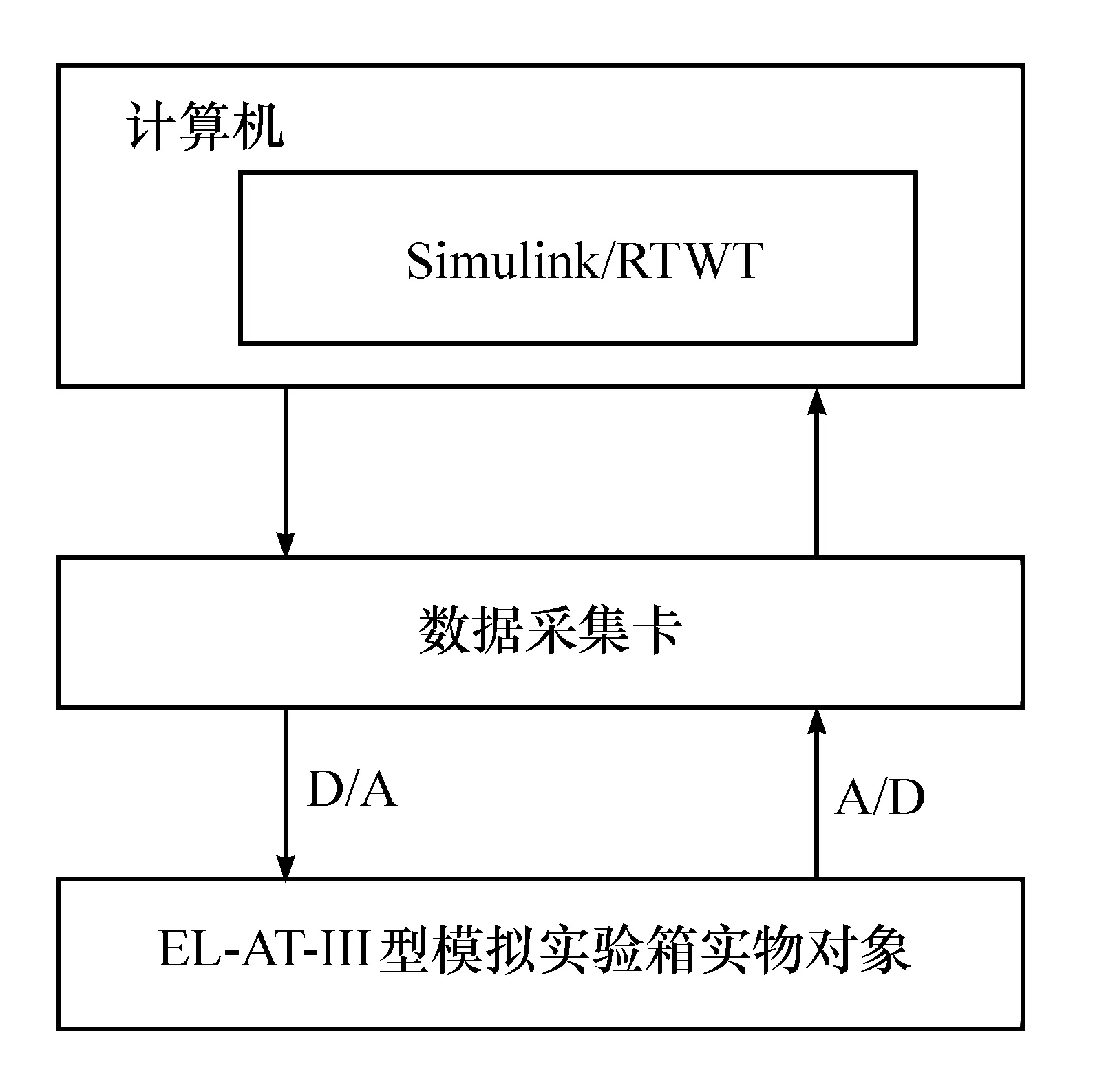
图1 基于RTWT的实验系统框架
1.2 实验系统的软件平台
实验系统的软件平台基于Matlab/Simulink/RTWT开发。RTWT是Simulink的附加产品,采用实时内核以保证应用程序实时运行,与一台PC机即可构成半实物仿真系统[7-12]。笔者采用Simulink搭建实验模型,RTWT保证实时运行。软件平台采用模块化设计,方便移植和修改,包括硬件驱动模块、复杂控制算法模块等。这些模块封装在Simulink模块库中,学生实验时只需拖动相应模块、修改参数即可。
1.3 实验系统构建技术关键
(1) RTWT环境下采集卡的驱动程序编写。RTWT下的驱动程序是由C语言编写的S函数,用以实现对采集卡寄存器的读写操作。课题组已开发出RTWT环境下研祥数据采集卡的多通道AI、AO、DI、DO驱动程序。
(2) 数据采集卡与实验箱、实物对象的连接。数据采集卡的输入、输出信号为-10~10 V,EL-AT-Ⅲ型模拟实验箱的输入、输出电压范围为-5~5 V,可直接和数据采集卡的输入输出端连接而无需信号转换。但锅炉、水箱等实物对象的信号为电流信号,需要通过外围信号转换电路与数据采集卡连接。
(3) 所有的地端共用实验箱的GND,防止信号干扰。
(4) 计算机与模拟实验箱电路要同步。由于模拟实验箱的积分器工作与计算机程序运行之间存在时间差,可在计算机开始工作时通过DO口向实验箱发出控制指令,实现同步仿真,避免实验箱电路因初始条件等因素对实验结果产生影响,提高实验系统的精确性和可重复性。
2 基于RTWT实验系统的实现
实验系统中数据采集卡的AI接口用于被控对象模拟信号的采集;AO接口用于计算机输出指令信号和控制信号到被控对象的转换。实验系统实现的一般过程如下。
(1) 搭建实验箱电路。在实验箱上通过运放、电阻、电容搭建实验电路。
(2) 建立系统Simulink模型。在Simulink环境中加载AI、AO、Scope、信号源及其他模块,建立实验模型和算法。一个具有基本输入输出的Simulink系统模型如图2所示。

图2 基本输入输出Simulink系统模型
(3) 设置参数。对Solver、Hardware Implementation、Real-Time Workshop面板的相关参数进行设置。
(4) 创建并执行实时应用程序。在Simulation的选单中,选择External模式,点击Real-Time Workshop/Build Model,自动生成在实时内核中运行的应用程序。点击Connect to Target,建立Simulink与内核的连接后,点击Start Real-Time Code,启动实时应用程序的执行。
(5) 观测响应曲线,分析性能指标。
3 实验内容安排
根据我校自动化实验教学要求,设置了3个类型的实验。其中:
验证型实验4个:典型系统单位阶跃响应分析实验,控制系统稳定性分析实验,增加开环零、极点、偶极子对系统性能的影响实验,系统频率特性分析实验;
设计型实验3个:控制系统的串联校正实验,PID控制器设计及参数整定实验,具有状态观测器的状态反馈系统设计实验;
综合型实验1个:锅炉压力控制系统的研究。
本文在三大类型实验中各举一例说明其实现方案。
3.1 控制系统稳定性分析实验
以三阶系统为例进行稳定性分析。在实验箱搭建图3所示模拟电路。其开环传递函数为
其中Rx为可调电阻阻值,可调范围为0~500 kΩ。实验时只需改变Rx就可以调节系统的开环增益k,从而改变系统的稳定性能。
在Simulink中建立图2所示模型。依上述系统实现步骤实时仿真,观察Rx取值变化时的单位阶跃响应曲线。图4为Rx取值为50 kΩ、40 kΩ、33kΩ,即k为10、12.5、15的系统响应曲线。图中k=12.5时系统临界稳定,而根据劳斯判据理论计算,k=12时系统临界稳定。二者的略微差别是由实验箱可变电阻读数不准确造成的。学生在实验时应注意在理论计算值附近寻找临界稳定点。

图3 三阶系统模拟电路图

图4 控制系统稳定性分析响应曲线
3.2 具有状态观测器的状态反馈系统设计实验
给定二阶系统作为实际物理系统,结构框图、实验箱模拟电路图如图5所示。要求用实验箱搭建模拟电路,在Simulink中构建状态观测器,引入状态反馈,使系统的闭环极点为-7.07±j7.07。

图5 实际系统结构框图、实验箱电路图
系统的状态空间模型可表示为

通过计算得到状态反馈矩阵K=[9.9 -5.9],状态观测器的输出反馈矩阵H=[-5.9 4]T。
实验的Simulink模型如图6所示。其中AI将实际系统输入量u、输出量y输入到重构系统——状态观测器中;AO将观测器仿真产生的状态量x反馈给实际系统以实现状态反馈。依实验步骤实时仿真后,响应曲线如图7所示。可以看出,实际系统和状态观测器的输出响应曲线略存差异,这是由于实验箱元器件参数不理想造成的,但仿真模型的状态量可以作为实际系统的状态估计值。
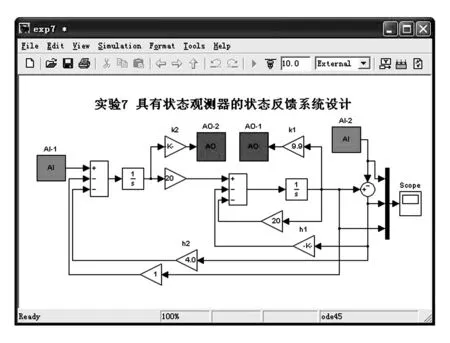
图6 状态观测器和状态反馈Simulink模型

图7 系统单位阶跃响应曲线
3.3 锅炉压力控制系统的研究综合型实验
锅炉压力控制系统研究要求学生完成锅炉压力系统的特性测试、模型参数确定及控制算法设计,实验难度较大,由多名学生组成小组完成。采集卡与锅炉控制系统的连接图如图8所示,锅炉控制系统的Simulink模型如图9所示。
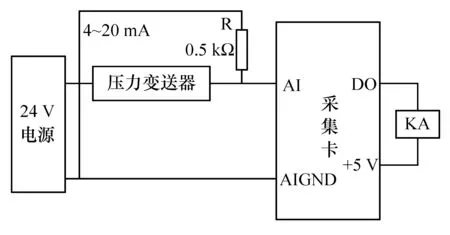
图8 采集卡与锅炉连接电路

图9 锅炉控制系统的Simulink模型
首先,进行锅炉压力系统特性研究。由于锅炉压力在开环状态下一直上升,无法进入稳态,因此采用闭环控制测试其稳态特性。根据实验数据可以确定锅炉压力系统含有积分环节,为非自衡系统,其传递函数形式为G(s)=k/s。
其次,采用开环控制进行动态特性测试。根据开环控制压力响应的曲线斜率计算出k值。
最后,根据对象传递函数设计控制算法。可设计压力控制系统的内模、模糊控制器等,并进行测试。
4 结束语
基于RTWT的半实物仿真自控原理实验系统,可让学生直观感受到真实控制系统的各个环节,既帮助学生掌握相关理论知识,又能增强学生的动手能力和解决实际问题的能力。该实验平台可扩展性强,支持多种被控对象和控制算法设计,提供给学生一个发挥的平台,实验教学效果较好。
References)
[1] 结硕,韩光胜.Matlab在自动控制原理实验中的应用[J].实验技术与管理,2012,29(2):95-97.
[2] 刘金颂,张庆阳,苏晓峰,等.Matlab软件在自动控制原理实验中的应用[J].实验技术与管理,2014,31(6):138-140.
[3] 刘中,袁少强,张军香.自动控制原理实验课的改革与实践[J].实验室研究与探索,2013,32(11):403-406.
[4] 丁勇前.自动控制理论课程工程教学设想[J].实验室研究与探索,2005,24(增刊):186-187.
[5] 赵剑锋,吴继平.基于LabVIEW的自动控制原理虚拟实验系统[J].电气电子教学学报,2007,29(1):85-87.
[6] 陈今润,张赟宁,龙力.自动控制原理综合实验平台建设构想[J].实验室研究与探索,2005,24(增刊):370-373.
[7] 杨涤,李立涛,杨旭,等.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.
[8] Bai Yanhong,Liu Cong. Research on Performance of Two Real-Time Simulation Environments: RTWT and xPC Target[J].Advanced Materials Research,2014,889:1257-1261.
[9] 费庆,李保奎,王晓平,等.基于Simulink/xPC的过程控制综合实验平台改造[J].实验技术与管理,2011,28(11):286-289.
[10] 柏艳红,赵志娟,孙志毅,等.基于RTWT的锅炉硬件在回路仿真系统开发[J].系统仿真学报,2013,25(2):340-345.
[11] 袁少强,张增辉,陈砾,等.基于RTW的混合仿真计算机开发与应用[J].系统仿真学报,2009,21(3):700-702.
[12] Enikov E T. Mechatronic Aeropendulum: Demonstration of Linear and Nonlinear Feedback Control Principles With MATLAB/Simulink Real-Time Windows Target[J].IEEE Transaction on Education,2012,55(4):538-545.
Design and realization of Automatic Control Theory experiment based on RTWT
Yang Liyan, Li Hong, Bai Yanhong
(School of Electronics and Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Aiming at the drawbacks of the existing Automatic Control Theory experiment,such as no extending space,out-dated contents,difficult to achieve high order system,modern control theory and complex control algorithm,a semi-physical simulation experimental system based on Simulink/ RTWT is proposed. Physical parts adopt experiment box,boiler,water tank and so on.Simulation parts build Simulink model.The RTWT guarantee program runs in real time.Practice shows that the system can not only make up the defects of the experimental box,but also improve students’ enthusiasm,cultivate their engineering consciousness,develop their ability to design and debug systerms with its open platform.
automatic control theory experiment; semi-physical simulation; RTWT; experimental teaching
2014- 11- 24
山西省教学研究改革项目(J2013146)
杨丽艳(1989—),女,山西运城,硕士研究生,主要研究方向为控制理论与控制工程
李虹(1965—),女,山东潍坊,博士,教授,硕士生导师,副院长,研究方向为非线性系统.
G642
A
1002-4956(2015)6- 0123- 04
猜你喜欢
中国测试(2022年2期)2022-03-19
装备制造技术(2021年4期)2021-08-05
制造技术与机床(2017年8期)2017-11-27
网络安全与数据管理(2016年4期)2017-01-10
铁道通信信号(2016年12期)2016-06-01
海峡科技与产业(2016年3期)2016-05-17
电子器件(2015年5期)2015-12-29
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09