
多视场热像仪变倍机构设计技术研究
2015-04-02 06:19张卫锋赵劲松史衍丽康丽珠何红星徐参军郑传武
红外技术 2015年12期
张卫锋,赵劲松,史衍丽,陶 亮,康丽珠,何红星,唐 晗,徐参军,郑传武,赵 强
多视场热像仪变倍机构设计技术研究
张卫锋,赵劲松,史衍丽,陶 亮,康丽珠,何红星,唐 晗,徐参军,郑传武,赵 强
(昆明物理研究所,云南 昆明 650223)
介绍了多视场热像仪变倍机构设计技术。从结构设计的角度出发,对多视场热像仪常用的几种变倍机构的工作方式、光机结构特点及设计技术要点进行分析与研究,指出不同机构型式的优缺点和适用性。总结了多视场热像仪变倍机构设计的主要原则。
多视场热像仪;变倍机构;光机系统
0 引言
红外成像技术是利用目标和背景自身红外辐射的差异或它们对自然光源的反射差异来成像的,一般用于夜间及昼间不良气象条件下对目标的探测、识别、跟踪和瞄准,属于被动成像技术,因此具有较强的隐蔽性和抗干扰能力,在军事和民用领域都具有广泛的应用[1-4]。一般红外热像仪的多种功能需要采取多视场来实现,多视场红外光机系统的设计决定着热像仪的作用距离、外形尺寸、重量、光轴一致性和可靠性等主要技术指标,也是高性能多视场热像仪的主要设计难点。本文针对多视场热像仪变倍光机系统的设计技术进行了分析和研究。
1 热像仪主要组成及其工作原理
一般热像仪主要由红外光学系统、探测器/制冷机组件、壳体、调焦变倍机构、成像电路组件等组成,其工作原理如图1所示。红外光学系统接收来自远处景物的红外辐射,并将目标红外辐射汇聚成像在探测器的焦平面上,通过成像电路组件完成光电转换和信号处理,输出标准视频信号,最终显示在显示器上。热像仪通过调焦变倍机构控制相关透镜组的移动来实现焦距(视场)的变化,完成不同视场间的切换功能。
热像仪根据其调焦变倍过程中光学系统的焦距值变化规律可分为2大类:一类是连续变焦(倍)光机系统,通过变倍透镜组及补偿透镜组的相对运动以实现光学系统焦距值的连续变化;另一类是间断变焦(倍)光机系统,即通过切换光学系统中的相关透镜组来间断地改变光学系统的焦距值,完成不同视场间的切换,变倍过程中光学系统不能清晰成像,这种间断变焦光机系统又可分为轴向变倍光机系统和径向变倍光机系统。
在变倍光机系统设计过程中,由于单个透镜的焦距是固定不变的,因此,一般需要通过改变系统中不同透镜之间的间隔来实现光学系统组合(等效)焦距的变化。变倍光机系统的基本原理是利用光机系统中1个或多个透镜组的移动来改变系统的组合焦距。但是,当一个透镜组移动时,系统的像面位置也随之发生相应的变化,为了保证系统最终像面位置的稳定,需要通过移动另一个透镜组来进行像面位移补偿。因此,习惯上把引起焦距变化的透镜组称为变倍组,起到补偿像面位置作用的透镜组称为补偿组。一般变倍光学系统通常由前固定透镜组、变倍透镜组、补偿透镜组、后固定透镜组4个部分组成[5-10],如图2所示。根据变倍透镜组和补偿透镜组运动型式的不同将变焦方式分为光学补偿变焦和机械补偿变焦。

图1 热像仪工作原理示意图
Fig.1 Diagram of multiple field-of-view thermal imagers

图2 变倍光机系统的变倍和补偿工作原理示意图
2 机械补偿红外连续变倍光机系统
机械补偿红外连续变焦光机系统一般为轴向运动2组透镜实现连续变焦,如图3所示。结构设计时要确保变倍透镜组和补偿透镜组能够沿光轴方向按照不同的移动轨迹相向连续移动,在保证像质不变的情况下实现连续变焦功能。在实际使用过程中发现,变倍透镜组和补偿透镜组移动过程中会引起系统光轴的跳动,而光轴跳动量的大小直接影响热像仪的成像质量和光轴一致性,因此变倍透镜组和补偿透镜组的驱动和导向机构的设计成为热像仪结构设计的关键技术。在连续变焦过程中,通常情况下是变倍透镜组做线性移动,补偿透镜组做非线性移动。
为减少驱动机构数量,连续变倍的热像仪通常采用的机构是圆柱凸轮驱动机构,通过圆柱凸轮的旋转带动变倍透镜组和补偿透镜组分别做线性运动和非线性运动,改变变倍透镜组和补偿透镜组的相对位置,使光学系统的等效焦距产生连续性变化。但是,设计的导向机构要确保在变倍过程中成像始终清晰,像面位置不变。在进行圆柱凸轮结构设计时,需要根据变倍组和补偿组的运动曲线在圆柱的圆周上设计出相应的曲线槽,变倍组和补偿组分别通过各自的导向杆(或轴承)和圆柱凸轮关联,如图4所示。这种红外连续变焦热像仪的光机设计和变倍机构设计均有较大难度,变倍凸轮槽镜筒的结构设计和加工更是实现连续变焦成像的关键。结构设计必须考虑变倍机构运动的平滑性和变倍过程的快捷性。变倍凸轮槽设计与加工的精度,将直接影响到连续变焦成像质量和光轴一致性。凸轮的导程与直径是设计变倍凸轮槽的重要参数,因此在设计变倍凸轮槽时一定要对凸轮的导程和直径进行精确计算分析。采用这种变焦机构设计方案的前提是光学设计已对热像差进行了良好校正,因为机械凸轮曲线槽不能随温度而改变。
对于残留有热像差的光学系统,采用电子凸轮是可行的技术方案,因为其决定的变倍透镜组和补偿透镜组运动轨迹可以根据温度变化而作适应性地改变。见图5所示,变倍组和补偿组两套机构轴向相对运动,它们之间的运动曲线可以根据热像仪机内温度传感器数值实时进行修正,因此称作电子凸轮。
红外连续变焦与多档变倍热像仪的最大区别在于可以实现从大视场到小视场连续变倍,并且在视场变化过程中保持图像的连续性,但光轴一致性较差,视场切换时间较慢,一般应用于对高速运动目标的搜索和跟踪。
3 间断变倍光机系统
间断变倍光机系统是在视场变换过程中,变焦机构运动是非连续的,一般只在两个或多个间断位置清晰成像。根据调焦变倍机构的不同,可以将间断变倍光机系统分为径向变倍光机系统、轴向变倍光机系统及两者复合的变倍光机系统。

图3 机械补偿连续变焦光机系统原理图

图4 机械补偿连续变焦光机系统圆柱凸轮结构示意图

图5 机械补偿连续变焦光机系统电子凸轮设计方案示意图
3.1 径向变倍光机系统
径向变倍光机系统的特点是根据需要将不同的透镜组切入切出以实现视场切换,如图6所示。多视场红外光机系统在设计时通常是把小视场作为产品的设计基础,以确定热像仪作用距离,及其大概的外形包络和重量。然后根据不同视场变化的需求设计出相应的大/中变倍透镜组,在进行视场变换时,根据需要将相应透镜组切入到小视场光学系统中,从而组成一个新的光学视场,如中视场、大视场。其变倍机构的设计应满足切换时间短、定位准确、结构稳定性好、没有机械干涉和光路遮挡等要求。采用径向变倍光机系统,尽量减少每个视场中透镜的数量,可将不参与成像的透镜暂时移出光路,能够明显提高红外光学系统的透过率。根据变倍透镜组切入和切出光路的运动方式不同,可将径向变倍光机系统分为旋转式切换机构和平移式切换机构2种形式。
旋转式切换变倍机构有一个垂直于光轴并与之相交的回转轴,回转轴转动以带动不同的透镜组切入/切出光路,实现不同视场间的切换(变倍)。旋转切换式变倍机构在双视场变倍光机系统中较为常见,但多视场红外光机系统的切换很少有采用这种方式的,因为该方案光学系统设计较容易,但机构的设计难度较大,而且光轴一致性难以满足设计要求,不利于减量化设计。
目前,常用旋转驱动方式主要有以下2种构型:
1)力矩电机直接驱动方式。使用这种旋转切换方式要求不同的变倍透镜组全部固定在同一个结构框架上,旋转轴系是框架的几何中心,力矩电机直接套装在旋转轴系的一端,位置传感器在轴系的另一端。这种形式的变倍机构设计装调相对简单,且控制精度较高,它只需要占用较少的轴向空间和径向空间。
2)伺服电机间接驱动方式。这种间接驱动方式的变倍机构,每一个变倍透镜组都有自己的支撑框架、驱动电机、传动机构、位置传感器、限位装置等零部件,不同的变倍透镜组间相互独立。根据热像仪内部光机结构的布局不同,可以采用齿轮传动或钢带传动,选择合适的伺服电机带动齿轮或钢带实现从一个视场到另一个视场的切换。这种驱动方式结构比较复杂,需要较多的零部件,装调也较复杂,对空间有较大要求。平移式切换变倍机构是通过将变倍透镜组沿着垂直光轴的方向平移,实现变倍透镜组切入/切出光路功能,完成不同视场间的切换。
图7是一款典型的平移式切换变倍光机系统,当需要进行视场变换时,大或中视场透镜组沿着图中所示的变倍透镜组移动路线平移切入/切出光路,完成视场变换。这种平移式切换变倍机构通常包括变倍透镜组、结构支撑零件、精密轴承、导轨滑块、高精度滚珠丝杠和螺母、驱动电机、位置传感器、限位装置等。当需要进行视场切换时,控制系统向驱动电机发送信号指令,驱动电机带动滚珠丝杠转动,丝杠螺母把电机的回转运动转化为直线运动,最后丝杠螺母带动变倍透镜组沿着导轨移动,实现不同视场间的平移切换。

图6 径向变倍光机系统原理图
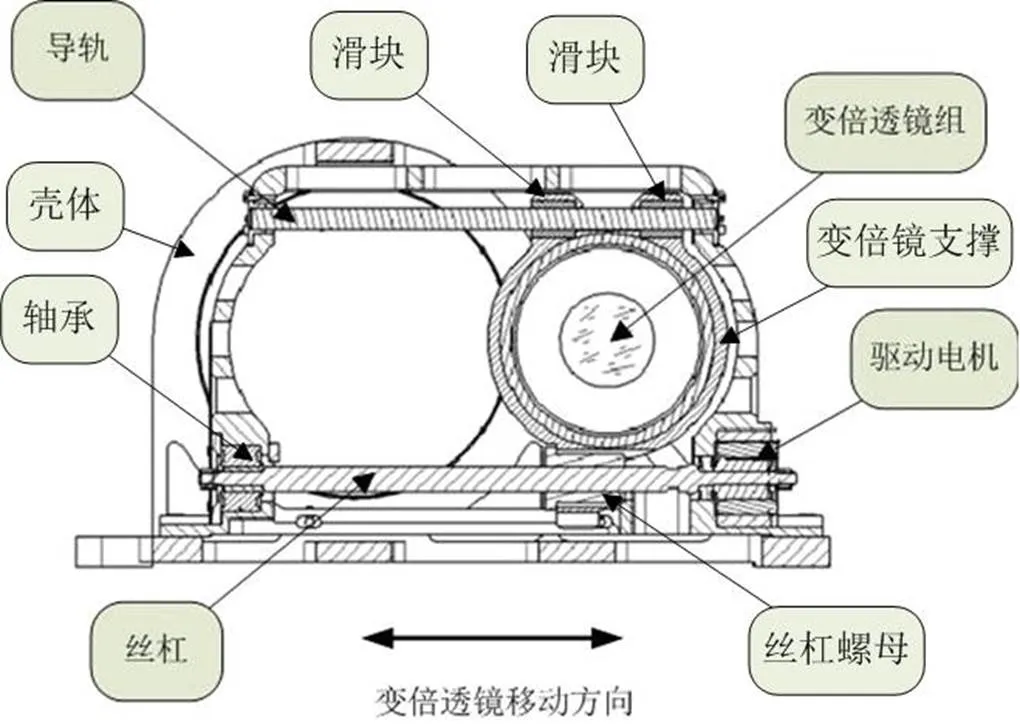
图7 平移式切换变倍机构
在进行径向变倍光机系统结构设计时,应充分考虑以下几个方面的问题:首先,当变倍机构进行视场变换时,变倍透镜组要能快速准确的切换到位,且重复定位精度高,能充分保证热像仪的成像质量和光轴的一致性,这就要求变倍机构具有较高的结构稳定性,精确的定位和限位功能。其次,当变倍透镜组运动到指定位置后,为了保证系统能在冲击、振动、高低温等恶劣的环境条件下正常工作,在结构设计应当考虑设计锁定装置,防止由于外界变化使变倍透镜组位置出现变动,影响热像仪的正常使用。再次,为满足中/大变倍透镜组与热像仪小视场光学系统的同轴度和视场误差的要求,变倍机构中必须预留工艺调整环节。最后,为提高变倍透镜组的结构稳定精度,变倍机构在设计和装调过程中必须进行精确配平。
旋转式切换变倍机构和平移式切换变倍机构相比,前者所需要的轴向和径向空间较小,结构相对紧凑,但结构形式比较单一,光机系统的装调相对简单,但系统工作一段时间后,变倍透镜组光轴与热像仪整机光轴的同轴度下降较为严重,一定程度上影响产品可靠性。文献[11]介绍的就是一种通过切换变倍透镜组实现视场转换的方案。平移式切换变倍机构所占径向尺寸较大,结构型式比较灵活,光机系统的装调相对困难,变倍机构在工作过程中,变倍透镜组的光轴与光学系统的光轴不易产生偏离,能够保证产品可靠性。
3.2 轴向变倍光机系统
轴向变倍机构的特点是变倍透镜组沿光学系统的光轴移动实现视场切换,这是目前最为常用的调焦变倍技术方案,如图8所示。变倍透镜组移动到不同的位置形成一个不同的光学视场。轴向变倍光学系统的设计难度较大,但轴向变倍机构的设计难度较小,装调工艺比较复杂,容易保证良好的光轴一致性,径向尺寸紧凑,但需要适当增加轴向尺寸。由于参与成像的透镜数目较多,光学系统的透过率相对降低,加之材料均匀性和镀膜均匀性随口径有所变化,尤其对热像仪小视场的热灵敏度有一定的影响。

图8 光学补偿轴向变倍光机系统原理图
轴向变倍机构在双视场或多视场光机系统中很常用,其变倍机构与平移式切换变倍机构的结构形式相似,只不过是变倍镜组移动方向变为沿光轴方向,通过变倍透镜组和补偿透镜组同时沿光轴方向移动,停靠在预定位置以实现视场切换。
图9为三视场长波红外热像仪光学补偿变倍机构的三维设计图,图中,调焦变倍机构是沿光轴移动实现视场切换功能,它包括变倍透镜组、补偿透镜组、结构支撑零件、精密轴承、导轨滑块、高精度滚珠丝杠和螺母、驱动电机、位置传感器、限位装置等零部件。其中变倍透镜组和补偿透镜组由一个U形变倍架固联,整个热像仪的调焦变倍只用1套运动机构。当进行视场切换时,控制电路向驱动电机发送控制信号,驱动电机带动滚珠丝杠转动,丝杠螺母把电机的回转运动转化为直线运动,最后丝杠螺母带动变倍透镜组沿着导轨移动,导轨的安装方向平行于光学系统光轴,由此实现不同视场间的切换和调焦功能。

图9 三视场热像仪光学补偿变倍机构三维设计图
事实上,图3中的机械补偿红外连续变倍光机系统也属于轴向变倍方式,如果简化设计,该方案也能实现多视场间断轴向变倍光机系统。图7中的光学补偿多视场间断轴向变倍光机系统如果完善设计,也能够实现连续变倍,见参考文献[12]。如果简单轴向移动1个透镜组,一般只能够获得双视场[13]。在二次成像方案中,轴向变倍光机系统一般设计在物镜组部位;但在文献[14]中,轴向变倍机构从中继组跨渡到了物镜组部位。轴向变倍技术方案比较易于兼顾热像仪作用距离、小型化、轻量化和光轴一致性等设计指标,一般适用于高性能多功能的观瞄型热像仪。
3.3 径向与轴向变倍复合的光机系统
随着红外热成像技术的不断发展,用户对热像仪的作用距离和光轴一致性提出了越来越高的要求。能根本上提高热像仪作用距离的技术途径只有2个:增大光学系统的长焦距,或提高探测器的面阵规模并减小其像元间距。而显著提高小视场光轴稳定性的技术途径是小视场没有任何运动部件。
为实现上述设计目标,提出了一种新的光机系统设计方法,即多视场之间的视场切换采用了径向和轴向变倍复合的光机系统方案,或者称为“双通道光机系统”,如图10所示。小视场没有任何运动部件。旋转切入反射镜M,转换为中/大视场光学通道;轴向移动中/大视场调焦变倍透镜组,可实现中/大视场转换及其调焦。由于小视场的焦距较长,为了尽可能减小热像仪外形尺寸,可采用立体三次折叠光路的技术措施[15]。整个热像仪只用2套调焦变倍机构,有利于减小外形尺寸和重量,提高可靠性。

图10 双通道光机系统原理图
这种设计方案还有利于减少小视场的透镜数量,保证小视场光学系统的透过率,并能显著缩短中/大视场的调焦变倍机构的轴向行程,从而有效保证小视场光轴稳定性和三视场间的光轴平行性。这种热像仪的两套变倍机构类似,主要包括变倍透镜组(或反射镜组)、结构支撑零件、精密轴承、导轨滑块、高精度滚珠丝杠和螺母、驱动电机、位置传感器、限位装置等零件。当需要进行视场切换时,控制系统向目标驱动电机发送控制指令,目标驱动电机带动滚珠丝杠转动,丝杠螺母把电机的回转运动转化为直线运动,最后丝杠螺母带动变倍透镜组(或光路切换平面反射镜)沿着导轨移动,实现不同视场间的平移切换。图11所示为一个长焦距三视场复合变倍热像仪的轴向和径向变倍机构三维设计图。这种方案适用于机载长焦距小型化高性能观瞄热像仪。
4 多视场热像仪变倍机构设计的主要原则
多视场热像仪变倍机构设计的主要原则为:
1)实现多视场变换功能,并保证各视场图像质量、光轴精度和可靠性。
2)尽可能减少变倍光机系统的数量,并进行小型化和轻量化优化设计。

图11 三视场热像仪的径向(a)和轴向(b)变倍机构三维设计图
3)在具体设计中,应避免结构干涉、光路遮挡和引入杂散光。
4)在设计时,就应该考虑机械零件的加工工艺性和装调工艺方案。
5)如果采用新的变倍机构或电机,应根据使用环境要求提前进行相关技术验证。
6)热像仪多视场变倍机构的设计力求简化、实用和可靠。复杂的多视场红外光学设计结果,必然导致复杂的结构和控制电路设计结果,其结果往往技术难点堆积、可靠性和批生产性较差。
7)不同的多视场热像仪变倍机构型式所涉及的光学、结构和控制电路的技术难度不一样,可以根据项目团队各专业的技术力量作合理的方案调整和难度转化。最终目的是研制出合格的热像仪产品。
5 结论
红外热像仪的变倍机构型式多种多样,不同的视场切换方式有不同的实现途径、技术优缺点和适用性。应根据项目设计技术要求和用户使用要求,选择合理可行的多视场热像仪变倍光机系统方案。在具体的结构设计中,主要针对光学系统视场变换的特点及空间尺寸的限制条件选择合适的变倍机构型式开展结构设计。一般径向变倍和轴向变倍光机系统已经使用比较普遍,径向和轴向变倍复合的光机系统使用还比较少见。因为有些复合方式采取把大视场分离出来作为一个成像通道,而把小/中视场组合为一个成像通道,则所获得的应用效果会很有限。总之,在多视场热像仪设计中应该遵循一定的设计原则,优化设计过程就是不断完善设计的过程,优秀的变倍光机系统设计不能顾此失彼。
[1] 杨为锦, 孙强. 中波红外连续变焦系统设计[J]. 中国光学, 2010, 3(2): 164-169.
YANG Wei-jin,Sun Qiang.Design of middle infrared continuous zoom system[J]., 2010, 3(2): 164-169.
[2] 尹娜, 孟庆超, 齐雁龙, 等. 中波红外连续变焦光学系统设计[J]. 红外技术, 2009, 31(12): 694-697.
YIN Na,MENG Qing-chao,QI Yan-long, et al. Middle infrared continuous zoom optical system[J]., 2009, 31(12): 694-697.
[3] 李岩, 张葆, 洪永丰.大变倍比中波红外变焦光学系统设计[J]. 光学学报, 2013, 33(4): 0422005-1-0422005-6.
LI Yan,Zhang Bao,Hong Yongfeng. Design of Large Zoom Ratio Middle Wavelength Infrared Zoom Optical System[J]., 2013, 33(4): 0422005-1-0422005-6.
[4] 杨立保. 中波红外系统两档变倍机构的研究[J]. 长春理工大学学报:自然科学版, 2013, 36(6): 36-38.
YANG Libao. Study on zoom mechanism of medium wave infrared system[J]., 2013, 36(6): 36-38.
[5] 兰翔. 变焦距系统的研究与设计[D]. 大连: 大连理工大学, 2011.
LAN Xiang. Study and Design of Zoom System[D]. Dalian: Dalian University of Technonogy, 2011.
[6] 王一凡, 薛育. 一种大口径高精度凸轮变焦机构的设计[J]. 光学精密工程, 2007, 15(11): 1756-1759.
WANG Yifan, XUE Yu. Design of heavy calibre and high precision cam-varifocal mechanism[J]., 2007, 15(11): 1756-1759.
[7] 李永刚, 张葆, 丁金伟. 红外连续变焦镜头的结构设计[J]. 长春理工大学学报:自然科学版, 2009, 32(1):60-63.
LI Yonggang, ZHANG Bao, DING Jinwei. Mechanism design of continuous infrared zoom lens [J]., 2009, 32(1):60-63.
[8] 刘峰, 徐熙平, 孙向阳, 等. 高变倍比红外变焦距光学系统设计[J]. 应用光学, 2009, 30(6): 1020-1023.
LIU Feng, XU Xiping, SUN Xiangyang, et al. Design of high zoom ratio thermal infrared zoom optical system[J]., 2009, 30(6): 1020-1023.
[9] 姜凯, 周泗忠, 王艳彬, 等. 30×中波红外连续变焦光学系统设计[J]. 红外与激光工程, 2012, 41(8): 2162-2166.
JIANG Kai, ZHOU Sizhong, WANG Yanbin, et al. Design of 30×middle infrared continuous zoom system[J]., 2012, 41(8): 2162-2166.
[10] 王海涛, 耿安兵, 杨长城. 切换变倍光学系统设计[J]. 光学学报, 2010, 30(3): 872-875.
WANG Haitao, GENG Anbing, YANG Changcheng. Design of Rotate-in-Group Zoom Optical System[J]., 2010, 30(3): 872-875.
[11] 李刚, 杨晓许, 张恒金, 等. 基于卡塞格林系统的红外制冷型长焦分档变倍光学系统的设计[J]. 中国光学, 2014, 7(2): 293-300.
LI Gang, YANG Xiaoxu, ZHANG Hengjin, et al. Design of cooled infrared switch-zoom optical system with long effect focus length based on R-C system[J]., 2014, 7(2): 293-300.
[12] 陶亮, 赵劲松. 5×光学补偿长波红外连续变焦物镜系统[J]. 红外技术, 2008, 30(4): 210-213.
TAO Liang, ZHAO Jin-song. Optically compensated LWIR zoom objective with magnification of 5×[J]., 2008, 30(4): 210-213.
[13] 束慧琴, 窦建云, 曹凌, 等. 主动式温度自适应技术在非制冷热像仪光学系统中的应用[J]. 红外技术, 2013, 35(10): 612-616.
SHU Hui-qin, DOU Jian-yun, CAO Lin, et al. Application of active-athermal compensation to uncooled IR imaging sensor system[J]., 2013, 35(10): 612-616.
[14] Olivier Cocle, Christophe Rannou, Bertrand Forestier, et al. QWIP compact thermal imager: Catherine-XP and its evolutions[C]//, 2007, 6542: 654234-1-654234-12.
[15] 陈津津, 赵劲松. 一种紧凑型折射式红外搜索/跟踪光学系统设计[J]. 红外技术, 2008, 30(5): 279-282.
CHEN Jin-jin, ZHAO Jin-song. A compact MWIR objective for infrared search/tracking system[J]., 2008, 30(5): 279-282.
Study on Zoom Mechanisms of Thermal Imagers
ZHANG Wei-feng,ZHAO Jin-song,SHI Yan-li,TAO Liang,KANG Li-zhu,HE Hong-xing,TANG Han,XU Can-jun,ZHENG Chuan-wu,ZHAO Qiang
(,650223,)
Technologies in zoom mechanism design for thermal imagers are studied in this paper. For multiple field-of-view thermal imagers, principle and feature of several zoom mechanisms are presented respectively. Furthermore, the main fundamentals in the mechanical design are concluded.
multiple field-of-view thermal imager,zoom mechanism,optical-mechanical system
TH702
A
1001-8891(2015)12-0993-06
2015-11-16;
2015-12-02.
张卫锋(1978-),男,博士研究生,高级工程师。主要研究方向为结构设计和热像仪总体设计技术、热像仪测试技术。
赵劲松(1972-),男,博士,研高工。主要研究方向为红外光学和热像仪总体设计技术、红外光学及热像仪测试技术。
云南省重点项目,编号:2015FA040。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
中国交通信息化(2022年12期)2022-02-11
花火·绘阅读(2021年2期)2021-09-10
摄影之友(2020年12期)2020-12-23
雪豆月读·高年级(2020年7期)2020-09-10
儿童时代·快乐苗苗(2018年6期)2018-09-03
现代兵器(2016年10期)2016-10-26
红外技术(2016年6期)2016-03-15
现代食品(2015年16期)2015-12-20
应用光学(2014年3期)2014-06-01
