
1种机场场面移动目标特征提取方法*
2015-05-08 09:11汤新民沈志远高尚峰
交通信息与安全 2015年3期
吴 淼 汤新民 沈志远 高尚峰
(南京航空航天大学民航学院 南京210016)
0 引 言
由于机场飞机起降架次增多等原因,跑道入侵成为影响飞行安全的重大隐患,预防跑道入侵成为重要问题。目标检测,通常认为是非协作式机场场面活动目标的检测和识别方法,作为跑道入侵防御系统最为基础的系统监视功能部分,能够为目标跟踪和入侵控制提供信息支持[1]。利用地 磁 传 感 器 (anisotropic magneto resistance,AMR)作为目标检测器,通过其得到场面移动目标磁信号,信号数据中含有丰富的目标信息,在去除信号中的噪声干扰后,如何提取目标特征是本文研究的关键。
目前应用于机场场面的目标特征提取主要是基于视频图像信号和雷达信号[2],但其处理数据复杂,且视频图像的检测方式稳定性不高,易受天气影响。在目标信号的特征提取中,多采用时域特征方法提取目标特征。文献[3]提出利用车辆检测算法获得车辆特征向量,并将所有时域波形归一化进行特征提取,此方法以牺牲目标长度特征信息为代价,有效地减少了计算量;文献[4]根据不同车辆地磁扰动特性,抽象出了相车长、平均能量、归一化方波的波峰波谷数目3类时域信号特征,信号的时域特性虽然能够直观反映信号特征,但是只从信号外观描述信号的特性。而机场场面移动目标包含场面上的车辆和飞机,场面目标种类较多且飞机磁信号具有一定的复杂性,只分析信号的时域特征并不能全面展现信号特性,需要补充信号的频域特征。小波分析作为1种信号的频域部分特征的提取手段,在声信号及振动信号的特征提取中有较好的应用。文献[6]利用小波多变换获得信号的频域特征从而识别水下目标;文献[7]利用小波分析方法提取人体脉象信号特征,取得了良好的识别效果。为此,笔者在前人研究的基础上,提出了1种结合时域特征和基于小波分解的频域特征的机场目标特征提取方法,以机场场面部分车辆和航空器磁信号为样本,利用目标特征区分度测度的方法进行了验证。
1 时域特征提取
1.1 目标长度特征提取
AMR地磁传感器(霍尼韦尔HM5883)具有体积小、灵敏度高、成本低廉的特点。AMR地磁传感器的布置方式如图1所示。在机场跑道及滑行道中线布置2个传感器s1,s2,两者的距离为l。

图1 AMR地磁传感器布置Fig.1 Anisotropic Magneto Resistance layout
目标长度是目标的首要特征参数,要提取目标长度特征,需要获得目标速度。目标感知信号宽度实际上就是目标经过传感器采样节点的时间宽度[3]。目标通过先后通过2个传感器的时间间隔很小,因此,可以认为其匀速通过传感器采样节点,有:

式中:v为目标速度;t1为目标经过s1的时刻;t2为目标经过s2的时刻。则目标长度L为式中:ts为传感器采集信号的时间宽度。

1.2 感知信号时域规整
同一目标以不同速度经过传感器节点时,其感知信号的时间轴宽度不同。为了消除速度对目标分类识别的影响,必须提取与速度无关的特征量。本文利用基于目标长度的归一化方法规整时域信号。根据目标长度特征对磁信号进行规范化处理,将其转换为相应固定的长度的信号数组,并保留能够做进一步目标特征提取的信息特征。
规定长度为L的目标磁信号的数据点个数为N,对相同长度目标的磁信号向量数组进行归一化[4]。信号归一化的方法为

式中,t(k)为原始的数据,k=1,2,…,Ki,Ki因目标长度的不同而不同;c(i)为信号归一化后第i组数;Δn为归一化后信号第1到N-1组中每组的数据个数;N为原始信号进行归一化后以时间戳形式重分的数据组个数;c(N)归一化后信号的第N组数;Ki-(N-1)·Δn为归一化信号后第N组数的数据个数。
图2为根据目标长度规整后的食品升降车,加油车及机场引导车,塞斯纳550B,空客320及空客340的时域信号,这6种目标为机场场面典型的目标类型。食品升降车与加油车车长相同,其规整后的时域信号数据点个数也相同,而机场引导车及3种不同类型的飞机的长度不一,其规整后的时域信号的数据点个数相应的压缩或扩充,规整后的信号皆保留了原始信号特征信息。
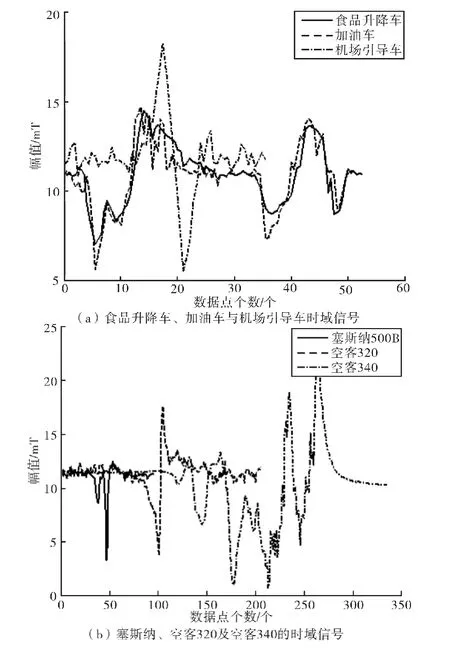
图2 不同车辆与飞机的规整后时域信号Fig.2 Structured time domain signals of different vehicles and aircraft
1.3 峰值特征提取
目标磁信号的变化剧烈程度与目标自身铁磁材料的分布密度有关,尽管不同的移动速度会造成信号采样点个数或者时间宽度的差异,但目标材料的构造及分布却是目标本身属性。构成目标的铁磁性材料的结构越多,磁信号的扰动越强。图3为波音737-800磁信号扰动峰值特性与机身的相对位置,磁信号变化剧烈的部分表明这些地方的磁性材料的分布相较于整架飞机较为集中,分别对应于尾翼与机翼。尾翼结构主要为垂直安定面,方向舵,升降舵等,机翼部分由发动机,起落架及油箱等部分构成。信号的峰值反映了磁性材料相对机身的位置及其分布的密度[5]。
设目标长度为L的感知信号,规整后数据点个数为N,波峰数为m,最大峰值振幅hmax为信号的第nmax点,最大峰值的位置比为nmax/N,最小峰值hmin为信号的第nmin点,最小峰值的位置比为nmin/N。图3中波音737-800的机身长度L=40m,规整后时域信号的数据点个数为N=200,波峰m=3,最大振幅hmax=137,最大峰值位置比nmax/N =0.72,最小峰值hmin=31,最小峰值位置比为nmin/N =0.52。

图3 波音737-800信号扰动峰值特性与相对机身位置Fig.3 The peak feature of Boeing 737-800signal and its relative position to the plane
2 基于小波变换的频域特征提取
2.1 小波变换的基本概念
笔者利用小波变换方法对信号进行时域分析,与傅里叶变换相比较,小波分析具有多分辨特性和良好的时频局部化特性。通过小波函数展开信号,可以在不同尺度上对信号进行分解。
设ψ(t)∈L2(R),如果满足<+ω则称ψ(t)为基本小波或母小波,ψ(ω)为ψ(t)的傅里叶变换。将母小波ψ(t)进行某种程度的伸缩和平移,即ψa,τ(t)=),a>0,τ∈R,ψa,τ(t)称为小波基函数。将小波基函数ψa,τ(t)作用于待测信号f(t),与f(t)做内积得到WTf(a,τ)= [f(t),ψa,τ(t)]=称为连续小波变换[6]。
在实际应用中,连续小波变换需要进行离散化,二进制离散小波取a=2-j,τ=2-jk(j=0,1,2…,k为正整数)。将信号进行二进离散小波变换,可分解成不同尺度下的各个分量。信号f(t)向尺度空间Vj投影后得到j尺度下的近似信号为(t),式中φj,k(t)为尺度函数,尺度展开系数cj,k= [f(t),φj,k(t)]。信号f(t)向小波空间Wj投影后所得到该空间的细节信号为。其中:小波系数dj,k= [f(t),ψj,k(t)]。
2.2 频域特征提取
霍尼韦尔HM5883传感器连续测量模式的采样频率为75Hz。根据奈奎斯特采样定理,感知信号的频率范围为0~37.5Hz。利用Matllat分解算法3层分解信号,将规整后的时域信号分解成3层细节信号和1个近似信号,即将频率划分为低频0~4.687 5Hz,中低频4.687 5~9.375 Hz,中高频9.375~18.75Hz,高频18.75~37.5 Hz 4个频带[7],见图4。

图4 信号频带划分Fig.4 Division of the frequency band
感知信号能量的计算公式为

式中:E0为信号总能量;ECA3为近似信号能量值;ECDj为信号f(t)在第j尺度下的小波能量。不同类型目标在各个尺度下小波能量比是不一样的,将归一化后的各阶小波能量值与近似信号能量比作为信号的频域特征向量,即Ei=[ECA3/E0,ECD3/E0...ECD1/E0]。图5为规整后波音737-800与空客320磁信号的db2(Daubechies 2)、db5(Daubechies 5)3层小波分解对比图。db5小波不仅在近似信号和细节信号中具有更高的表现力,且二者的频域特征的区分在db5小波分解中比db2更明显。对比不同小波的分解结果,最终选取db5小波分解信号。


图5 波音737-800磁信号db2与db5的3层小波分解Fig.5 3scales wavelet decomposition of Boeing 737-800magnetic signal by db2and db5
图6 所示为食品升降车,加油车及机场引导车,塞斯纳550B,空客320及空客340的规整后时域信号的db5小波3层分解。从各目标类型的频域信号分解中可以看出各目标类型的频域信号在频带中的分布情况。加油车的d1系数波动比食品升降车更为强烈,而机场引导车的d3系数变化比加油车和食品升降车的变化更明显。空客340的d1和d3系数比空客320及塞斯纳550B变化更显著,塞斯纳550B的d2系数波动高于空客320及空客340。

图6 3种车辆及飞机磁信号的3层小波分解Fig.6 3scales wavelet decomposition of 3vehicles and aircraft
3 不同目标特征区分度的测度
通过时域和频域特征提取方法一共抽象出10个特征,x={x1,…,x10},分别为目标长度L(x1)、波峰数m(x2)、最大峰值hmax(x3)、最大峰值的位置比为nmax/N(x4)、最小峰值hmin(x5)、最小峰值的位置比为nmin/N (x6)、近似信号能量比 ECA3/E0(x7)、三阶信号能量比ECD3/E0(x8)、二阶信号能量比ECD2/E0(x9),以及一阶信号能量比ECD1/E0(x10)。特征提取的目的是保证目标特征能够与其他类别的目标特征具有足够的区分度从而完成目标类型的最终分类[8]。各类型目标特征的相对距离越大,说明目标特征间的相似度越低,区分度越明显。本文利用目标特征区分度测度方法来衡量目标特征间的相对距离。
设目标类型的集合为A= {A1,A2,…,A7},目标各特征权重为 w = {w1,w2,…,w10},第k类目标的特征值为xk= {,,…,},第 m类(m ≠k)目标的特征值为xm= {,,…,}。

式中:xi为所有目标的第i个特征值之和;Dkm为第k类目标与第m类目标特征值的相对距离;D为目标类型集合中所有目标之间相对距离之和。2个特征的相似度的度量计算公式为

式中:Xi为第k类目标与第m类目标的第i个特征值之比,为


求得权重wi从而获得各类目标特征与其他各类型目标特征的相对距离Dkm、距离总和D及相似度Skm,得到各类型目标特征的区分度。
4 实 验
4.1 实验步骤
笔者以机场场面的部分移动的飞机/车辆磁信号为样本,部分飞机磁信号数据来自于H.Gao[10]与 K.Dimitropoulos[11],部分车辆数据于2013年在机场附近采集,利用霍尼韦尔HM5883L型号的AMR地磁传感器作为目标检测器,采用动态阈值法进行滤波。首先利用时域特征提取方法获得待测目标的长度,根据目标长度规整时域信号,在此基础上提取时域部分的峰值特征并利用db5小波3层分解信号提取信号频域特征,将所提取的目标时域特征和频域特征结合共同构成待测信号的全部特征[12]。时频域的特征提取方法一共抽象出10个特征值,根据目标特征区分度测度算法获得各类型间目标特征的相对距离,即依据目标类型建立特征值的分配权重矩阵及目标特征相对距离的单优化模型,计算出第k类目标特征值的分配权重及其与其他目标类型特征的相对距离总和及相似度。图7为特征提取方法流程图。

图7 特征提取方法Fig.7 Feature extraction method
1)时域特征提取。首先为目标长度的获取,以食品升降车为例。设定2只AMR地磁传感器s1,s2之间的距离为l=5m,目标先后经过二者的时间差为Δt=0.58s,并且目标经过其中1个AMR地磁传感器的时间检测域宽度为ts=0.81 s,由此得到目标长度=7m,依据目标长度规整时域信号,消除速度对信号检测宽度的影响。
其次为感知信号的峰值特征提取,食品升降车规整后时域信号如图2(a)。可得到波峰数m,最大峰值hmax,最大峰值的位置比为nmax/N,最小峰值hmin,最小峰值的位置比为nmin/N分别为4,145,0.27,69,0.11。
2)频域特征提取。对规整后的时域信号进行频域特征提取。AMR地磁传感器的采样频率为75Hz,利用db5小波进行3层信号分解,信号总能量值为E0=1 548 274.68,近似信号能量值ECA3=1 559 189,第1层、第2层、第3层小波能量值ECD1、ECD2、ECD3分别为4 521.65,1 247.35,405.39,归一化近似信号能量值及各层小波能量值,即将近似信号能量值ECA3和3层小波能量值ECD1,ECD2,ECD3分别与信号总能量E0进行比较,得到食品升降车的磁感知信号归一化近似信号能量比及3层小波能量比为Ei= [ECA3/E0,ECD3/E0,… ,ECD1/E0]= [0.9 9 3,0.0 0 2 9,0.000 8,0.000 26],将其作为信号的频域特征,并结合时域特征,得到食品升降车信号特征为x={x1,… ,x10}= {7,4,1 4 5,0.2 7,6 9,0.1 1,99.3%,0.29%,0.08%,0.026%}。
4.2 实验结果及分析
检测样本的目标类型为机场引导车,食品升降车,加油车,塞斯纳550B,波音737-800,空客320,空客340 7 种类型[13]。按照时域频域特征结合的特征提取方法分别对车辆及飞机目标磁信号检测样本进行特征提取。表1为7种目标的时域特征及频域特征。

表1 目标类型时频域特征Tab.1 The time domain futures and frequency domain features of the targets
以食品升降车为例,根据目标特征区分度测度算法分别计算食品升降车时域、频域及时频域特征与另外6种目标时域特征、频域特征及时频域特征距离[12]。根据算法获得食品升降车时频域特征分配权重为w时频={0.15,0.11,0.07,0.05,0.11,0.11,0.01,0.09,0.15,0.15},其时域特征分配权重w时域={0.3,0.2,0.1,0.1,0.1,0.2},频域特征分配权重为w频域={0.05,0.2,0.35,0.4}。表2为对比3种特征提取方法的其他6种目标特征与食品升降车的相对距离。

表2 其他类型目标与食品升降车的相对距离Tab.2 The distance between other target and catering truck
对照表2,在时域特征提取方法中,食品升降车与加油车的目标特征距离为0.013,表明其时域特征极其相似,仅依靠时域特征方法不能很好的区分2种目标类型,而时频域特征提取方法使得其特征距离提高到0.046,2种类型区分度增大。在频域特征提取方法中,食品升降车与波音737及空客320的特征距离分别为0.027,0.026,但在时频域结合的特征提取方法中,食品升降车与二者的特征距离为0.082,0.083,使得食品升降车与这2种飞机有较明显的区分度。
图8为3种特征提取方法的目标类型相似度对比。横坐标目标类型对比中数字1,2,3,4,5,6,7分别表示机场引导车,食品升降车,加油车,塞斯纳550B,波音737-800,空客320,空客340 7种目标类型,1-2即表示机场引导车与食品升降车的对比。对照图8,对7种目标间相似度求平均值,目标间时频特征的平均相似度为0.516,略高于频域特征的0.489,略低于时域特征的0.523,但是时频域特征提取方法使得目标之间的相似度均低于0.79,没有出现不同目标类之间具有极高相似度的情况。食品升降车与加油车时域特征的相似度为0.937,而时频域特征相似度为0.775,加油车与波音737-800的频域特征相似度为0.936,而时频特征相似度为0.759,时频域特征提取方法能够在时域特征区分度不够时,补充信号的频域特征对目标进行分类,反之在时域特征区分度不够的情况下,可补充信号的时域特征对目标进行分类[14]。总体说来,信号的时频域特征综合时域特征和频域特征,其丰富的特征信息能够更全面的反映信号特性,能够有效的平衡及降低各目标间的相似度。

图8 3种特征提取方法的目标相似度对比Fig.8 The comparison of the similarity of 3feature extraction methods between different targets
5 结束语
考虑机场场面目标类型的复杂性,并针对现有目标特征提取方式的不足,笔者提出了1种基于机场场面目标识别的时频域结合的特征提取方法。即首先是时域特征提取,通过双传感器方式获得移动目标长度,并根据目标长度规整时域信号,在此基础上提取信号的峰值特征并利用小波多尺度变换提取信号频域特征,将目标信号的时域特征和频域特征结合起来共同构成待测信号的全部特征。本文以场面移动车辆及飞机磁信号为样本,分别利用时域特征提取方法,频域特征提取方法及时频域特征提取方法提取目标特征,并利用目标特征区分度测度计算3种特征提取方法的目标间特征相对距离及相似度,验证本文提出的时频域方法使得目标间具有更好的区分度。
[1] 陈平,汤新民,邢健,等.目标感知事件驱动的跑道入侵控制策略研究[J].交通信息与安全,2013,31(6):125-131.CHEN Ping,TANG Xinmin,XING Jian,et al.Research on the runway inclusion control strategy based on objective perception events driven model[J].Journal of Transport Information and Safety,2013,31(6):125-131.(in Chinese)
[2] 靳俊峰,方青,田明辉.基于隶属度和贝叶斯分类的机场目标分类研究[J].雷达与对抗,2013,33(1):23-25.JIN Junfeng,FANG Qing,TIAN Minghui.Airport target classification based on subjection and Bayes′theorem[J].Radar&ECM,2013,33 (1):23-25.(in Chinese)
[3] 陈华.基于AMR地磁感应检测器的车辆检测和分类识别[D].天津:天津大学,2009.CHEN Hua.Vehicle Detection and Classification by AMR Magnetic Sensor[D].Tianjin:Tianjin University,2009.(in Chinese)
[4] 雷旭,侯莹莹,武奇生.地磁车辆检测器车型分类算法设计[J].长安大学学报:自然科学版,2013,33(5):120-123.LEI Xu,HOU Yingying,WU Qisheng.Design of classification algorithm on vehicle geomagnetic detecting system[J].Journal of Chang′an University:Natural Science Edition,2013,33(5):120-123.(in Chinese)
[5] LI H,DONG H,JIA L,et al.Vehicle classification with single multi-functional magnetic sensor and optimal MNS-based CART[J].Measurement,2014(55):142-152.
[6] 陈柔伊.水下目标识别中的特征提取与分类研究[D].广州:华南理工大学,2011.CHEN Rouyi.The research on feature extraction of target identification underwater[D].Guangzhou South China University of Technology,2011.(in Chinese)
[7] 周红标.基于小波变换的脉搏信号特征提取[J].电子测量技术,2009,32(9):77-79.ZHOU Hongbiao.Feature extraction of pulse signal based on wavelet transform[J].Electronic Measurement Technology,2009,32(9):77-79.(in Chinese)
[8] 吴皓.基于地磁的车辆检测系统与识别算法研究[D].武汉:华中科技大学,2007.WU Hao.Investigation of Vehicle Geomagnetic Detecting System and Recognizing Algorithm[D].Wuhang:Huazhong University of Science and Technology,2007.(in Chinese)
[9] 朱新平,汤新民,韩松臣.A-SMGCS航空器场面滑行初始路径规划[J].交通信息与安全,2012,30(5):27-33.ZHU Xinping,TANG Xinmin,HAN Songchen.Aircraft initial taxi route planning under the control of A-SMGCS[J].Journal of Transport Information and Safety,2012,30(5):27-33.(in Chinese)
[10] GAO H,HEUER T,DIMITROPOULOS K,et al.Safe airport operation based on innovative magnetic detector system[J].IET Intelligent Transport Systems,2009,3(2):236-244.
[11] DIMITROPOULOS K,GRAMMALIDIS N,GRAGOPOULOS I,et al.Detection,tracking and classification of vehicles and aircraft based on magnetic sensing technology[J].Int.J.Appl.Math.Comput.Sci,2005,1(4):195-200.
[12] CHARTIER E,HASHEMI Z.Surface surveillance systems using point sensors and segment-based Tracking[C].20fh Digital Avionics Systems Conference(DASC 2001),Daytona Beach,Florida,USA:IEEE,2001:14-18.
[13] STAUFFER D,FRENCH H,LENZ J,et al.A multi-sensor approach to airport surface traffic tracking[C].12th Digital Avionics Systems Conference(DASC 1993),Daytona Beach,Florida,USA:IEEE,1993:430-432.
[14] SCHONEFELD J,D.MOLLER P.F.Runway incursion prevention systems:A review of runway incursion avoidance and alerting system approaches[J].Progress in Aerospace Sciences,2012,(51):31-49.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
中国校外教育(2019年12期)2019-04-15
测控技术(2018年11期)2018-12-07
江淮论坛(2018年4期)2018-08-24
雷达学报(2018年3期)2018-07-18
福建中学数学(2016年5期)2016-11-29
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年1期)2016-02-06
西北工业大学学报(2015年4期)2016-01-19
心理学探新(2015年3期)2015-12-27
