数字水准仪应用中的条码图像匹配识别算法
2015-04-20 02:43李延海李星全乔夏菲
测绘科学与工程 2015年4期
李延海,李星全,申 晋,乔夏菲
测绘信息技术总站,陕西 西安,710054
数字水准仪应用中的条码图像匹配识别算法
李延海,李星全,申 晋,乔夏菲
测绘信息技术总站,陕西 西安,710054
在数字水准仪条码标尺定位测量中,标尺条码图像的准确识别是实现水准测量的前提。远距离条码图像严重模糊,直接利用边缘检测条码识别的方法失效。本文通过频域物像比求解,利用相对稳定的实测条码条空重心位置与理想光学成像条码中心位置进行匹配,提出了条码图像亚像素匹配识别新算法,有效避免了高空间频率下信号降晰带来的边缘识别难题。实验表明:本文算法具有较强的抗模糊和抗噪声能力,实现了视距70m的正确水准测量,达到了较高的测量精度。
数字水准仪;条码标尺;图像匹配;水准测量
1 引 言
数字水准仪作为高精度几何水准测量的核心仪器,是集光电技术、图像处理技术和计算机技术为一体的高科技测绘仪器。它以条码标尺取代传统的刻线标尺,以CCD取代肉眼观测,通过算法进行条码识别,完成了高度和视距的自动读数,实现了水准测量自动化。数字水准仪在大地测绘、水利建设、工程施工等各个领域中有着广泛的应用,起着至关重要的作用[1]。条码识别技术是数字水准仪实现自动读数的关键,是数字水准仪生产中的技术瓶颈。水准测量时,仪器和条码标尺是分离的,随着测量视距的加大,条码密度随之增加,视距变化从几米至几百米,条码成像的尺度也随之大范围变化;加之大气折射、环境光线等诸多因素的影响,图像传感器采集到的条码图像退化严重,不但边缘模糊不清,而且相邻边缘的相互叠加使得条码信号的边缘出现偏移,条码识别的难度大大增加[2]。如果直接利用边缘检测方法进行条码识别会出现很大的误差,甚至失效,根本无法完全满足高精度水准测量的需求[3]。因此,研究水准仪条码标尺识别算法关键技术,对加快高精度数字水准仪产品的国产化进程,推动测绘仪器的数字化和自动化发展必将具有十分重要的意义。
2 条码图像匹配识别算法概述
目前,国产数字水准仪采用比较成熟和常用的方法是边缘检测法,但由于受制于边缘难以识别的问题,其在测量精度、识别稳定性和对环境的适应能力方面与进口高精度水准仪还存在着一定的差距。为此,本文研究提出了基于条码图像匹配的识别算法,用理想条码条空的中心点与实测条码重心点进行位置匹配,有效避免了边缘识别的难题,达到了亚像素的定位精度,提高了条码的识别稳定性和对环境的适应能力,使有效测程达70m,测量精度达到每公里往返标准差优于0.5mm,满足了高精度水准测量的需求。
在数字水准仪的水准测量中,由于CCD的条码成像是多尺度的,若实现条码标尺理想图像和CCD实测条码图像的匹配,则必须先求解出物象比,将条码标尺图像按物像比缩放至与CCD实测条码相同的尺度,计算出理想条码图像的条空中点位置;然后计算出实测条码的条空重心位置,将两者进行位置匹配,完成标尺高度的粗定位值;最后,由每个条码的粗定位高度计算其对应到视准轴的高度及标尺高度的精定位值,完成数字水准仪的高度读数,其流程如图1所示。
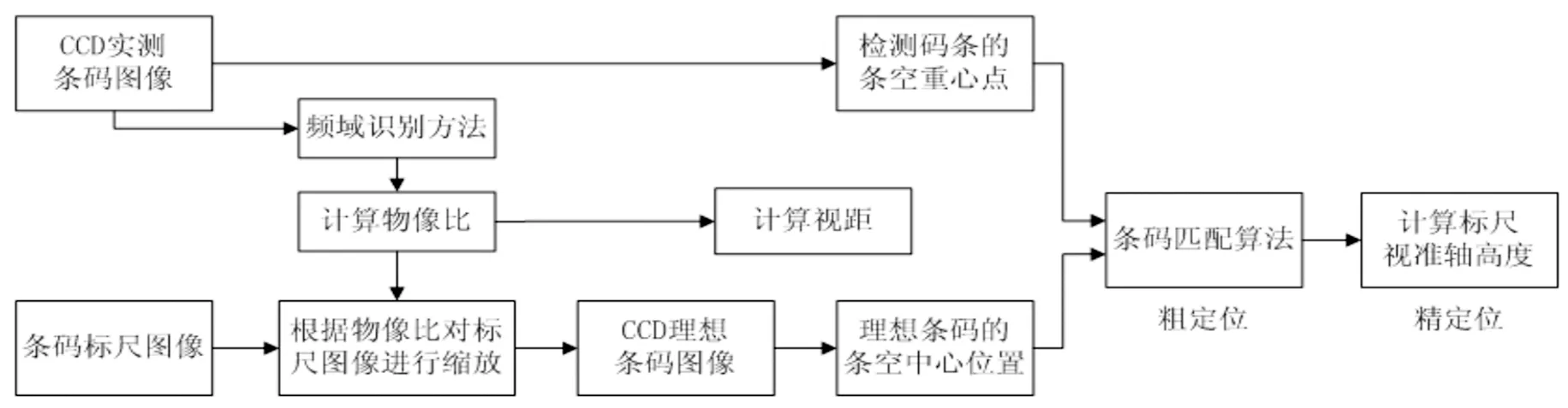
图1 条码图像匹配识别算法流程图
3 物像比求解
数字水准仪的条码编码大多为周期性条码,利用其频率特性,在频域用傅里叶变换检测条码信号的频率[4],通过CCD实测条码信号的特征谱线求解物像比。
像素点为N的条码图像信号序列s(n)的离散傅里叶变换为:
(1)
式中,k为信号序列的特征谱线号,若其采样频率为ωS,则信号序列对应的空间频率ω为:ω=kωs/N。
假设码条间距为ΔL,物像比为d,则通过光学系统在CCD像平面上成像的码条间距为ΔL/d,其条码信号对应的基频值ω0为:
ω0=2πd/ΔL
(2)
若CCD的像素宽度为μ,则采样频率ωs为:ωs=2π/u.
由式1进行CCD条码信号离散傅里叶变换,若检测到特征谱线号为k0,则条码信号的物理频率为:
(3)
由式2和3,即可求得物像比:
(4)
4 条码条空重心点计算
若数字水准仪实际条码标尺的波谷中心位置为Lt,通过物像比缩放后,则CCD理想条码信号的波谷中心点位置lt为:
lt(i)=Lt(i)/(d·μ)=i·ΔL/(d·μ)
(5)
波峰中心点位置lp为:
CCD成像实测条码由于光学系统的模糊作用和相邻条码的相互作用,其波峰波谷中心点位置并非其区间极大值和极小值点。通过实验分析,波峰波谷区间的重心位置与其最为接近,因此,采用条空重心法计算实测条码的峰谷中心点位置[5]。若取波峰或波谷区间为[a,b],则计算区间[a,b]内所有点的加权平均值,即可得到准确的条码信号的波峰波谷的亚像素重心位置 :
(7)
通过条空重心法检测到实测条码信号的波峰波谷点位置如图2所示:
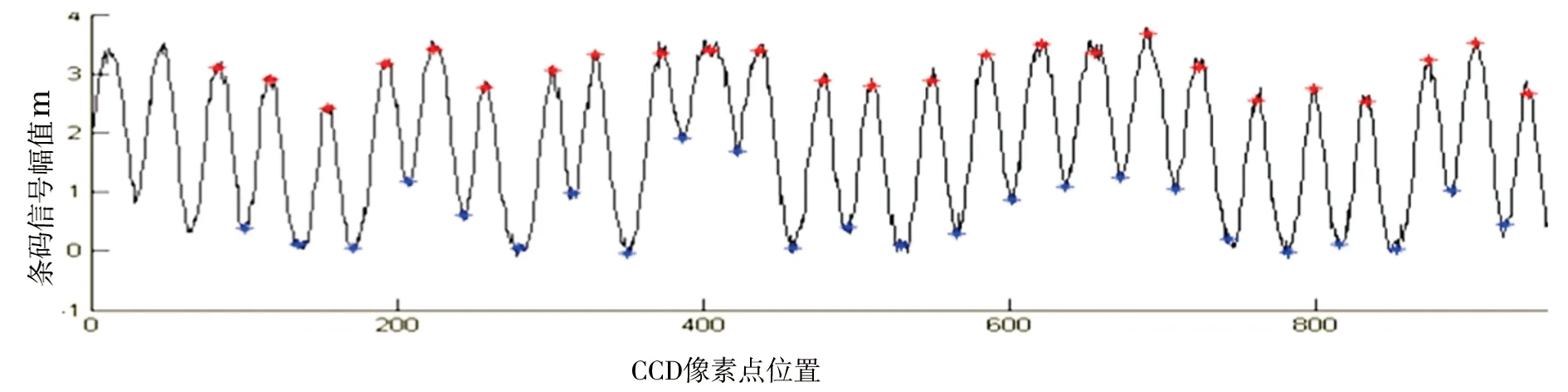
图2 计算得到的实测条码条空重心位置
5 条码图像匹配
条码标尺是由一系列宽度不同的码条按一定的编码规则排列组成,当两个相邻条码(黑色区域)宽度不同时,相应的条码间白色区域的位置会发生变化,其中点位置(波峰位置)也会相应变化。如图3所示:
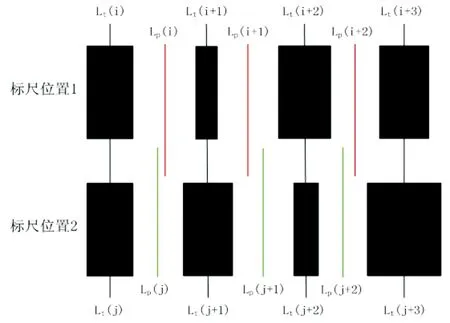
图3 理想条码条空中心位置示意图
当相邻两条码宽度相同时,其波峰位置Lp(i)与Lp(j)相重合;反之,其波峰位置Lp(i+1)、Lp(i+2)与Lp(j+1)、Lp(j+2) 就存在差值。利用这一特性,通过计算实测信号中的所有条码与相同长度CCD成像的理想条码信号的方差和,即可确定两段条码的匹配程度。
假设实测信号共检测到M个波谷点(即M个条码),波谷点和波峰点分别为st和sp,整个条码标尺共有N个条码。若理想CCD条码信号的波谷点和波峰点分别为lt和lp,则从整个条码标尺的第1个到第N-M个条码的方差和,用匹配误差E表示为:
(8)
其中,i=0,1,2,…,N-M-1。
当实测条码信号与CCD理想条码信号处在同一高度时,即其两段条码内的所有码条宽度相同时,其匹配误差E(i)达到最小值Emin:
Emin=min[E(i)]i=0,1,2,…,N-M-1
(9)
理论上,若实测信号的所有波谷和相邻两波峰的距离差与理想信号的波谷和相邻两波峰的距离差完全相同时,即条码宽度完全一致时,其方差和为零;但在实际测量中,由于信号噪声、物像比计算误差等因素的影响,得到的实测信号峰谷重心点位置和理想信号的条空中点位置都会产生细微的误差,因而其方差和不可能为零。但方差和越小,则实测信号的所有条码宽度与此段理想信号对应的条码宽度越接近,即CCD采集到的条码和理想条码处于同一段编码区域,亦即处于标尺的同一高度。
将CCD实测条码信号与理想信号按式8算法进行匹配,得到实测条码信号的匹配误差E(i),如图4所示:
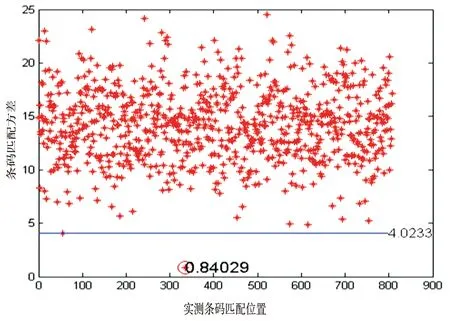
图4 条码匹配误差E(i)分布
由上图可以看出,当实测条码信号与CCD理想条码信号处在同一高度时,其匹配误差E(i)达到最小值(Emin=0.84),当其中有个别或部分条码宽度不同时,其匹配误差大大增加。匹配误差E(i)的次小值为4.02,远远大于Emin。因此,依据最佳匹配位置的CCD理想条码信号的高度值,可求得实测条码信号的高度粗值h(i)。
若CCD对应于视准轴的像素位置为P,物像比为d,CCD像素大小为μ,则每一个条码对应的视准轴的标尺高度精读数H(i):
H(i)=h(i)+(st(i)-P)·d·μi=0,1,2,…,M-1
(10)
(11)
6 水准测量实验结果
水准测量实验时,利用螺旋测微器(最小分度值为 0.01mm)调节条码标尺的垂直高度,用本文算法对条码标尺图像进行识别和计算,每次将标尺上升ΔH=2.00mm,分别在视距L为30m、50m和70m各进行8次水准测量,计算出水准读数h (数字水准仪水平视线对应于条码标尺的高度),水准测量实验结果如表1所示:
表1 水准测量实验结果

L=30mL=50mL=70m测量次数读数值h/mm高差△h/mm读数值h/mm高差△h/mm读数值h/mm高差△h/mm1763.851034.37936.212765.831.981036.432.06938.011.803767.882.051038.351.92939.871.864769.892.011040.362.01942.032.165771.942.051042.442.08944.122.096773.911.971044.492.05945.981.867775.871.961046.421.93947.931.958777.851.981048.512.09949.721.79平均值2.002.021.93标准差0.030.070.15
从水准测量实验结果可以看出,当视距为30m时,最大误差为0.05mm,标准偏差为0.03mm;当视距为50m时,最大误差为0.09mm,标准偏差为0.07mm;当视距为70m时,最大误差为0.21mm,标准偏差为0.15mm。该方法具有较好的稳定性,达到了较高的测量精度。
7 结 论
在数字水准仪测量中,由于在中远距离测量时条码空间频率很高,加之光学系统的模糊作用,以及环境光线、噪声等诸多因素的影响,图像传感器采集到的条码图像退化严重,增加了条码识别的难度,从而限制了水准仪的测程和测量精度。将本文算法应用于数字水准仪的水准测量实验,实现了70m视距的准确识别和读数,具有较好的稳定性,达到了较高的测量精度,完全能够满足通用水准测量的需求,对提高数字水准仪的精度和测量视距范围有较大的实用价值。
[1]杨俊志,刘宗泉.数字水准仪的测量原理及其检定[M].北京:测绘出版社,2005.
[2]姜文龙.电子水准仪在精密水准测量中的应用[C].第十三届华东六省一市测绘学会学术交流会论文集,2011.
[3]安岗.CCD光学成像系统的点扩散函数及其在亚像素边缘定位中的应用[D].长春:吉林大学,2008.
[4] Selim Esedoglu. Blind deconvolution of bar code signals[J].Inverse Problems,2004(1):121-135.
[5]甘岚, 刘宁钟.基于亚像素边缘检测的二维条码识别[J].计算机工程,2003,29(22):155-157.
Barcode Image Matching Recognition Algorithm in Application of Digital Levels
Li Yanhai,Li Xingquan,Shen Jin,Qiao Xiafei
Technical Division of Surveying and Mapping,Xi’an 710054, China
The accurate recognition of bar code image is the precondition for level measurement in the digital leveling with a barcode ruler. The direct edge detection method fails to detect barcode correctly when the stadia is long. The paper puts forward a new barcode image subpixel matching algorithm through getting the ratio of objects and frequency domain image and using the relatively stable bar-space barycenter position to match the ideal optical imaging barcode center. The algorithm effectively avoids the edge recognition problem caused by high spatial frequency. The experiment shows that the algorithm has a strong resistance to blur and noise immunity, the stadia measuring range is up to 70m and the level measurement achieves a high accuracy.
digital levels; barcode ruler; image matching; level measurement
2015-04-27。
李延海(1976—),男,工程师,主要从事装备技术与仪器专业方面的研究。
P
A
猜你喜欢
石家庄铁道大学学报(自然科学版)(2021年4期)2021-12-07
仪器仪表用户(2020年11期)2020-11-12
东坡赤壁诗词(2020年5期)2020-11-06
科学咨询(2020年43期)2020-03-04
上海计量测试(2019年5期)2019-11-04
新传奇(2019年15期)2019-09-06
新商务周刊(2018年7期)2018-12-08
神州·下旬刊(2018年2期)2018-03-11
——可看得见的权利
太原学院学报(社会科学版)(2018年6期)2018-01-23
计算机应用(2016年5期)2016-05-14