麦弗逊悬架运动分析的空间解析法及MATLAB实现
2015-05-25 08:31陈辛波
中国工程机械学报 2015年1期
李 晏,张 姗,王 威,陈辛波,3
(1.同济大学 机械与能源工程学院,上海 201804;2.同济大学 汽车学院,上海 201804;3.同济大学 新能源汽车工程中心,上海 201804;)
悬架是车轮和车身之间弹性连接的部件,其作用是把路面作用于车轮上的垂直反力、纵向力和侧向反力以及这些反力所造成的力矩传递到车身上,并保证车轮和车身之间有确定的运动关系,使汽车具有良好的驾驶性能[1].汽车独立悬架结构的运动特性关系到汽车的操纵稳定性、乘车舒适性及底盘结构布置中的运动干涉等问题[2].车轮上下跳动时,主销内倾角、主销后倾角、车轮前束角、车轮外倾角等车轮定位参数的变化反映了悬架的运动特性,其变化规律会对整车性能产生重要影响.尤其是随着汽车行驶速度的提高,悬架运动学对操纵稳定性的影响程度显著增强.车轮外倾角和前束角对汽车的直线行驶稳定性、稳态转向特性和轮胎磨损都有较大的影响,一般都希望车辆的车轮定位参数在车轮上下跳动过程中的变化尽量小[3-4].汽车独立悬架空间运动特性分析的目的是通过建立和求解悬架的运动学模型,确定悬架机构的空间几何参数及其变化规律,这是进行悬架机构设计和分析悬架系统参数对汽车性能影响的基础[5].
目前有多种方法可以用来进行悬架运动特性分析,例如,夏长高利用多柔性体动力学方法,建立了基于ADAMS软件平台的麦式独立悬架动力学仿真模型[6];MANTARAS等结合多刚体动力学和空间机构运动学,利用Visual C++软件进行了性能分析[7];时培成等建立了3自由度的车辆模型,利用MATLAB/Simulink进行了仿真,并和试验结果进行了比较[8].麦弗逊悬架是汽车上广泛采用的一种悬架结构,因而对其运动特性的分析和结构参数的优化具有十分重要的意义.本文利用空间解析几何,提出了一种麦弗逊悬架运动特性分析方法,利用编程方法将其结果可视化,最后结合ADAMS仿真结果来验证其正确性.
1 麦弗逊悬架运动分析的空间解析法求解
1.1 悬架模型的简化
在对悬架进行运动学分析时,主要研究车轮相对车身上下跳动过程中悬架的运动学效应,即悬架随车轮上下摆动时各构件的位移变化情况.麦弗逊悬架运动分析的空间解析法可以从数学的角度给出麦弗逊悬架的运动特性.如果忽略悬架各铰点的弹性变形,根据各铰点的运动自由度,可以将麦弗逊悬架简化为如图1所示的简化模型[9].
A为悬架上端固定点球销中心,AF为减震器,所以A点的运动轨迹为沿着AF方向做直线运动.E,F,G,D,P均为转向节上的点.EH表示转向拉杆.K为下摆臂铰点,DK为悬架下摆臂.M为车轮接地点,P为车轮中心.已知A,H,K3个定点坐标和下摆臂转轴与纵轴之间的夹角α以及动点E,F,G,D,P,M的初始坐标,就可以求解出悬架运动时的运动特性.求解时,假设模型中各构件均为刚性体,构件在相对运动时不发生变形.
本节计算动点坐标采用的坐标系规定如下:平行地面车辆行驶正方向为x轴正方向;垂直于地面指向车辆上方为y轴主正方向;平行于地面指向驾驶员右侧方向为z轴正方向。
1.2 各动点坐标的计算
假设已知A,H,K,D,E,F,G,P,M点的静态坐标为A(xA,yA),H(xH,yH),K(xK,yK),D(xD,yD),E(xE,yE),F(xF,yF),G(xG,yG),P(xP,yP),M(xM,yM),角度α0.
1.2.1 悬架跳动过程中几何不变量的求解
由于D,E,F是同一构件上的点,故悬架运动过程中两两之间距离保持不变.E,H为转向拉杆两端铰点,故E,H两点距离保持不变.由于A点相对转向节的运动方向不变,所以AF和FD的夹角∠AFD保持不变,平面AFD与平面EFD夹角θ也保持不变.
悬架上下跳动时,直线AF与FD的夹角β保持不变,其表达式为

式中:l1,m1,n1为直线AF的 方 向数,l1=xA-xF,m1=yA-yF,n1=zA-zF,l2,m2,n2为直线FD的方向数,l2=xD-xF,m2=yD-yF,n2=zD-zF.
平面AFD与平面EFD的夹角θ为

式中:A1,B1,C1,D1是由A,F,D构成的平面方程A1x+B1y+C1+D1的待定系数,由式(3)展开得到.
平面AFD与平面EFD的夹角θ为

式中:A2,B2,C2,D2是由D,E,F构成的平面方程A2x+B2y+C2+D2的待定系数,由式(5)展开得到.
1.2.2 动点D的坐标求解
悬架下摆臂轴线lk的方程为

直线lk的方向数为l3=1,m3=tanθ,n3=0.
过D点垂直于lk的平面方程为

联立式(6),(7)可得Q点坐标Q(xQ,yQ,zQ),Q点是D点到轴线的垂线的垂足.即

由几何学可知,D点的空间运动轨迹为过D点垂直于平面的直线和以DQ为半径的球面的交线.由于D点的轨迹方程已知,所以当已知D点z方向坐标zDt时,把代zDt入(7),(8)就可以求出D点的动态坐标Dt(xDt,yDt,zDt).
1.2.3 动点E,F的坐标求解
设E,F点的动态坐标为Et(xEt,yEt,zEt),Ft(xFt,yFt,zFt),求出E,F点坐标就可以确定悬架的基本空间姿态.
因为F,D为同一构件上的两点,其距离保持不变.直线AF与直线FD之间的夹角β也不变.悬架在上下跳动过程中,平面AFD和平面EFD形成的平面夹角θ不变.

直线AF与直线FD之间的夹角β为
式中:l1t,m1t,n1t为直线AF的方向数,l1t=xA-xFt,m1t=yA-yFt,n1t=zA-zFt;l2t,m2t,n2t为直线FD的方向数:l2t=xD-xFt,m2t=yD-yFt,n2t=zD-zFt

在悬架运动中,平面AFD的方程为

式中:A1t,B1t,C1t,D1t为平面AFD方程的待定系数,可由式(15)展开求得.
平面EFD的平面方程为

式中:A2t,B2t,C2t,D2t为平面EFD方程的待定系数,可由式(17)展开求得:
平面AFD与平面EFD的夹角θ为
联立方程(9)—(17),即可解出E,F的动态坐标Et(xEt,yEt,zEt)和Ft(xFt,yFt,zFt).此时就可以确定悬架的空间姿态了.
轮毂、转向节、弹簧减震器可看作是一体的,因此车轮上各点的坐标都可以根据Dt,Et,Ft求出.
M点的坐标Mt(xMt,yMt,zMt)可由如下方程组求解:
同理可求得点P,G的坐标Pt(xPt,yPt,zPt),Gt(xGt,yGt,zGt).
1.3 悬架特性评价参数的确定
汽车悬架性能是影响汽车行驶平顺性、操纵稳定性和行驶速度的重要因素.悬架系统性能好坏的评价要分别从悬架动力学、悬架运动学和弹性运动学这几个方面进行评价.鉴于悬架动力学的评价方法已较为成熟,故本文仅从悬架运动学的角度进行评价.评价指标主要指反应车轮定位的参数、影响悬架产生顺从转向的参数、反映车身产生纵倾和侧倾的参数、反映轮胎回正性和转向轻便性的参数、影响轮胎磨损的轮距和轴距变化的参数.合理的车轮定位参数可以保持汽车直线行驶的稳定性,保证汽车转弯时转向轻便,而且使转向轮自动回正,减少轮胎磨损.本文选择车轮的定位参数作为悬架运动学性能的评价指标.车轮定位参数主要有主销内倾角βn,主销后倾角γ,车轮外倾角αc,车轮前束角φq等.车轮的定位参数一般会随着车轮相对于车架或车身的运动以及车轮的受力而发生变化.车轮定位参数是由悬架结构来决定的,因此,悬架设计是否合理,取决于激励状态下车轮定位参数变化是否在合理的范围内.
在确定了各坐标点的动态值之后,就可以计算分析车轮外倾角、车轮前束角、主销内倾角、主销后倾角和车轮接地点的侧向滑移.通过观察这些车轮定位参数的变化来对悬架的动态特性作出评价.
2 悬架运动特性空间解析的MATLAB编程实现
2.1 ADAMS建模优化和MATLAB编程功能实现
在ADAMA/VIEW中建模的步骤:创建新模型、设置工作环境、创建设计点、创建各零部件、添加约束和驱动,从而建立如图2所示的麦弗逊悬架模型[10].架结构进行优化的过程中,通过改变上述提及的变量来实现悬架结构的优化.

图2 麦弗逊悬架的ADAMS/VIEW模型Fig.2 ADAMS/VIEW model of Macpherson 1suspension
本文分别以下摆臂内铰点的x,y,z坐标、虚拟主销长度、主销内倾角、主销外倾角为变量,对上文提及的5个目标函数(主销内倾角βn、主销后倾角γ、车轮外倾角αc、车轮前束角φq、车轮接地点的侧向滑移量)进行逐个优化,反复迭代到每个目标函数都优化到合理的变化范围内为止[11],各变量优化后的结果如图3所示.
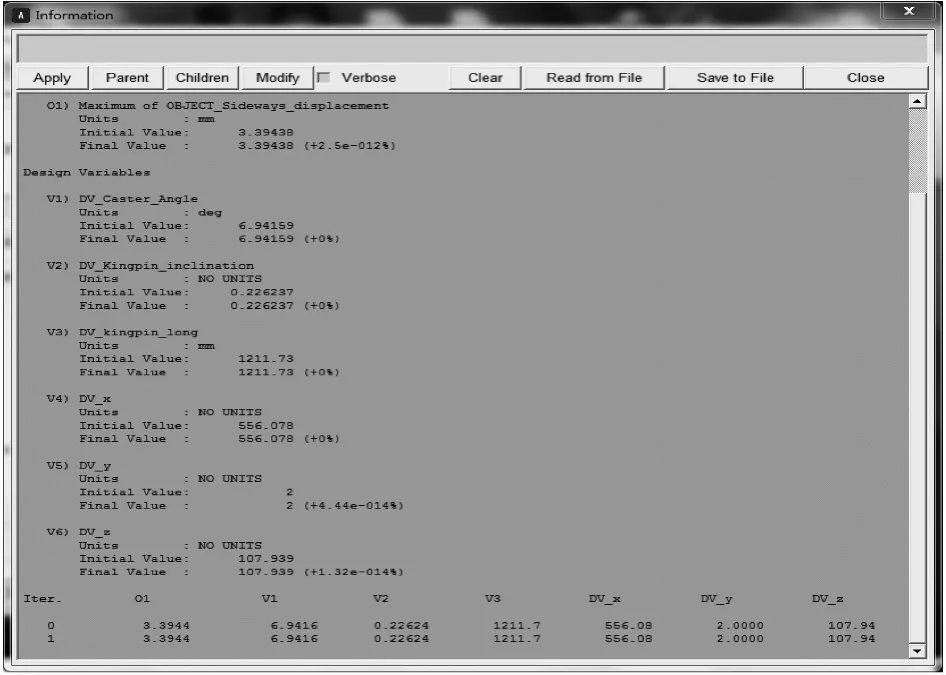
图3 各变量优化后的结果Fig.3 Results of variables optimization
如图4所示为利用MATLAB软件编程时的麦弗逊悬架运动分析空间解析法的实现过程.该MATLAB程序实现的功能:在输入激励yD=40sin(2πt)时,计算出各动点的动态坐标,进而求出各悬架的动态性能指标,并画出各性能指标随车轮跳动量的变化曲线.然后同ADAMS/VIEW中得到的性能指标图像进行对比,来验证编程的正确性.同时还可以改变各点坐标的初始值来改变悬架结构,进而对悬架进行进一步的分析.
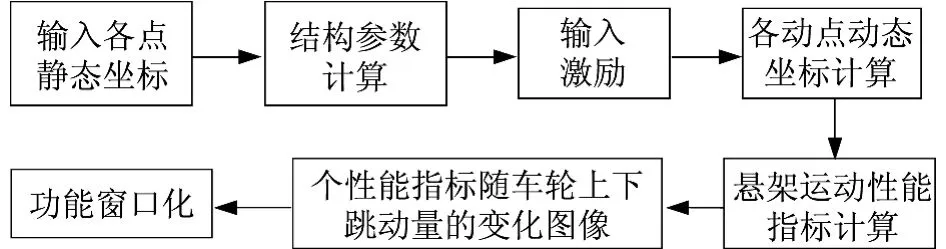
图4 MATLAB软件编程实现流程图Fig.4 Flow chart of programming by MATLAB
2.1.2 MATLAB程序窗口
通过编程实现的程序窗口如图5所示.窗口左上方是麦弗逊独立悬架结构简图;左下方区域用来显示程序图像;右上方为悬架硬点坐标初始值修改显示区域,程序启动时显示默认的各硬点坐标初始值;右下方左侧区域为画图按钮区,当数据准备完毕时,就可以单击按钮来进行画图操作;右下方右侧区域为主按钮区,如要修改悬架的硬点坐标初始值,可以通过“Default”按钮,设置悬架的硬点坐标初始值为默认值.在界面刚刚启动和修改了悬架的硬点坐标初始值时,要单击“Run”按钮进行画图的数据准备,准备完毕后会有提示,此时才可以进行画图操作.
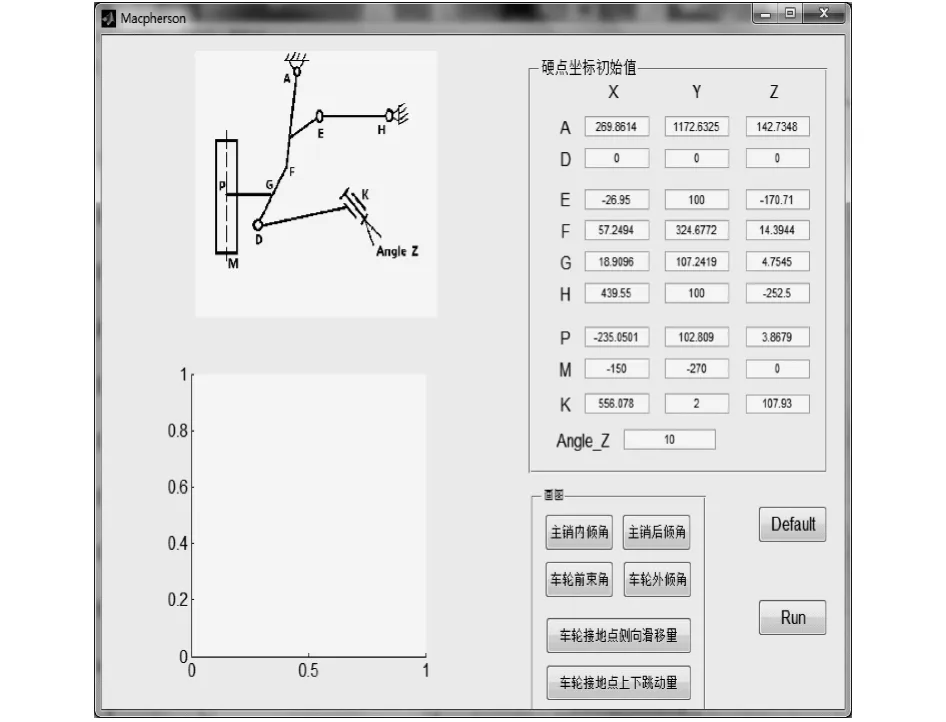
图5 MATLAB程序窗口初始化界面Fig.5 Program intialization interface in MATLAB
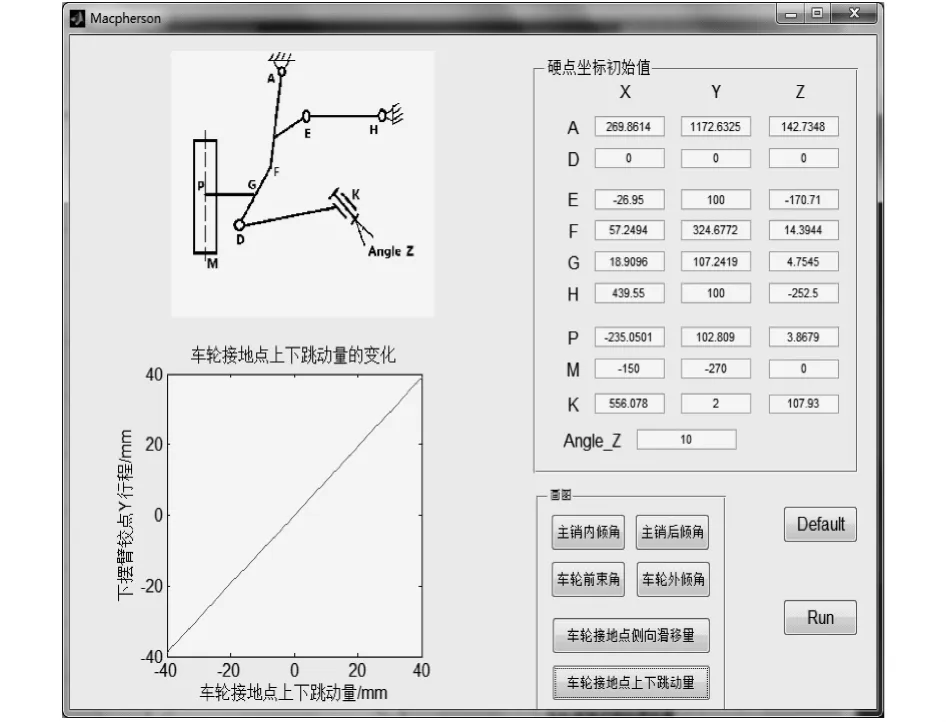
图6 车轮接地点上下跳动量随yD的变化曲线Fig.6 Curves of jerk value of wheels with yD
在本文中,激励源D点沿y轴方向做上下跳动,而通常悬架上下跳动的激励来自车轮接地点的上下跳动,在图6中可以看出车轮上下跳动量与(yD为D点沿y轴的行程)的关系近似于相同,因此可以用作为激励来研究悬架的运动特性.
2.2 MATLAB编程的运行结果分析
在程序中,设置悬架各点的坐标初始值为在ADAMS/VIEW中已经优化得到的悬架各点坐标.然后将MATLAB中通过编程计算得到的悬架运动特性曲线与ADAMS/VIEW中导出的悬架运动特性曲线在同一图中画出,相互比较,结果如图7—11.
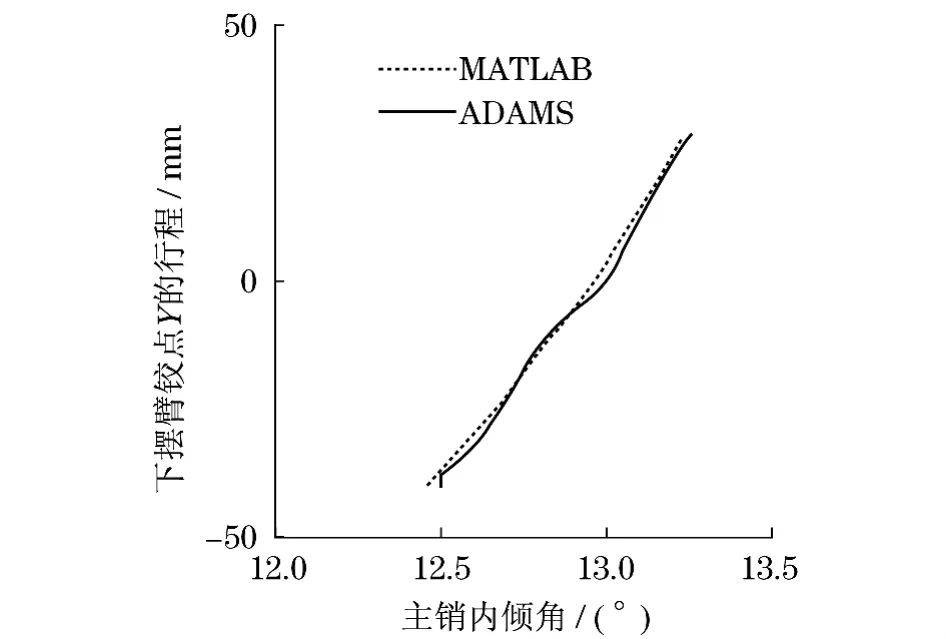
图7 主销内倾角的变化Fig.7 Changes of kingpin inclination angle
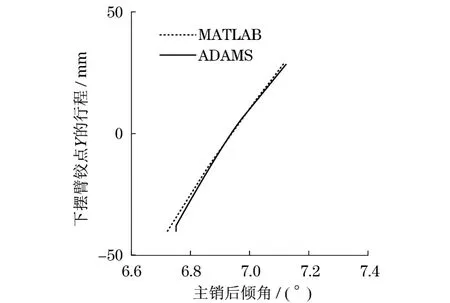
图8 主销后倾角的变化Fig.8 Changes of kingpin caster angle
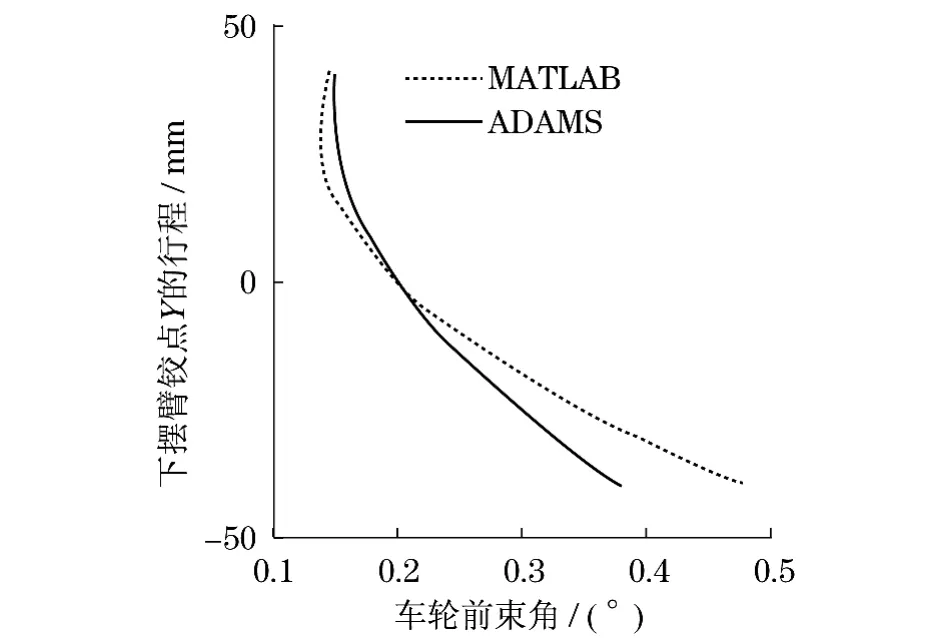
图9 车轮前束角的变化Fig.9 Changes of wheels toe angle
分析图7—11,可以看出,通过建立麦弗逊悬架数学模型和确定设计所需的参数,麦弗逊悬架运动特性分析的空间解析法可以准确分析出麦弗逊悬架的运动特性,而且其结果与ADAMS软件计算出的参数变化趋势大致相同,二者之间得到相互佐证,证明了此空间解析法和编程实现的正确性,同时说明这两种方法都是研究麦弗逊悬架运动特性的行之有效的方法,具有一定的理论研究意义和工程实用价值.

图10 车轮外倾角的变化Fig.10 Changes of wheels camber angle
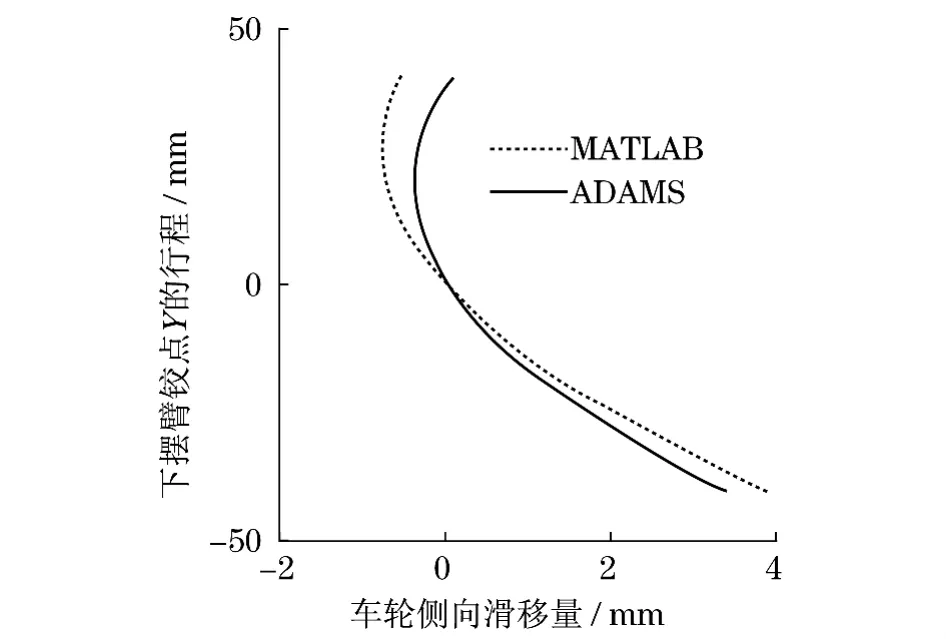
图11 车轮接地点侧向滑移量的变化Fig.11 Changes of lateral slip of wheel ground
3 结语
(1)利用ADAMS对麦弗逊悬架结构进行建模和目标函数优化,通过迭代使目标函数的变化在合理的周期范围内,然后将优化后的硬点坐标结果作为MATLAB编程的初始坐标值.使用空间解析几何法对麦弗逊悬架的运动特性进行了分析,给出了各硬点坐标点之间的数学关系以及车轮定位参数的相关表达式.通过MATLAB软件对麦弗逊运动分析的空间解析法进行编程,使程序窗口化,界面清晰直观.
(2)采用建模仿真和理论编程相结合的方法探讨了悬架的运动性能,通过图形比较可以证明此空间解析法和编程实现的正确性.
(3)利用空间解析几何,提出了一种麦弗逊悬架运动特性的分析方法,具有一定的理论意义和工程实用性.上文两种方法都能有效地用来分析悬架的特性,为工程师进行悬架结构的开发设计提供一定的参考.
[1]余志生.汽车理论[M].北京:机械工业出版社,2009.YU Zhisheng.Automobile theory [M].Beijing:China Machine Press,2009.
[2]陈家瑞.汽车构造[M].北京:机械工业出版社,2005.CHEN Jiarui.Automobile structure [M].Beijing:China Machine Press,2005.
[3]郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社,2011.GUO Konghui.Vehicle handling dynamics theory [M].Nanjing:Jiangsu Science and Technology Press,2011.
[4]管欣,逄淑一,詹军.悬架K & C特性在底盘性能分析中的研究[J].汽车技术,2010(2):4-8.GUA Xin,PANG Shuyi,ZHAN Jun.The research of suspension K & C characteristics in chassis performance analysis[J].Automotive Technology,2010(2):4-8.
[5]管欣,逄淑一,詹军.悬架运动学特性参数优化方法的研究[J].哈尔滨工业大学学报,2011(1):145-148.GUA Xin,PANG Shuyi,ZHAN Jun.The research of suspension kinematics parameters optimization method[J].Journal of Harbin Institute of Technology,2011(1):145-148.
[6]夏长高.麦弗逊式独立悬架运动特性.[J].农业机械学报,2004,06:1-4.XIA Changgao.The kinematics characteristics of Macpherson suspension.[J].Journal of Agricultural Machinery,2004(6):1-4.
[7]Mantaras D A,Luque Pe,Vera C.Development and validation of a three-dimensional kinematic model for Macpherson steering and suspension mechanisms[J].Mechanism and Machine Theory,2004,39(6):603-619.
[8]时培成,陈黎卿,韦山,等.麦弗逊式独立悬架运动分析[J].机械传动,2008(1):84-112.SHI Peicheng,CHEN Liqing,WEI Shan,et al.The kinematics analysis of Macpherson suspension [J].Mechanical Transimission,2008(1):84-112.
[9]高立新,周慧会,胡延平.基于空间解析几何的汽车麦式悬架运动学分析[J].合肥工业大学学报,2009(11):1656-1659.GAO Lixin,ZHOU Huihui,HU Yanping.The kinematics analysis of Macpherson suspension based on spatial analytic geometry [J].The Journal of Hefei University of Technology,2009(11):1656-1659.
[10]廖永升,刘拥军,陈璟,等.基于ADAMS的麦弗逊悬架运动学优化[J].科学技术与工程,2012,20:4935-4940+4950.LIAO Yongsheng,LIU Yongjun,CHEN Jing,et al.The optimization of the kinematics of Macpherson suspension based on ADAMS[J].Science Technology and Engineering,2012,20:4935-4950.
[11]雷刚.基于ADAMS的麦弗逊式悬架系统的虚拟仿真分析及其优化设计[D].武汉:武汉理工大学,2010.LEI Gang.The virtual simulation analysis and optimization design of Macpherson suspension structure based on ADAMS [D].Wuhan:Wuhan University of Technology,2010.
猜你喜欢
汽车零部件(2022年3期)2022-03-29
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
汽车工程(2021年5期)2021-06-09
科学大众·小诺贝尔(2021年10期)2021-01-22
北京汽车(2019年4期)2019-09-17
汽车实用技术(2019年16期)2019-09-11
汽车实用技术(2019年15期)2019-08-15
科技信息·下旬刊(2018年9期)2018-10-21
汽车维护与修理(2015年10期)2015-12-12