水下潜器导管螺旋桨在转艏摆动中的推力特性分析*
2015-04-21 02:56吴家鸣叶志坚金晓东张城玮徐灜
华南理工大学学报(自然科学版) 2015年12期
吴家鸣 叶志坚 金晓东 张城玮 徐灜
(华南理工大学 土木与交通学院, 广东 广州 510640)
水下潜器导管螺旋桨在转艏摆动中的推力特性分析*
吴家鸣 叶志坚 金晓东 张城玮 徐灜
(华南理工大学 土木与交通学院, 广东 广州 510640)
采用多重滑移网格技术和计算流体力学(CFD)方法对作为水下潜器主要控制机构的导管螺旋桨在水下潜器各子系统流场影响下作转艏摆动时的推进特性进行数值模拟,研究了潜器组合体流场对导管螺旋桨所发出的推力的影响,对水下潜器系统中导管螺旋桨在其转艏摆动中的所发出的推力的规律进行了总结,并分析了水下潜器组合体与导管螺旋桨的水动力相互影响因素.计算结果表明:水下潜器组合体流场对导管螺旋桨的推进特性有不可忽略的影响,其中导管螺旋桨前端的鱼雷状浮体是影响其推进特性的主要因素,在其水动力相互影响区域长度范围内,浮体与螺旋桨之间轴向距离越小,螺旋桨所发出的推进力越大;鱼雷状浮体对导管螺旋桨推进特性的影响主要是通过改变螺旋桨盘面处的进速来体现.在研究水下潜器系统中导管螺旋桨推进力特性时,只有将潜器组合体与所研究的导管螺旋桨组合成为一个整体、同时将这样一个组合整体结合到水下潜器系统具体的运转环境来进行计算才能得到一种符合工程实际的结果.
导管螺旋桨;水下潜器;计算流体动力学;水动力学;转艏摆动
作为一种水下探测装置的搭载平台,带缆遥控水下潜器在海洋、河流与湖泊等水下环境中进行探测作业的需求越来越多.这一类水下潜器通常由潜器主体以及作为其轨迹与姿态控制装置的导管螺旋桨组成,水面操作人员可以通过脐带缆对水下潜器发出动力与控制信号来操纵特定的控制螺旋桨的动作来对其实施控制[1- 4].在水下潜器作业过程中,由于其中的导管螺旋桨处于潜器主体流场的干扰下工作,如何正确地确定水下潜器所使用的导管螺旋桨在特定的运动状态下的推力特性,对于准确地了解在螺旋桨控制动作下水下潜器的运动与控制特性具有重要的意义.目前在对水下潜器系统中导管螺旋桨水动力计算,往往忽略水下潜器主体的影响,或者停留在仅仅分析在定常条件的单一方向来流下螺旋桨所产生的推力、转矩等水动力特性[5- 7].文献[8]中,基于样机试验结果以神经网络理论建立了水下潜器系统中普通螺旋桨所发出的操纵动作与水下潜器运动轨迹之间关系的数学模型.显然,这种数学模型只适用于特定的实验结果与特定的螺旋桨.对于导管螺旋桨在运动中的水下潜器主体流场影响下螺旋桨所发出的推力,尤其是在水下潜器运动过程中在其他机构流场影响下推力的变化关注较少.
文献[9]中曾经对水下潜器系统中导管螺旋桨在潜器主体流场影响下的推力特性开展了研究.在该论文中,作者通过数值模拟计算分析了在定常条件下潜器轴线与潜器运动方向呈一定夹角情况下潜器主体流场对螺旋桨推力的影响.结果表明:水下潜器流场对导管螺旋桨推力特性不可忽略的影响;相对于潜器主体的不同位置螺旋桨和水下潜器不同的运动方向,螺旋桨表现出了与敞水螺旋桨相异的推力特性.但是,由于这一计算方法是以定常手段来计算的,导管螺旋桨在水下潜器系统非定常运动过程中由于惯性力所造成的推力影响因素并没有计及.随着对水下潜器系统使用功能要求的提高,人们对水下潜器系统在其运动过程中导管螺旋桨推力特性准确预测的需求也在增加,更加客观地预测水下潜器系统在其主体流场影响下同时在非定常运动过程中的导管螺旋桨推力特性已经成为设计控制性能优良的水下潜器的其中一个关键因素.
文中以数值模拟的方法对作为水下潜器的主要控制机构的导管螺旋桨在水下潜器各子系统流场影响下作非定常转艏摆动时的推进特性进行研究,对比分析了潜器潜器组合体流场对导管螺旋桨所发出的推力的影响,对水下潜器系统中导管螺旋桨在其非定常运动中的所发出的推力规律进行观察.据此了解非定常运动中的水下潜器组合体流场对导管螺旋桨推力的影响,对在这样的一种以水下潜器组合体与导管螺旋桨构成的水下潜器系统中组合体与导管螺旋桨的相互影响因素进行分析.首先构建水下潜器组合体+导管螺旋桨的三维模型,然后利用多重滑移网格技术以计算流体力学方法对导管螺旋桨和水下潜器组合体所在的计算域内求解N-S方程,以此模拟在水下潜器系统转艏摆动过程中导管螺旋桨所发出的推力以及由此而引发的一些水动力现象,从中分析在这样一种运动状态下,水下潜器系统中导管螺旋桨的推力特性.
1 数学模型及计算方法
1.1 控制方程
计算中的流体为不可压缩流体,螺旋桨运动过程中其周围流场的控制方程[10- 11]为
连续性方程:
(1)
动量方程:

(2)


(3)


(4)
方程(1)-(4)中,ux、uy、uz为流体的速度分量,υ、ρ和p为流体运动粘性系数、流体密度和流场的压强,x、y、z为流场的空间坐标.
1.2 水下潜器主体以及导管螺旋桨几何模型的构建
文中所分析的水下潜器主体为一立式长流线型外形,主体上方设置了2个鱼雷状浮体,浮体尾部设置有控制导管螺旋桨,二浮体以及浮体与主体之间以机翼型结构连接(见图1),表1为水下潜器主体+鱼雷状浮体所组成的水下潜器组合体几何模型的基本尺度.为了对导管螺旋桨以及水下潜器组合体+导管螺旋桨所构成的水下潜器系统的水动力特性进行数值分析,需要构造导管螺旋桨、水下潜器组合体+导管螺旋桨的几何模型,在构建的过程中去掉一些对计算结果影响不大、尺寸较小的连接构件,以有利于网格的划分.文中所选取的导管螺旋桨的具体参数如表2所示.导管螺旋桨的几何建模方法和步骤可以参考文献[12],所构建的导管螺旋桨几何模型如图2所示.

图1 水下潜器组合体+导管螺旋桨的几何模型

表1 水下潜器组合体几何模型的基本尺度

表2 导管螺旋桨参数

图2 导管螺旋桨几何模型
1.3 计算域以及边界条件的确定
文中计算采用FLUENT求解器来求解水下潜器系统以及导管螺旋桨在运动过程中控制方程,在计算过程中选取标准k-ε湍流模型.采用有限体积法离散控制方程和湍流模型,文中的数值计算分别对导管螺旋桨在3种计算工况进行分析:
计算工况Ⅰ:分析单独导管螺旋桨的推力特性(图3(a));
计算工况Ⅱ:分析无水下潜器组合体影响条件下的双导管螺旋桨的推力特性(图3(b));
计算工况Ⅲ:分析在水下潜器组合体流场影响下导管螺旋桨的水动力特性(图3(c)).

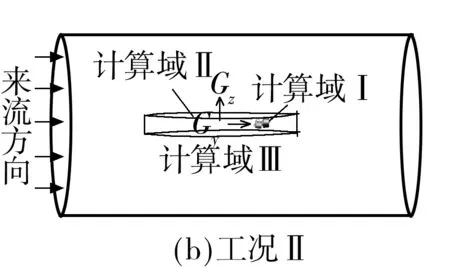

图3 计算工况使用的计算域
为进行数值分析,构造了相应的计算域.根据所研究问题的特点,分别在导管内外采用滑移网格技术来进行导管螺旋桨在不同的条件下的推力特性计 算.为进行上述3种工况的计算,构建了由3个圆柱形的子计算域相互耦合而成的组合计算域,这3个子计算域按照因不同的诱因和不同结构的影响所引起的流场来构造:
计算域Ⅰ:导管内由于螺旋桨旋转而引起的旋转流场.该计算域所包含的是以螺旋桨轴为轴心、长度等于导管长度、外周边界等于105%螺旋桨直径、旋转速度等于螺旋桨转速的圆柱形回转体旋转流场.
计算域Ⅱ:由于水下潜器组合体+导管螺旋桨构成的水下潜器系统转艏摆动引起的摆动流场.该计算域所包含以水下潜器组合体坐标垂向坐标轴为其轴线、其半径包含所计算的双导管螺旋桨或水下潜器组合体+导管螺旋桨在内的圆柱形流场.
计算域Ⅲ:包括计算域Ⅰ与计算域Ⅱ在内的外流场.计算域Ⅲ的圆柱形轴心方向与来流方向平行.对于计算工况Ⅰ,计算域Ⅲ的轴心与计算域Ⅰ的轴心重合;对于计算工况Ⅱ和计算工况Ⅲ,计算域Ⅲ的轴心通过水下潜器组合体重心、并与计算域Ⅱ的轴心垂直,来流方向与双导管螺旋桨系统在其转艏角度为零度时导管螺旋桨的轴线一致,导管螺旋桨系统转艏角的定义如图4所示.计算域Ⅲ的直径和长度依据计算精度与计算时间综合平衡结果而定,计算域过大会增加计算的时间负担,计算域过小会影响计算的精度甚至出现数值计算发散等问题.

图4 导管螺旋桨转艏角的定义
为保证子计算域Ⅰ、Ⅱ、Ⅲ之间交界面重合的部分的流场保持连续,在3个计算域之间采用界面耦合技术(Interface技术)[13- 15]将它们组合为一个整体.通过这样一种方式构成为一个整体后的组合计算域Ⅲ的外围边界即为由这3个计算域组成的组合计算域的外围边界,原计算域Ⅰ与计算域Ⅱ之间,以及计算域Ⅰ、Ⅱ与计算域Ⅲ之间的共同边界则通过Interface技术自动确定.表3给出了文中各子计算域之间的边界条件基本参数.由表3的边界条件基本参数定义可以知道,导管螺旋桨中的导管与水下潜器组合体一样,在文中的计算是作为一种运动中的固定边界来处理.
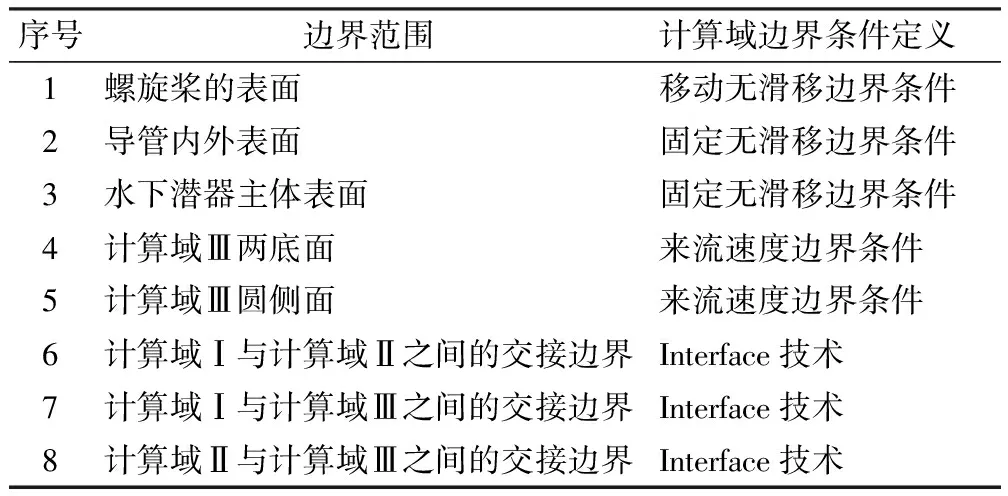
表3 各子计算域之间的边界条件 1)
1)序号7的交接边界条件在计算工况Ⅰ中使用;序号6、8的交接边界条件在计算工况Ⅱ与Ⅲ的计算中使用.
2 数值模拟和结果分析
有关采用计算流体力学方法模拟水下潜器系统中导管螺旋桨推力特性的可靠性,笔者等已经在文献[7]中通过将数值模拟计算结果与实验室导管螺旋桨模型实验结果进行对比得以证明,文中不再重复.本节利用上述所构造的水下潜器主体、导管螺旋桨几何模型和计算域对在特定的流场和水下潜器系统中作转艏摆动时,作为水下潜器轨迹与姿态控制机构的导管螺旋桨的水动力特性进行了数值模拟,观察这样一类导管螺旋桨由于潜器组合体在水下运动使螺旋桨感受到不同方向与大小的来流而产生的不同推力特性.
2.1 不考虑水下潜器组合体流场影响时导管螺旋桨转艏摆动的推力特性
一般而言,作为水下潜器轨迹与姿态控制机构的导管螺旋桨,其推力特性在一定程度上会受到水下潜器流场的影响而发生改变.为了分析水下潜器流场对导管螺旋桨推力特性的影响,本节首先对不考虑水下潜器流场影响时导管螺旋桨转艏摆动的推力特性进行数值模拟,以此与水下潜器流场影响下的导管螺旋桨推力特性进行对比.
采用计算工况Ⅱ的计算方式观察不考虑水下潜器流场影响时双导管螺旋桨转艏摆动的推力特点,所采用的计算域如图3(b)所示.在计算中,设定右导管螺旋桨正转,左导管螺旋桨反转,两个螺旋桨的转速都设为20 r/s,该双导管螺旋桨是在匀速来流速度为0.5 m/s的流场中,以幅角为30°、周期为10 s绕原水下潜器组合体坐标垂向坐标轴作转艏摆动,其转艏摆动的表达式为

(5)
式中:θ为转艏角,rad;t为时间,s.在采用图3(b)所示的计算域分析计算工况Ⅱ条件下导管螺旋桨推力特性过程中,作为计算域边界条件的来流速度其大小及方向均维持恒定,而子计算域Ⅱ则按照方程(5)所规定的方式以滑移网格技术来模拟导管螺旋桨的转艏摆动,运动中导管螺旋桨的转艏角以来流方向与水下潜器组合体纵向坐标之间的夹角来定义(如图4所示).文中,导管螺旋桨的推进力根据在导管内外采用滑移网格技术来进行导管螺旋桨在不同的转艏摆动条件下、导管及其螺旋桨表面在流场中所受的压力合力在螺旋桨轴线方向的投影来确定.
图5为根据文中的计算方法得到的右导管螺旋桨在上述匀速来流速度条件下作转艏摆动时,导管螺旋桨推力特性数值模拟的结果.由于是在左右导管螺旋桨运转过程中作转艏摆动的动态条件下计算,图中的计算结果反映了导管螺旋桨在非定常运动中所表现出的推力特征.图5中同时给出了该导管螺旋桨在定常条件下,来流方向与螺旋桨轴线成不同夹角时,螺旋桨与非定常运动相应的转艏角时的推力特征.图5中“非定常螺旋桨推力”变化曲线附近的箭头表示螺旋桨转艏摆动的方向.文中图7- 12中的箭头也表示与图5相同的含义.

图5 右导管螺旋桨作转艏摆动时的推力变化特征
通过对图5计算结果的观察可以看出:①当该双导管螺旋桨绕原水下潜器组合体坐标垂向坐标轴进行逆时针方向的转艏摆动(从-30°转艏至30°)时,所观察的右导管螺旋桨所发出的推力大小与转艏角绝对值(即双导管螺旋桨对称面和来流方向夹角的)的大小有关,转艏角的绝对值越小,右导管螺桨所发出的推力就越小,当转艏角为0°时,螺旋桨所发出的推力达到最小值.②在该双导管螺旋桨进行顺时针方向的转艏摆动(从30°转艏至-30°)的过程中,右导管螺旋桨所发出的推力几乎维持不变,其值随转艏角大小并不发生太大的改变.③双导管螺旋桨在定常和非定常条件下表现出了相异的推力特征.对于相同的转艏角,在非定常转艏摆动过程中的导管螺旋桨所发出的推力,当导管螺旋桨进行顺时针方向的转艏摆动时,要大于定常条件时导管螺旋桨所发出的推力;当进行逆时针方向的转艏摆动时,其推力特征则相反.
对图5现象发生的原因进行分析可以发现:
1)特定转艏角情形.当双导管螺旋桨在进行逆时针转艏摆动时,由于所分析的右导管螺旋桨的逆时针转艏摆动而引起了螺旋桨沿其轴线运动方向与来流方向相反(见图6),在来流与逆时针转艏摆动耦合作用下,使螺旋桨盘面处所感受的进速要比进行顺时针转艏摆动时要大.由于螺旋桨转速不变,此时水流在盘面处的合速度与桨叶切面之间形成了较小的攻角.而当顺时针转艏摆动时,情况则相反.因此,对于相同的转艏角,逆时针摆动过程中右导管螺旋桨所发出的推力要小于顺时针摆动时的推力.

图6 转艏摆动中右导管螺旋桨轴向运动趋势
2)特定方向转艏摆动情形.图7给出的是与图5相同的转艏摆动状态下,右导管螺旋桨在其盘面处进速的平均值;图8为与图5、7同一计算状态下所提取的右导管螺旋桨所产生的轴向诱导速度平均值.对比图5与7的结果可以看出,当双导管螺旋桨在进行逆时针方向转艏摆动时,在来流与逆时针方向转艏运动综合效应影响下,螺旋桨盘面处所感受的进速随转艏角的不同而有所差异,转艏角绝对值较大时进速较小.因此,转艏角较大时,导管螺旋桨将发出较大的推力.而当双导管螺旋桨在进行顺时针方向转艏摆动时,螺旋桨盘面处所感受的进速几乎不随转艏角的改变而发生变化.因此,在进行顺时针方向转艏摆动时,所计算的右导管螺旋桨所发出的推力也几乎不随转艏角的改变而发生变化.

图7 转艏摆动中右导管螺旋桨盘面处的进速平均值

图8 右导管螺旋桨所产生的轴向诱导速度平均值
对图5、7和8的计算结果进行对比还可以发现,在转艏摆动中,导管螺旋桨所发出的推力与该螺旋桨盘面处的进速以及螺旋桨作用下产生的轴向诱导速度直接相关.进速越小、轴向诱导速度越大,则螺旋桨所产生的推力也就越大.与对于在非定常的转艏摆动现象的讨论相似,导管螺旋桨在定常条件下,推力大小主要也是由在螺旋桨桨轴与来流夹角差异而造成的螺旋桨盘面处的进速及其在螺旋桨作用下所产生的诱导速度值的大小所决定.另外,当螺旋桨轴与来流夹角较小时,由于螺旋桨盘面处的进速较大,这时候的螺旋桨的推力就较小;反之,当螺旋桨轴与来流夹角较大时,由于螺旋桨盘面处的进速较小,这时候的螺旋桨的推力就较大.
2.2 转艏摆动时水下潜器流场对导管螺旋桨推力特性的影响
本节以所采用的数值模拟方法来观察作为水下潜器控制驱动机构的导管螺旋桨随水下潜器组合体转艏摆动时在水下潜器流场影响下的推力变化规律,以分析水下潜器主体以及其他附属机构不同参数组合对导管螺旋桨在转艏摆动中推力特性的影响.所观察的水下潜器系统如图1所示,其结构主要由一立式长流线型外形的主体、以及在其上方设置的二个鱼雷状浮体组成,控制导管螺旋桨设置在浮体的尾部,从水下潜器尾部向前看时所见到的螺旋桨桨叶一面为叶面,水下潜器及导管螺旋桨参数见表1和2,计算中所使用的计算域如图3(c)所示.
分析中,导管螺旋桨的旋转状态以及水下潜器整体的转艏摆动状态与上一节不考虑水下潜器流场影响时导管螺旋桨转艏摆动的推力特性分析时一致,即水下潜器整体绕其组合体垂向坐标轴在转艏角为±30°范围内作转艏摆动,右导管螺旋桨以20 r/s的转速一个正转、左导管螺旋桨以相同的转速反转.数值模拟中对水下潜器在进行转艏摆动时相对于不同的来流方向条件下导管螺旋桨的推力特性进行了数值计算和对比分析.图9为正转的右导管螺旋桨在水下潜器组合体进行转艏摆动过程中的推力数值计算结果.图9中还给出了无水下潜器流场影响时该导管螺旋桨的推力计算结果的对比.从图9的计算结果可以看出:水下潜器组合体转艏摆动时,考虑了水下潜器组合体流场影响时导管螺旋桨所发出的推力要比没有水下潜器组合体流场影响时要大.这是由于:对于文中所计算的水下潜器组合体中的导管螺旋桨,其前端鱼雷状浮体的存在所产生的伴流导致了流经其后的导管螺旋桨所感受的进速减小,从而引起螺旋桨推力的增大.

图9 有无水下潜器流场影响时右导管螺旋桨推力变化对比
图10中给出了有无水下潜器组合体流场影响时导管螺旋桨盘面处轴向平均进速的结果.对图9与图10的计算结果进行分析可以发现,导管螺旋桨在水下潜器组合体流场影响下所发出的推力存在以下特点:①与无水下潜器流场影响时的导管螺旋桨推力特性相似,水下潜器组合体系统中导管螺旋桨所发出的推力与螺旋桨盘面处轴向平均进速存在着大致的对应关系,在特定的转艏角和特定的转艏摆动状态下,螺旋桨盘面处的进速越小,它所发出的推力就越大.②对于相同的转速,由于水下潜器组合体所产流场的影响,导管螺旋桨所感受的轴向进速比无水下潜器影响时要小,水下潜器系统中导管螺旋桨所发出的推力要比单独导管螺旋桨所发出的推力要大.③由于文中所设定的左右导管螺旋桨的正反转的运转模式而导致这两个螺旋桨运转所产生的流场关于水下潜器纵中剖面的不对称,以及由于在水下潜器组合体进行顺时针或逆时针摆动时,所分析的右导管螺旋桨轴向运动趋势与来流方向分别处于同向或逆向状态等原因,对于相同的转艏角,在水下潜器组合体进行顺时针或逆时针转艏摆动时,导管螺旋桨盘面处所感受到的进速并不一致,由此导致了螺旋桨在水下潜器组合体进行顺、逆时针摆动时所发出的推力并不相同.顺时针方向摆动时螺旋桨所发出的推力要大于逆时针摆动时的推力.

图10 有无潜器影响时导管螺旋桨盘面轴向速度变化对比
2.3 浮体与导管螺旋桨距离不同所引起的螺旋桨推力特性的差异
从前面的分析中可以看到,对于文中所研究的水下潜器系统来说,螺旋桨前端的鱼雷状浮体与导管螺旋桨之间的相对位置关系对导管螺旋桨推力特性有着不可忽略的影响.为了观察鱼雷状浮体与导管螺旋桨之间不同的空间位置对导管螺旋桨推力特性的影响,图11给出了文中对导管螺旋桨与鱼雷状浮体之间不同的轴向距离时的导管螺旋桨推力特性计算结果,图11中的“间距”为螺旋桨盘面到浮体末端的距离.为了对比不同轴向距离条件下螺旋桨盘面处轴向速度与导管螺旋桨所发出的推力之间的关系,图12给出了与图11对应的导管螺旋桨盘面轴向速度对比图.
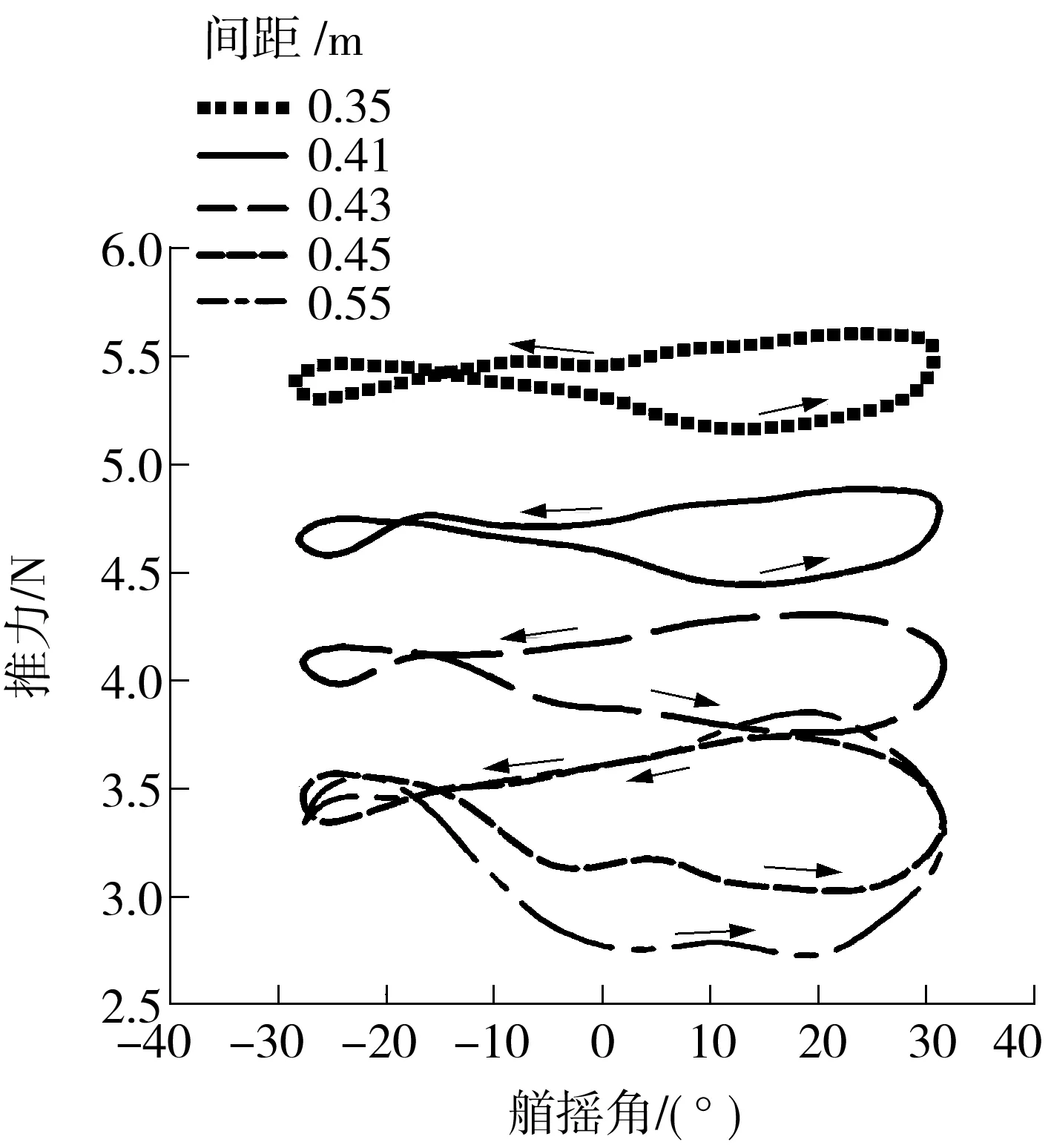
图11 导管螺旋桨与鱼雷状浮体不同的轴向距离对推力特性的影响

图12 导管螺旋桨与鱼雷状浮体不同的轴向距离影响时导管螺旋桨盘面轴向速度变化对比
从图11、12的计算结果可以看到,在鱼雷状浮体与导管螺旋桨之间水动力相互影响的区域内,它们之间轴向距离的不同对导管螺旋桨的推力特性影响显著,其相互影响区域长度大致等于螺旋桨的半径.随着浮体与螺旋桨之间轴向距离的减小,导管螺旋桨盘面处轴向速度减小,螺旋桨所发出的推进力增大,反之则情况相反.但是当它们之间的轴向间距超过影响区域长度后,导管螺旋桨推力特性变化不明显. 图11和12的计算结果表明:鱼雷状浮体对导管螺旋桨推力特性的影响主要也是通过浮体流场引起螺旋桨盘面处进速的变化而体现的;当浮体与螺旋桨之间的间距减小时,浮体对迎流水流的阻塞作用趋于明显,导管螺旋桨盘面处来流速度减小,螺旋桨叶切面的水动力螺距角增大,这时导管螺旋桨产生的推力也就增大;而当浮体与螺旋桨之间的间距增大到一定程度时,浮体对导管内螺旋桨流场的影响不再明显,导管螺旋桨的推力特性与鱼雷状浮体不再相关,其水动力性能为由螺旋桨本身的流场决定.
3 结论
文中以数值手段分析了水下潜器系统在进行转艏摆动时,作为系统中轨迹与姿态控制机构的导管螺旋桨的推力特征.数值分析中采用了多重滑移网格技术来刻画水下潜器主体以及其它附属机构+导管螺旋桨构成的水下潜器系统转艏运动引起的摆动流场以及导管内由于螺旋桨旋转而引起的旋转流场.利用这一技术可以方便地计算导管螺旋桨在水下潜器组合体影响下运转过程中螺旋桨的推力及流场特征,可以从水下潜器系统的整体视角去认识这样一种导管螺旋桨在转艏摆动中与潜器系统其他机构流场相互作用下的推力特征,为准确地把握和分析转艏摆动时水下潜器系统中导管螺旋桨的推进力的发生机理与规律提供了一种实用的数值分析方法.
计算结果表明:水下潜器组合体流场对导管螺旋桨的推进特性有不可忽略的影响,其中导管螺旋桨前端的鱼雷状浮体是影响其推进特性的主要因素,在其水动力相互影响区域长度范围内,浮体与螺旋桨之间轴向距离越小,螺旋桨所发出的推进力越大;鱼雷状浮体对导管螺旋桨推进特性的影响主要是通过改变螺旋桨盘面处的进速来体现;由于所设定的左右导管螺旋桨的正反转的运转模式、导管螺旋桨轴向运动趋势与来流方向的关系等原因,对于相同的转艏角,在水下潜器组合体进行顺时针或逆时针摆动时,导管螺旋桨盘面处感受到的进速并不一致,由此而导致了螺旋桨在组合体进行顺、逆时针摆动时所发出的推力并不相同.因此在研究附属于水下潜器组合体上并作为其控制机构的导管螺旋桨推进力特性时,只有将潜器组合体与所研究的导管螺旋桨组合成为一个整体,同时将该组合整体结合到水下潜器系统具体的运转环境来进行计算才能得到符合工程实际的结果.
[1] Avila J P J,Adamowski J C.Experimental evaluation of the hydrodynamic coefficents of a ROV through Morison’s equation [J].Ocean Engineering,2011,38:2162- 2170.
[2] Jaulin L.Robust set-membership state estimation;application to underwater robotics [J].Automatica,2009,45:202- 206.
[3] Li J H,Jun B H,Lee P M,et al.A hierarchical real-time control architecture for a semi-autonomous underwater vehicle [J].Ocean Engineering,2005,32:1631- 1641.
[4] 陈健,吴家鸣,徐灜,等.立式翼型主体拖曳式水下潜器的设计及操纵性能 [J].海洋技术学报,2015,34(4):1- 6. Chen Jian,Wu Jia-ming,Xu Ying,et al.Study on design and control performance of the underwater towed vehicle with vertical airfoil main body [J]. Journal of Ocean Technology,2015,34(4):1- 6.
[5] Fang M C,Hou C S,Luo H J H.On the motions of the underwater remotely operated vehicle with the umbilical cable effect [J].Ocean Engineering,2007,34:1275- 1289.
[6] 吴家鸣,崔寅,邓威,等.控制动作下的带缆遥控水下机器人水动力特性分析 [J].华南理工大学学报:自然科学版,2012,40(4):150- 157. Wu Jia-ming,Cui Yin,Deng Wei,et al.Hydrodynamic characteristics of tethered underwater robot under control mani-pulations [J]. Journal of South China University of Technology:Natural Science Edition,2012,40(4):150- 157.
[7] 吴家鸣,郁苗,朱琳琳.带缆遥控水下机器人水动力数学模型及其回转运动分析 [J].船舶力学,2011,15(8):827- 843. Wu Jia-ming,Yu Miao,Zhu Lin-lin.A hydrodynamic model for a tethered underwater robot and dynamic analysis of the robot in turning motion [J].Journal of Ship Mechanics,2011,15(8):827- 843.
[8] 吴家鸣,熊小辉.多机构控制下的拖曳体三维水动力响应分析 [J].华南理工大学学报:自然科学版,2007,35(2):54- 58. Wu Jia-ming,Xiong,Xiao-hui.3D hydrodynamic response analysis of underwater towed vehicle under joint manipulations of multiple controls [J]. Journal of South China University of Technology:Natural Science Edition,2007,35(2):54- 58.
[9] 吴家鸣,邓威,赖华威.回转状态下导管螺旋桨水动力特性的数值模拟 [J].华南理工大学学报:自然科学版,2010,38(7):90- 96. Wu Jia-ming,Deng Wei,Lai Hua-wei.Numerical simulation of hydrodynamic characteristics of ducted propeller in turning motion [J].Journal of South China University of Technology:Natural Science Edition,2010,38(7):90- 96.
[10] 王福军.计算流体动力学分析——CFD软件原理与应用 [M].北京:清华大学出版社,2004:1- 4.
[11] 韩占忠,王敏,兰小平.FLUENT流体工程仿真计算实例与应用 [M].北京:北京理工大学出版社,2004.
[12] 赖华威,刘月琴,吴家鸣.基于CFD 方法的螺旋桨性能计算与分析 [J].船海工程,2009,38(4):131- 135. Lai Hua-wei,Liu Yue-qin,Wu Jia-ming.Calculation and analysis of propeller performance by CFD [J].Ship and Ocean Engineering,2009,38(4):131- 135.
[13] Ansys Inc.Ansys fluent 14.5 user’s guide [M].Canonsburg:Ansys Inc,2012:148- 155.
[14] Ansys Inc.Ansys fluent 14.5 theory guide [M].Canonsburg:Ansys Inc,2012:580.
[15] 王瑞金,张凯,王刚.FLUENT技术基础与应用实例 [M].北京:清华大学出版社,2007:182- 183.
Analysis of Thrust Characteristics of Ducted Propeller in Underwater Vehicle with Yawing Motion
WuJia-mingYeZhi-jianJinXiao-dongZhangCheng-weiXuYing
(School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China)
In the investigation,the CFD approach and the multi sliding mesh technique are used to numerically simulate the thrust characteristics of a ducted propeller in an underwater vehicle with a yawing motion,in which the ducted propeller is utilized as the major control mechanism to manipulate the vehicle and the propeller running motion is influenced by the fluid field of the components of the vehicle.Then,the effect of the underwater vehicle assembly on the thrust of the ducted propeller is discussed,and the law of issuing thrust of the ducted propeller in the vehicle with a yawing motion is examined.Moreover,the hydrodynamic interaction between the ducted propeller and the vehicle assembly is analyzed.Simulation results indicate that (1) the fluid field of the underwater vehicle assembly has a non-ignorable effect on the thrust characteristics of the ducted propeller,of which the torpedo-shaped buoyant hull on the front of the ducted propeller is the major factor affecting its thrust characteristics;(2) within the hydrodynamic interaction region,the smaller the axial distance between the buoyant hull and the ducted propeller,the greater the thrust issued by the ducted propeller will be;and (3) the effect of the torpedo-shaped buoyant hull on the thrust characteristics of the ducted propeller is mainly exhibited by altering the rate of advance on the ducted propeller disk.When the thrust characteristics of the ducted propeller in the underwater vehicle system is discussed,only by taking the vehicle and the ducted propeller as an integrated assembly and by incorporating such an integrated assembly with the specific environment of the underwater vehicle system to conduct relevant computation,can the results in accordance with engineering application be achieved.
ducted propeller;underwater vehicle;CFD;hydrodynamics;yawing motion
2015- 02- 12
国家自然科学基金资助项目(11372112,10772068) Foundation items: Supported by the National Natural Science Foundation of China(11372112,10772068)
吴家鸣(1957-),男,教授,博士生导师,主要从事船舶与海洋工程水动力学研究.E-mail: ctjmwu@scut.edu.cn
1000- 565X(2015)12- 0141- 08
TV 131.2
10.3969/j.issn.1000- 565X.2015.12.020
猜你喜欢
能源工程(2022年2期)2022-05-23
舰船科学技术(2021年12期)2021-03-29
装备制造技术(2020年3期)2020-12-25
水利规划与设计(2020年1期)2020-05-25
上海船舶运输科学研究所学报(2019年1期)2019-04-19
振动工程学报(2018年3期)2018-07-05
哈尔滨工程大学学报(2017年11期)2017-12-06
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
弹箭与制导学报(2015年1期)2015-03-11
棋艺(2014年7期)2014-09-09