框架车行走液压驱动系统差速控制的研究
2015-04-25 01:46安四元
机床与液压 2015年10期
安四元
(中国煤炭科工集团太原研究院,山西太原030006)
支架搬运车在行驶过程中,特别是转弯时,每个车轮的转速是不一样的,尤其是采用两边独立驱动的情况下,如果不加以调节,就会出现车轮不同步导致轮胎磨损。为了避免这个情况,设计框架车液压驱动系统差速控制装置,能提高框架车行驶的稳定性,使车辆在行驶过程中自动调节各驱动轮的行驶速度,使驱动轮在行驶过程中和地面保持纯滚动,以实现自动控制差速。
1 框架式支架搬运车液压驱动系统原理介绍
如图1 所示,煤矿井下框架车的液压行走系统左右相互独立,每一侧分别由闭式泵1、先导控制阀2、先导控制阀3、凸轮4 和液压马达5 组成。闭式泵给液压系统提供高压油,高压油推动液压马达旋转输出动力,带动车轮转动,先导控制阀1 控制车辆的前进和后退,先导控制阀1 由先导控制阀2提供压力控制油,凸轮4 控制先导控制阀2 上顶杆的位移,顶杆位移决定了先导控制阀2 输出的压力。

图1 液压驱动系统原理
2 支架搬运车差速控制装置的设计
2.1 差速控制
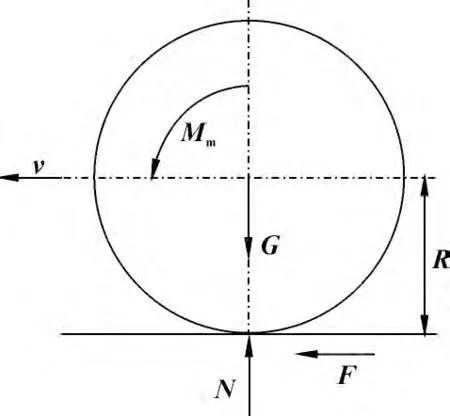
图2 驱动轮受力分析图
车辆在转向时,同一轴线内外侧车轮的转速不一样,外侧车轮的转速大于内侧车轮的转速,如果内外侧车轮转速一样,则外侧车轮必定发生滑移。为了较好地解决差速控制问题,使其达到预定的性能,下面以单个驱动轮为例,并假设车轮完全刚性,行驶过程中车轮和地面始终保持纯滚动,驱动轮受力见图2。
由上图受力分析可得出驱动轮力矩平衡方程为

式中:Mm为马达输出扭矩,N·m;G 为轮胎承受的载荷,N;N 为地面支撑力,N;F 为牵引力,N;f为地面静摩擦因数;R 为轮胎有效滚动半径,m。
由上述公式可知,牵引力F=Mm/R≤N·f =G·f,即Mm≤f·G·R,车辆行驶的牵引力F 是由液压马达的输出转矩Mm决定的,随着马达输出扭矩Mm的变化而变化,但牵引力F 的变化要受路况的制约,其最大值不能超过地面对轮胎的最大静摩擦力,如果所受牵引力超过地面最大静摩擦力,轮胎将会发生滑动。这样不但会造成轮胎磨损,而且还会造成行驶失控,这就是要解决的差速控制问题。由以上分析可以得出:只要阻止车轮滑动的阻力不超过轮胎的最大滑动摩擦力,车轮就不会产生滑动。
传统的车辆是通过机械传动来传递动力的,是经过离合器→变速器→传动轴→差速器→半轴这样几种装置的作用才使车轮驱动的,其中差速器用来实现左右车轮转向差速同步性;除了机械差速器之外,工程车辆上用的还有一种靠液压自适应式差速转向,该差速转向是通过驱动车轮行走的变量马达通过流体传动自适应特征来实现差速的;框架式支架搬运车采用静液压驱动系统,并且左右两边液压系统相互独立,依照普通的机械差速转向和液压自适应转向是不可能实现的。
2.2 框架车差速控制装置的设计
由于框架车液压系统左右驱动相互独立,车辆在转向时不容易实现差速,需设计差速控制装置。如图3 所示,液压驱动系统中差速控制装置主要包括两个先导控制阀2 和凸轮3,先导控制阀安装在后机架1上,凸轮3 装在前机架5 上,前后机架通过铰接销轴4 连接。车辆在转向时,凸轮跟随前机架一起转动,两个先导控制阀随着凸轮的转动,其顶杆的位移发生变化,两个先导控制阀的出口压力也发生相应地变化,进而引起两个液压泵的排量发生变化,左右两侧的马达实现了差速。

图3 差速转向控制装置
差速控制装置中凸轮将左右两侧独立的液压驱动系统连接起来,是个很关键的元部件,凸轮设计的好坏决定了车辆差速转向控制性能,决定了车辆转向时左右两侧车轮的协调性。如图4 所示,凸轮是由1、2、3 三段曲线弧生成的扇形结构,3 段曲线弧决定了两个先导控制阀顶杆伸出的位移。

图4 凸轮外形图
3 结束语
框架式支架搬运车液压驱动系统差速控制装置可以有效解决煤矿井下支架搬运车转向时左右两侧车轮的差速问题,可以很好地满足矿井下狭窄巷道车辆转弯半径小的要求。此外,该装置为车辆轮胎的使用寿命提供了强有力的保障,并随着井下车辆的广泛普及应用,对煤矿井下安全生产具有积极意义。
[1]常凯.煤矿用液压支架搬运车的选型探讨[J].煤矿机械,2010,31(6):72-74.
[2]柳玉龙.液压传动在支架搬运车中的应用[J].煤矿机械,2010,31(7):177-179.
[3]姚怀新.工程机械底盘及其液压传动理论[M].北京:人民交通出版社,2001.
[4]安光明.框架式支架搬运车的闭式回路静液压传动系统探讨[J].煤矿机械,2010,31(12):128-129.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
中国新技术新产品(2020年4期)2020-05-05
制造技术与机床(2019年8期)2019-09-03
石油化工自动化(2018年5期)2018-11-14
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
科技创新导报(2016年27期)2017-03-14
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
工业设计(2016年7期)2016-05-04