基于波形捷变的多传感器机动目标跟踪
2015-06-05 14:36王国宏张翔宇
系统工程与电子技术 2015年3期
盛 丹,王国宏,张翔宇
(海军航空工程学院信息融合研究所,山东烟台264001)
基于波形捷变的多传感器机动目标跟踪
盛 丹,王国宏,张翔宇
(海军航空工程学院信息融合研究所,山东烟台264001)
针对现代战场中目标往往采用机动方式运动的情况,为了提高目标跟踪的准确性和精确性,结合多传感器数据融合的优点,提出了一种基于波形捷变的多传感器机动目标跟踪方法。该算法通过波形捷变来改变量测的精度。首先在现有文献的基础上,将波形捷变方式推广到二维空间,把雷达量测的克拉美罗下限(Cramer-Rao lower bound,CRLB)近似为量测误差协方差,由于该CRLB是关于发射波形参量的,从而把雷达跟踪的信号处理与数据处理结合在一起,通过波形参量的动态选择得到量测误差协方差的最小值。从而在整个雷达跟踪过程中提高信噪比(signal to noise ratio,SNR),降低量测误差。其次,在数据处理上,采用多传感器数据融合及粒子滤波进一步提高机动目标跟踪的精度。最后,将该算法与传统的Kalman滤波、粒子滤波及只对一维空间的量测采用波形捷变的算法和交互多模型方法(interacting multiple model,IMM)进行仿真比较,仿真结果显示该算法对机动目标的跟踪精度显著提高。
波形捷变;机动;多传感器;克拉美罗下限
0 引 言
机动目标跟踪由于其复杂性、随机性和多样性成为目标跟踪领域研究的热点和难点,国内外众多学者致力于研究有效的机动目标跟踪算法。目前的研究主要集中在目标的运动模型和滤波算法的研究,常用的模型有多模型(multiple model,MM)、交互多模型(interacting multiple model, IMM)、切换模型等。在多模型基础上,Shalom提出了交互式多模型方法,这一方法对无序目标的机动检测显示了更好的鲁棒性和跟踪的稳定性。目标机动时其运动模型和观测模型通常是非线性的,常用的滤波方法有扩展卡尔曼(extended Kalman filter,EKF)、不敏卡尔曼(unsensitive to Kalman,UKF)、粒子滤波(particle filter,PF)等,其中,粒子滤波由于不受系统非线性非高斯的约束,已成为研究的热点。尽管现已有的这些研究都取得了一定的成效,但是大多数方法只是从数据处理方式上寻求最优的效果。而目标的跟踪精度不仅与数据的处理方式相关,也受信息的处理方式的影响,比如发射信号的波形及其参量的选择、回波信号的处理方式等。因此把信号处理和数据处理相结合是当前提高跟踪精度的研究方向之一。随着传感器技术及数字波形产生器的发展,自适应波形设计及调制也得到越来越多的应用[45],波形捷变传感器就是通过控制发射信号的波形或其参量来适应目标和周围环境。因此可以提高传感器的各项性能,如减小跟踪误差、提高检测概率、提高识别精度及提高传感器的利用效率等。文献[6-7]讨论的是一维空间没有杂波的情况下,跟踪水下目标时波形的动态选择及设计。目标的运动模型和观测模型均假设为线性,通过波形的最优设计和参量选择实现了跟踪均方误差的最小化。在文献[8]中该方法与概率数据互联相结合,实现了杂波存在下的目标跟踪。此后,Sira等人对波形捷变进行了一系列的研究,研究对象仍是水下目标[914]。文献[9]把两部声纳的量测直接合并成新的量测,然后建立量测误差的克拉美罗下限(Cramer-Rao lower bound,CRLB)方程,通过动态选择波形的参量来寻求量测误差协方差的最小值,从而提高跟踪精度。文献[10]给出3种调制波形,建立量测误差的CRLB方程,同时对波形及波形的参量进行动态选择,以使量测误差协方差达到最小。文献[11]考虑的是杂波存在条件下的目标检测问题,滤波过程采用概率数据互联处理杂波,波形捷变方式与文献[10]相同。文献[12]是波形捷变传感器在杂波存在下对多个目标的跟踪,通过动态选择4个调制波形来减小量测误差协方差,并采用联合概率数据关联及粒子滤波处理多目标和杂波问题。文献[13]基本上是对以上工作的整理总结。而文献[14]对波形的带宽进行动态选择,实现距离的量测误差协方差最小化,并把波形捷变方式应用到MIMO雷达中。尽管上述文献方法取得了一定的效果,但是其波形捷变方法都只是针对距离维的量测进行的,只考虑了对距离精度的影响,而没有考虑方位。而目标跟踪的精度与方位的量测精度有着密切的联系,尤其当目标相对雷达较远时,角度误差对跟踪精度影响较大。
由上,本文针对二维空间的距离、速度和方位量测采用波形捷变,建立3个变量的误差的克拉美罗下限方程,通过动态设计或调制雷达发射波形的参量,在一定的范围内使三者的克拉美罗下限达到最小值,并把此时的克拉美罗下限近似为量测的误差协方差,提高了信噪比(signal-to-noise ratio,SNR),并提高了距离和方位的跟踪精度。本文在数据处理上采用粒子滤波来完成目标的跟踪。另外,与上述文献方法不同,两部雷达分别进行波形捷变后再采用多传感器数据融合,使目标的跟踪结果更加精确。
1 问题描述
本文采用两部雷达对空中机动目标进行跟踪。给出跟踪过程如图1所示。
两部雷达得到量测后采用数据融合方法将结果融合,而融合的系数与二者的量测误差有关,此时的量测误差通过波形捷变进行改善,其波形捷变算法流程如图2所示。

图1 跟踪过程流程图

图2 波形捷变流程
从图2可以看出,雷达通过控制发射波形的参量优化了数据处理的效果,而数据处理又反馈指导信息层的参量选择,即把信息层与数据层相结合来提高最终的跟踪效果。因此,不但要研究数据层滤波处理时目标的状态和量测模型,还要考虑雷达发射信号的模型,并建立量测误差的克拉美罗下限方程将两者联系在一起。
2 目标运动模型
2.1 线性状态模型
目标运动状态模型由下式给出:

式中,x=(x;x,¨x,y;y,¨y)'是状态变量,包括目标在笛卡儿坐标中的位置、速度和加速度。过程噪声W=(wx,wy)'在状态上产生扰动,为高斯白噪声,有协方差矩阵Q。转换矩阵F如下:

式中,T是取样周期。
2.2 非线性量测模型

考虑目标进行机动,量测变量包括距离、径向速度和方位角,给出目标的量测方程如下:式中,h(x)是非线性量测,采用目标到雷达的距离、多普勒及方位角作为雷达量测,量测模型与状态模型存在关系如下:

式中,vk是量测噪声,也是高斯白噪声。
3 雷达发射信号模型
噪声是雷达量测精度的最主要限制。在SNR较大的情况下,并且进一步假设,和某一特定参数有关的量测误差与任何其他参数中的误差无关,精度只受接收机噪声限制,并且所有偏置误差都已分别考虑。文献[15]给出了雷达量测M的理论均方根误差δM的表达式为

式中,k是大约为1的常数;E是接收信号能量;N0是单位带宽噪声功率。
因此,雷达的距离、径向速度及角度的量测误差与k有关,而k是在固定雷达的相关参量下的值,如果对雷达参量调制就会得到不同的常量k。其中,雷达的径向速度(频率)量测精度与信号的有效持续时间有关:

雷达的距离量测精度与时延精度是一致的,而时延误差可以写成:

可以简化为

而角度的量测精度理论表达式来自时延量测精度,因为空域(角度)与频谱(频率)域数学上是相似的。因此角度量测的均方根误差为

式中,γ为有效孔径宽度,是由孔径照射(孔径上的电流分布)决定的。因此,对于不同的照射幅度,角度量测误差也是不同的,而不同的照射方式,对应的半功率波束宽度也是不同的,因此角度精度可以进一步表示为

根据上面的分析给出具有复杂高斯包络的信号形式如下:

式中,α为信号的有效持续时间;b为频率调制率;F(θ)= cos(πθ/2θ0.5),为天线方向图。由信号形式的设定可以看出不同的参量选择可以得到不同的信号波形,并通过信号层与数据层的联系来优化数据层的效果。
4 波形捷变方式
目标在空间机动,采用两个传感器进行跟踪,假设每个传感器发射的是线性调制波形,主要对其波形参量:脉冲持续时间α、频率变化率b进行动态选择。用ϕ=[α b]T表示该传感器的线性调制波形的参量,建立雷达量测的克拉美罗下限方程,该方程的变量恰好是雷达发射波形的参量,因此量测噪声的协方差可以用波形的参量表示为N(ϕ)。
4.1 建立量测误差的CLRB
雷达发射的线性调制波形s(t)如第1节给出,定义其模糊性函数[16]为

式中,τ和v分别表示波形经目标反射后被雷达接收时的时间延迟和多普勒频移;θ表示目标偏离法线的角度。这样,模糊性函数就是关于时延、多普勒和法线偏离角度等信息层变量的函数。建立3个变量的克拉美罗下限方程,因为CRLB[17]是参数估计的理想形式,即Cramer-Rao下界给出了估计的均方误差下限,实际的估计均方误差不可能再低于它。这样,可以得到3个变量估计的最优解。产生Fisher信息矩阵如下:

在理想状态τ=0,v=0,θ=0时,
式中,η为雷达的信噪比,则I-1就是参量τ、v和角度θ的估计误差协方差的CRLB。
根据距离方程及多普勒方程,雷达的量测r和r可以表示为τ和v的形式:r=cv/2;r=cv/(2fc),其中,fc为载频,而方位角的量测直接对应θ。从而建立了雷达量测误差协方差与I-1的关系式:

式中,Γ=diag(c/2,c/(2fc),1)。在进行匹配滤波时,选择使矩阵I-1最小的参量组合,此时的结果就是CRLB方程的最优解,相应得到的量测协方差为一定范围内的最小值。
4.2 最优参量组合的选择
由上面的介绍可以看出,通过波形参量的动态选择来使跟踪效果达到最佳是波形捷变的最终目的。在这里,采用序贯的方法来进行波形参量的选择。定义状态估计的误差协方差方程如下:

由于不同的波形捷变雷达发射波形的参量是有限的,并且限制在一定的范围内,因此对参量采用如下的选择方式:

式中,αmax和αmin分别为信号包络参量的最大值和最小值; bmax为波形调制的最大可能调制率。从M个α参量和N个b选择最优配对,使误差协方差最小。
由以上步骤得到最优的参量组合后,根据第3.2节给出的量测误差协方差与量测误差的CRLB的关系,得到优化的量测误差协方差,并能够有效提高SNR。把此结果应用于数据处理的滤波过程,实现跟踪精度的提高。另外,文中采用两部雷达实施跟踪,多传感器的数据融合也是数据处理的一个重要应用。
5 多传感器数据融合
多个传感器对目标跟踪[18],首先带入坐标及相对位置的问题,如果直接进行各个传感器之间繁琐的几何位置转换,势必带来复杂的误差转换,影响跟踪的精度。
假设两个雷达对目标进行跟踪,如图3所示。两个传感器对目标进行观测,得到观测值(z1,z2),采用自适应加权算法对数据进行融合,该方法的思想是在总均方误差最小的最优条件下,根据各个传感器的量测寻求各个传感器的最优加权因子。从而使融合后的目标观测值达到最优。

图3 雷达与目标位置关系图
两雷达数据仍然采用加权方式进行融合,即

则可求得总均方误差最小时所对应的加权因子为
设观测时存在观测误差εi(i=1,2),其均方误差为σi(i= 1,2),而该误差及其方差的实时值就是通过上节波形捷变计算得到。波形捷变不仅对量测误差进行实时更新,而且提高信噪比,从而可以自适应得到多传感器最优数据融合结果。
6 仿真试验
6.1 仿真条件
目标在二维空间中机动,采用两部波形捷变雷达跟踪,两部雷达位置设定为[200,975]和[0,220],目标的初始状态为X0=[1 000,100,1 000,200]T。目标的机动方式设定如表1所示。

__________________表1 目标机动的加速度设定
过程噪声协方差为

式中,设定T=1。不进行波形捷变的Kalman和粒子滤波的距离量测误差设定为150 m,角度误差设定为1°,波形捷变只对距离误差协方差进行优化的方法(文献[13])角度误差也设定为1°。假设雷达发射的为高斯包络的波形,载波的频率为fc=5 GHz,有效脉冲宽度为Ts,对所有的波形,当带宽限定为B=5 k Hz时,脉冲宽度限定在范围[0.01 s, 0.3 s]内,可进一步限定参量波形包络持续时间λ,λ=Ts/ε, ε=7.433 8;参量频率变化率b的范围限定在[-bmax,bmax],其中最大值bmax=B/(λα)。在距离r处雷达信噪比设定为SNR=(r0/r)4,则目标量测的初始信噪比设为SNR=(r0/ rt)4,r0=10 km。半功率波束宽度设定为θ0.5=3°。在参量选择过程中,式(19)、式(20)中分别取N=L=10,则参量选择时的递归次数L=(NM)2。
6.2 仿真结果及分析
首先在滤波算法上给出采用波形捷变方式与不采用波形捷变方式的跟踪效果比较。不采用捷变的方法为Kalman滤波和PF滤波方法,采用捷变的方法为本文方法(同时优化角度和距离)与文献[13](只对距离误差进行优化)给出的方法。后两种方法在数据层也都采用PF进行数据处理,但是通过信息层的波形参量动态选择来降低量测误差协方差。
仿真结果如图4~图7所示。

图4 4种滤波方法下的跟踪结果

图5 4种滤波方法下距离误差
图6 两部雷达对脉冲持续时间和频率变化率的选择(文献[13]方法)

图7 两部雷达对脉冲持续时间和频率变化率的选择(本文方法)
从仿真结果可以看出:
目标采用文中设定的机动方式时,显然由于Kalman滤波方法只适用于线性运动,因此当目标出现机动时的跟踪效果较差。而粒子滤波由于其不受系统非线性非高斯的约束,因此在机动部分呈现出较好的效果。目标的跟踪精度不仅跟数据的处理方式有关,而且与雷达自身的量测精度有着密切的关系。因此,文献[13]基于一维空间的量测(距离、速度)采用波形捷变的方式来降低雷达的量测误差协方差。从图4和图5可以看出,文献[13]的跟踪效果较只采用一种波形的PF方法要好。但是,该文献只考虑了距离精度的提高,没有讨论角度的精度,而实际上,雷达量测的角度精度对目标的跟踪精度有着更深的影响。本文基于二维空间的量测(距离、速度和方位角)进行波形捷变,来同时降低距离和角度的量测误差协方差,提高SNR。在数据处理的过程采用粒子滤波来跟踪。从图4和图5中可以看出,在本文设定的跟踪环境下,本文的方法具有更好的跟踪效果,并且跟踪精度较其他方法有显著的提高。图6为采用文献[13]方法时的参量选择。图7为采用本文方法时两部雷达的参量选择。
其次,在运动模型处理上IMM是对机动目标跟踪的一种有效方法。把本文的波形捷变方法与交互多模型进行比较。仿真条件不变,给出仿真结果如图8~图11所示。

图8 跟踪效果图

图9 距离均方误差
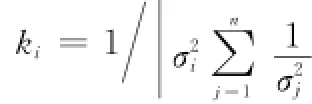
图8为目标机动时IMM方法和本文方法的跟踪效果图,可以看出IMM方法尤其在目标方向变化较大时跟踪效果不理想。图9给出了两种方法相应的跟踪距离误差。图10和图11为波形捷变时两部雷达的波形参量的相应取值。上面分别分析了不同滤波方式及不同跟踪模式下的跟踪效果,不同滤波方式和跟踪模式下信噪比的变化及多传感器融合的效果由表2给出,该结果是在初始信噪比SNR= 6.69 dB,目标真实状态为[6 196.9 m 160.45 m/s]时各方法下的滤波结果。可以看出无论是采用一部雷达还是两部雷达跟踪,基于二维空间波形捷变的跟踪方法距离精度和速度精度都有较大幅度的提高,而且其信噪比也较实际设定提高。采用一维空间波形捷变方法只是在距离维进行了改进,而其距离精度的提高也证实了方法的有效性。而当跟踪方式一定时,两部雷达信息融合的跟踪效果较单部雷达效果有所改善。

图10 波形捷变时第一部雷达的参量(脉冲持续时间和频率变化率)选择

图11 波形捷变时第二部雷达的参量(脉冲持续时间和频率变化率)选择
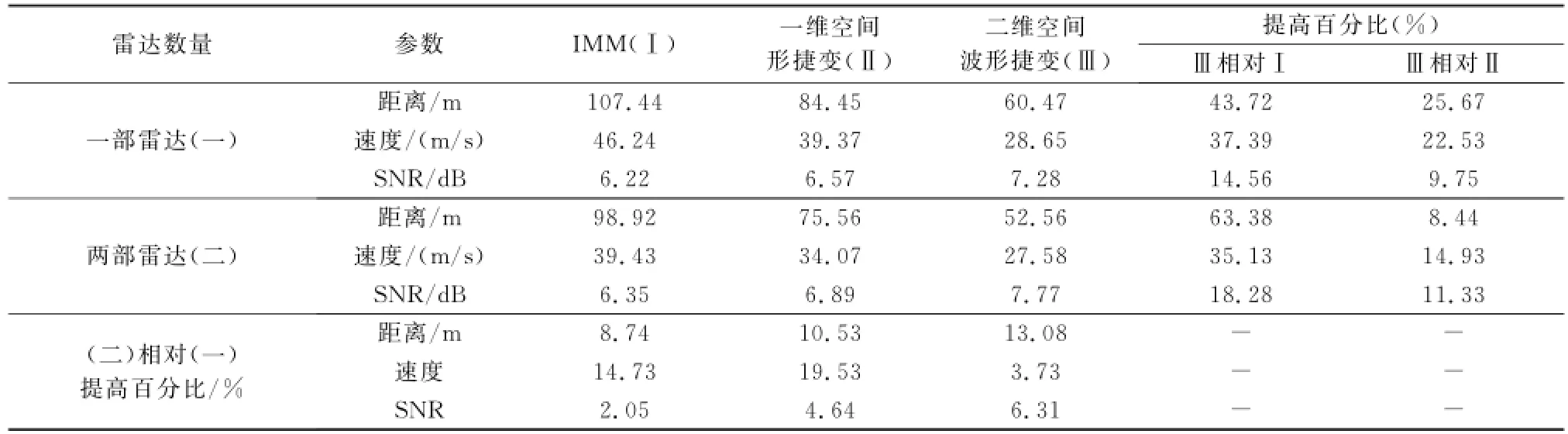
表2 跟踪模式、滤波方式及雷达数量不同时跟踪比较
7 结 论
本文研究了机动目标的跟踪问题,提出了一种基于对二维空间量测进行波形捷变的多传感器机动目标跟踪方法。该算法将雷达量测的CRLB近似为量测的误差协方差,而该CRLB是关于发射波形参量的,因此将目标跟踪的信号处理和数据处理相结合,通过适时动态选择雷达发射波形的参量来改变雷达量测的误差协方差,提高信噪比,提高对距离和方位跟踪的精度。而跟踪精度的提高又进一步指导了下一时刻信号处理时的参量选择。同时,采用多传感器数据融合及粒子滤波对机动目标进行数据处理,进一步提高跟踪效果。并在相同的环境下,将本文方法在滤波方式上与Kalman、PF、文献[13]的方法进行了比较,得到较好的效果;在运动模型方面,与经典的IMM方法进行了比较,也得到了较好的跟踪效果。
[1]Chang D C,Fang M W.Bearing-only maneuvering mobile tracking with nonlinear filtering algorithms in wireless sensor networks[J].Systems Journal,2014,8(1):160-170.
[2]Han C W,Kang S J,Kim N S.Reverberation and noise robust feature compensation based on IMM[J].IEEE Trans.on Audio, Speech,and Language Processing,2013,21(8):1598-1611.
[3]Song E,Xu J,Zhu Y.Optimal distributed Kalman filtering fusion with singular covariances of filtering errors and measurement noises[J].IEEE Trans.on Automatic Control,2014,59 (5):1271-1282.
[4]Amuso V,Blunt S,Mokole E,et al.Applications and methods of waveform diversity[M].NC:SciTech Publishing,2009.
[5]Stefania B,Andrea C,Andrea G,et al.Sensor radar networks for indoor tracking[J].IEEE Trans.on Wireless Communications Letters,2014,3(2):157-160.
[6]Kershaw D J,Evans R J.Waveform selective probabilistic data association[J].IEEE Trans.on Aerospace and Electronic Systems,1997,33:1180-1188.
[7]Kershaw D J,Evans R J.Optimal waveform selection for tracking systems[J].IEEE Trans.on Information Theory,1994, 40:1536-1550.
[8]Hong S M,Evans R J,Shin H S.Optimization of waveform and detection threshold for target tracking in clutter[C]∥Proc.of the SICE Annual Conference,2001:42-47.
[9]Sira S P,Morrell D,Papandreou-Suppappola A.Waveform design and scheduling for agile sensors for target tracking[C]∥ Proc.of the Asilomar Conference on Signals,Systems and Computers,2004.
[10]Sira S P,Papandreou-Suppappola A,Morrell D.Time-varying waveform selection and configuration for agile sensors for target tracking applications[J].Proc.of the ICASSP,2005.
[11]Sira S P,Cochran D,Papandreou-Suppappola A,et al.Adaptive waveform design for improved detection of low-RCS targets in heavy sea clutter[J].Journal of Selected Topics in Signal Processing,2007,1:56-66.
[12]Sira S P,Papandreou-Suppappola A,Morrell D.Waveform-agile sensing for tracking multiple targets in clutter[C]∥Proc.of the Conference on Information Sciences and Systems,2006: 1418-1423.
[13]Sira S P,Antonia Y L,Papandreou-Suppappola A,et al. Waveform-agile sensing for tracking[J].IEEE Signal Processing Magazine,2009,26(1):53-59.
[14]Zhang J J,Ghassan B M,Papandreou-Suppappola A,et al. Dynamic waveform design for target tracking using MIMO radar[C]∥Proc.of the IEEE Asilomar Conference,2008
[15]Skolnik M I.Introduction to radar systems[M].3rd ed.Zuo Q S, Ma L,Wang D C,et al,trans.Beijing:Publishing House of Electronics Industry,2007:238
247.)
[16]Hu GS.Modernsignal processing tutorial[M].Beijing:Tsinghua University Press,2004:98-103.(胡广书.现代信号处理教程[M].北京:清华大学出版社,2004:98-103.)
[17]Zhang M Y.Signal detection and estimation[M].3rd ed.Beijing:Publishing House of Electronics Industry,2011:31-32. (张明友.信号检测与估计[M].3版.北京:电子工业出版社, 2011:31-32.)
[18]Song E,Xu J,Zhu Y.Optimal distributed Kalman filtering fusion with singular covariances of filtering errors and measurement noises[J].IEEE Trans.on Automatic Control,2014,59 (5):1271-1282.
Maneuvering target tracking based on waveform agility with multi-sensor
SHENG Dan,WANG Guo-hong,ZHANG Xiang-yu
(Institute of Information Fusion Technology,Naval Aeronautical and Astronautical University,Yantai 264001,China)
To deal with the case that modern battlefield often has maneuvering targets,a method of maneuvering target tracking is proposed based on waveform-agility with multi-sensors to improve the veracity and accuracy of the performance.First,we establish the Cramer-Rao lower bound(CRLB)function of the measure errors of the sensors.Since the function consists of the parameters of the transmitted waveform,which can be selected adaptively,we can minimize the covariance of the measurements.Then the tracking precision is improved and the signal-to-noise ratio(SNR)is increased.The algorithm given above takes the measurements from two-dimensions space to realize target tracking.And we compare it with the conventional Kalman filtering,particle filtering and the method with waveform-agility which only has measurements from the one-dimension space.Simulation results show that the proposed algorithm provides better tracking performance.
waveform agility;maneuvering;multi-sensor;Cramer-Rao lower bound(CRLB)
TN 958.93
A
10.3969/j.issn.1001-506X.2015.03.02
盛 丹(1983-),女,博士研究生,主要研究方向为信息融合、目标跟踪。
E-mail:2855221900@qq.com.
王国宏(1963-),男,教授,主要研究方向为数据融合、目标跟踪。
E-mail:wangguohong@vip.sina.com
张翔宇(1986-),男,博士研究生,主要研究方向为数据融合、目标跟踪。
E-mail:zxy627289467@sina.com
网址:www.sys-ele.com
1001-506X(2015)03-0485-07
2014 03 13;
2014 06 12;网络优先出版日期:2014 10 17。
网络优先出版地址:http:∥w ww.cnki.net/kcms/detail/11.2422.TN.20141017.1611.011.html
国家自然科学基金(60972159,61102165,61179018);“泰山学者”建设工程专项经费资助课题
猜你喜欢
防爆电机(2020年4期)2020-12-14
空间科学学报(2020年3期)2020-07-24
现代职业教育·高职高专(2020年10期)2020-01-05
物理学报(2019年24期)2019-12-24
成都信息工程大学学报(2019年4期)2019-11-04
计算机应用与软件(2019年2期)2019-04-01
雷达学报(2018年5期)2018-12-05
雷达学报(2017年3期)2018-01-19
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16