回转体自动喷涂工作站的研制
2015-04-25 09:57孙德奎高云萌
制造业自动化 2015年22期
孙德奎,李 慧,高云萌,刘 彤
SUN De-kui, LI Hui, GAO Yun-meng, LIU Tong
(北京机械工业自动化研究所,北京 100120)
0 引言
长期以来,在我国制造业领域,产品外表面涂层喷涂一般采用手工作业,存在精度差、涂料利用率低、施工条件差等问题。随着自动喷涂技术的发展,国内外相关领域开始采用机器人或专用装备实现产品喷涂[1,2]。
本文介绍的回转体自动喷涂工作站是针对某生产企业需求,依据待涂工件的外形特征而研制开发的。系统组成如下:
1)ABB IRB540型(短臂)喷涂机器人1台;
2)回转工作台1台;
3)涂料输供系统1套;
4)真空吸附系统1套;
5)工作站总控制柜1台。
工作时,通过真空吸附装置将工件吸附在回转工作台面上,确保安全后,由控制系统控制回转工作台与喷涂机器人协调作业完成对工件的喷涂。
1 系统介绍
1.1 ABB IRB540型(短臂)喷涂机器人
蕴含人性化设计的IRB 540是一种平衡性极佳、结构精简的机器人,采用独有的FlexiWrist专利技术,极大地便利了人工编程操作(点对点连续路径)。只需人工将机器人移至各个目标程序位置,然后按触发钮,系统将自动编写RAPID程序指令。该机器人带有工艺控制系统(IPS),能稳定保持出色的涂装质量并防止过喷,减少原料耗用和浪费。具有涂料循环系统及控制,能实时监控涂料的流量,降低能量的消耗,并实现与机器人动作的精准同步,同时具有自动换色功能,提高生产效率。 IRB 540型(短臂)喷涂机器人是为中小型零件喷涂而设计的机器人[3]。
1.2 回转工作台
回转工作台,如图1所示,由伺服电机经减速机驱动,经一对直齿齿轮带动主轴旋转,被喷工件经真空吸附安装在主轴上部具有真空吸附作用的圆盘或凹槽中,与主轴同时旋转,系统采用正压防爆设计。
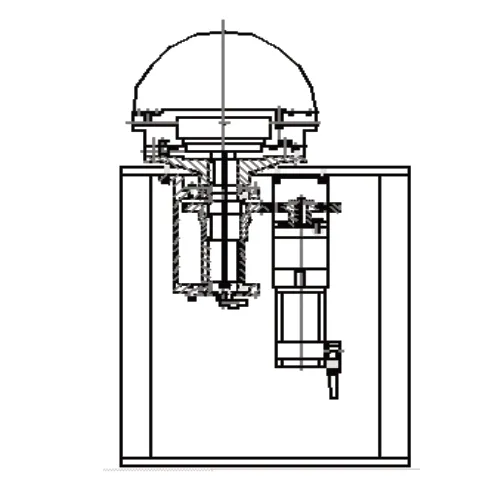
图1 回转体工作台
回转台的工作由总控系统控制,可实现1~120rpm可调的连续回转,总控系统根据不同的工件协调回转工作台运动配合机器人完成整个喷涂过程。
1.3 涂料输供系统
涂料输供系统,选用美国GRACO公司的产品,主要包括:自动HVLP空气喷枪1把;2加仑标准压力罐1个;隔膜泵1个、自动换色阀1个,管路1套及控制调节组件1套。
1.4 真空吸附装置
回转体工件放置于真空吸附装置的密封圈上,通过抽真空的方式,将工件吸附在回转台上,并配有真空压力检测传感器,实时监测真空压力。当检测压力小于设定值,系统发出报警,同时回转台停止旋转,防止工件掉落,确保系统安全作业。
1.5 工作站控制系统
1.5.1 总控系统
深入贯彻落实中央水利决策部署 全力加快推进新一轮治淮…………………………………………………… 钱 敏(24.70)
总控系统由上位机、下位机、伺服控制系统及机器人控制系统组成。
总控系统上位机采用研华的工控机,其主要负责系统的综合管理,如系统功能显示,系统状态监控,自动生产数据统计及打印报表,故障记录报警显示管理,机器人离现示教和转盘的示教等。下位机采用西门子公司的S7-200 PLC,通过系统的I/O接口与外围系统进行连接,主要作用是对外围信号、回转装置、总控台指令信号、喷漆机器人系统信息进行实时处理,协调整个系统的工作。伺服控制器与PLC实时通讯完成对转台的控制。机器人控制系统与PLC实时通讯完成对喷涂机器人的控制。
1)总控系统硬件构成:
工业控制计算机:选用研华工控机。
PLC控制器:选用西门子公司的S7-200 PLC。
总控台:包含电源控制电路及控制按钮。
伺服控制系统:采用丹纳赫S603伺服控制器。
上位监控组态软件:选用杰控公司的FameView工业组态软件对系统工作状态进行监控。
2)外围系统构成:
温湿度仪表:测量喷房温度及湿度,传送至总控系统。负压真空传感器:检测真空吸附度。
总控系统完成整个工作站的协调控制、外围系统检测、工作状态监控、参数上传及下载、 系统管理、系统维护、权限管理、系统故障显示、系统信息打印等功能。
1.5.2 机器人控制系统
采用IRC5P系统,是高品质涂装的捷径,具有安装调试简单快捷,超常的正常运行时间,融合IPS技术,是集成式喷涂机器人控制系统。与总控系统实时信息交互,控制机器人本体轨迹实现,完成对回转体工件的喷涂。
1.5.3 控制系统原理
如图2所示。
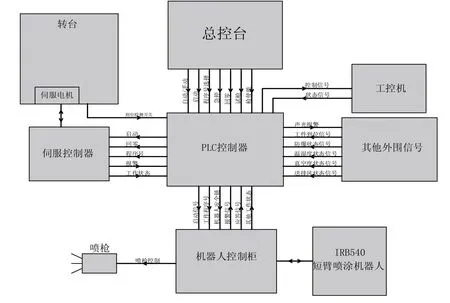
图2 控制系统原理图
2 工作过程描述
系统上电后,总控系统检测系统各单元的工作状态是否正常,机器人系统自检通过,也向总控系统发准备就绪信号,并在喷涂初始位置等待。
操作者在上位机输入机器人喷涂程序号及喷涂参数,并设置好喷涂遍数,参数设置完毕,发出启动命令。回转工作台根据程序号,按照设置好的速度做旋转,机器人启动后分段完成对工件的喷涂作业。喷完第一遍,旋转工作台停转,机器人回工作初始位置,控制系统自动发第二遍喷涂的信号,回转工作台带动工件旋转,机器人开始工件的第二遍喷涂。直至完成设定的喷涂遍数,回转工作台停止待命,机器人回工作初始位置,为一个喷涂过程结束。
工作流程如图3所示。
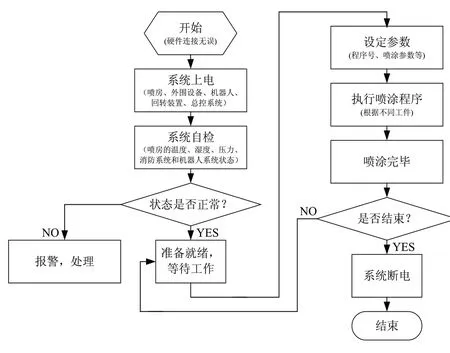
图3 工作流程图
3 结束语
该自动喷涂工作站已实际应用于某单位,并已取得良好的使用效果。由于喷涂工件是危险品,工作站的投入使用,提高喷涂质量,同时将操作人员从密闭危险的环境下解放出来,实现自动化生产。
[1] Seegmiller N A. Precision robotic coating application and thickness control optimization for F-35 final finishes[J].SAE Journal,2010(3).
[2] 林青,沙春鹏,张波,徐磊,孙德奎,刘晨,赵宏剑,王崇.飞机进气道自动喷涂设备研制[J].制造业自动化,2013:92-93.
[3] ABB机器人参考手册 IPS结构[Z].2008.
[4] ABB机器人参考手册 IPS结构[Z].2008.
猜你喜欢
今日农业(2022年16期)2022-11-09
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
电脑报(2020年32期)2020-09-06
科技传播(2019年22期)2020-01-14
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年1期)2018-04-04
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27