非合作机动目标交会的相对位置控制*
2015-06-07 11:05徐李佳
空间控制技术与应用 2015年6期
徐李佳,胡 勇
(1.北京控制工程研究所,北京 100190; 2.空间智能控制技术重点实验室,北京 100190)
非合作机动目标交会的相对位置控制*
徐李佳1,2,胡 勇1,2
(1.北京控制工程研究所,北京 100190; 2.空间智能控制技术重点实验室,北京 100190)
研究目标航天器存在机动的情况下追踪航天器与目标航天器的交会问题.只利用两航天器之间的相对位置测量信息,考虑目标机动、外部干扰以及状态耦合,提出一种改进的特征压缩方式并建立相应的解耦特征模型,基于该特征模型设计解耦的自适应控制方法实现追踪航天器与机动目标航天器的交会.仿真结果验证了算法的有效性,并表明其优于传统的PD控制方法.
交会对接;机动目标;非合作目标;特征模型;自适应控制
0 引 言
空间交会对接技术(RVD,rendezvous and docking)是航天工程中的一项关键技术[1].一般情况下,目标航天器为合作目标,也就是说目标航天器配合追踪航天器来完成交会对接任务, 如保持自身轨道、姿态稳定.然而,随着空间任务需求的增加,研究非合作目标的交会对接技术是一个重要的发展趋势.所谓非合作目标是指目标航天器不主动配合追踪航天器的交会对接要求,主要分为两种情况:一种是目标航天器姿态不主动配合交会对接任务的情况[2-4],如姿态不可控制的失控卫星或小行星等; 另一种是目标航天器轨道信息未知[5]甚至自身机动[6]而不配合与追踪航天器交会对接的情况,如在交会过程中同时需要躲避空间碎片的机动目标航天器或者主动逃避交会的敌方航天器等.本文主要针对第二种目标航天器存在机动的情况进行研究,对未来复杂的航天任务和空间攻防任务具有重要的经济和军事价值.
针对在任意椭圆轨道上运行的目标航天器,通常可用T-H方程来近似描述追踪航天器与目标航天器之间的相对运动,文献[7-9]等基于T-H方程设计交会控制方法,但没有考虑两航天器所受到的外界干扰,如羽流干扰、太阳光压、地球摄动、位置姿态耦合等,本文将考虑实际交会环境中的这些干扰项.由于目标航天器为非合作对象且存在机动,能用于交会控制的测量信息非常有限,本文只利用两航天器的相对位置测量信息,设计控制方法实现交会.考虑到实际的控制系统为采样系统,因此本文基于特征模型理论进行特征建模和控制器设计.
所谓特征模型[10]是指根据对象的动力学特征、环境特征和控制性能要求相结合而建立的模型.基于特征模型的自适应控制方法主要有全系数自适应控制[11],黄金分割自适应控制[12],已成功应用于多个航天任务中,如神舟飞船与天宫实验室的交会对接任务[13],嫦娥五号飞船的返回再入任务等.然而,针对本文讨论的目标航天器存在机动的情况,在对其进行特征建模的过程中,考虑到目标航天器的机动力及各种外界干扰项并非为系统状态的函数,因此以往的特征压缩方式不能完全适用.同时考虑到两航天器交会的相对运动各个轴分量之间存在耦合,从控制的角度出发,解耦控制更为简单实用,为此本文提出一种改进的特征压缩方式,从而得到三轴解耦的特征模型,并基于特征模型设计自适应控制方法实现两航天器的交会.最后通过数学仿真验证本文所提方法的有效性,并与传统PD控制进行比较.
1 相对运动描述
考虑目标航天器所在轨道为一般的椭圆轨道, 为建立追踪航天器与目标航天器之间的相对运动, 首先定义如下两个坐标系:(1)地球惯性坐标系: 以地心为原点,xI轴和yI轴位于赤道平面内且xI轴从地心指向春分点,zI轴垂直于赤道平面且朝北,yI轴满足右手正交; (2)目标轨道坐标系: 以目标航天器质心为原点,xo轴和zo轴位于轨道平面内且zo轴指向地心,xo轴指向速度方向且垂直zo轴,yo轴垂直于轨道平面,满足右手正交.两坐标系关系如图1所示,其中rt,rc分别为地心指向目标航天器和追踪航天器的位置向量,r由目标航天器指向追踪航天器的位置向量.
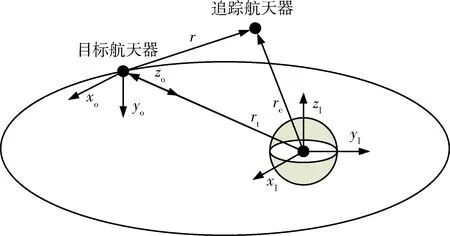
图1 相对运动坐标系Fig.1 Coordinate system for the relative motion
下面建立两航天器的相对运动方程.在地球惯性坐标系下,目标航天器和追踪航天器的运动方程分别为
(1)
(2)
式中:μ为地心引力常数,mt和mc分别为目标航天器和追踪航天器的质量,且随着推进剂燃料的消耗而变化,Ft为目标航天器的未知机动力,Fc为追踪航天器的可控推力,Ftd和Fcd分别为目标航天器和追踪航天器所受的外界干扰力,如羽流干扰、太阳光压、地球摄动、位置姿态耦合等.
两航天器在惯性坐标系下的相对位置关系为
r=rc-rt
(3)
将其转换到目标轨道坐标系中,有
(4)
其中ω为目标航天器的轨道角速度.
将方程中的向量表示成
(5)

那么可得到目标轨道坐标系中各个轴对应的方程
(6)
(7)
(8)
式中:Fcdx,Fcdy,Fcdz和Ftdx,Ftdy,Ftdz分别为追踪航天器和目标航天器所受外界干扰力的3个分量,Ftx,Fty,Ftz分别为非合作目标航天器未知机动力的3个分量,Fcx,Fcy,Fcz分别为追踪航天器可控推力的3个分量.
2 特征建模
根据上节给出的相对运动方程(6)~(8),可以看出三轴之间互相耦合,同时还带有与状态无关的不确定项(外界干扰和目标机动力).一般在工程应用中,针对各个主轴的解耦控制使用较多,具有更高的实用价值.因此本文将针对该类三轴耦合及带有不确定项的对象,建立一种解耦的特征模型,使各个轴能够独立设计控制器.
下面首先分析相对运动方程(6)~(8),可以看出各个主轴对应方程的描述形式基本一致,为便于后续分析,将其写为如下统一形式
δi(t)+b(t)ui(t)
(9)

接下来,针对方程(9)描述的各个轴的相对运动进行特征建模.由于工程中为采样系统,那么首先对式(9)进行离散化处理.采用欧拉离散化方法[11],得到各轴的离散形式为
ξi(k+1)=αi1(k)ξi(k)+αi2(k)ξi(k-1)+
βi(k)ui(k)+qi(k)
(10)
其中ξi(k)表示k时刻ξi的采样值,参数αi1(k)=2+h2ai(k),αi2(k)=-1,βi(k)=h2b(k),h为采样周期,qi(k)为k时刻总的不确定性项,由当前主轴与其他两个主轴的耦合项和扰动项组成,即
qi(k)=h2(gi(k)+δi(k)).
(11)
可见,若要得到各轴解耦的模型,那么必须对上述总的不确定项进行处理.
在以往的特征建模过程中,通常将系统的不确定项压缩到几个特征参量和特征变量中,但前提是该不确定项为状态的函数,且满足当特征变量ξi(k)→0的时候不确定项qi(k)→0,那么可以得到特征模型的标准形式.然而,针对本文这种情况是不适用的,因为不确定项qi(k)并非为状态ξi(k)的函数,也就是说当ξi(k)→0的时候不能满足qi(k)→0,若直接采用特征模型的标准形式,那么标准形式的特征模型是满足ξi(k)→0的时候ui(k)→0的,而原系统ξi(t)→0的时候不能得到ui(t)→0,因为不确定项无法消除,因此标准形式的特征模型与原系统无法等价.为解决该情况下的特征建模,本文将对特征压缩方式进行如下改进.
首先,定义一个集合
(12)其中ηi>0.接下来,将离散模型分两种情况进行处理:
第一种情况:ξi(k)∈RΩi.也就是说在这种情况下,被控对象的实际采样输出值ξi(k)远离零点,那么方程(10)中的不确定项qi(k)可以直接压缩到特征参量和特征变量中,即
(13)
其中3个特征参量为:



且上述特征参量的界满足
(14)
其中ε1j(h)>0,j=1,…,4为采样周期h的函数,且随着采样周期减小而减小.
第二种情况: ξi(k)∈Ωi.在这种情况下被控对象的实际采样输出值ξi(k)在零点附近,若依旧按照第一种情况的压缩方式进行压缩,则可能会出现特征参量特别大甚至奇异的情况,因此在这种情况下上述方式不再适用,本文为此做如下处理:首先定义一个新的特征变量ξi(k),满足
(15)
其中di为常数,一般取di>ηi.接下来,将方程(10)中的不确定项qi(k)压缩到新的特征参量和特征变量中,得到如下新的特征模型形式
(16)
其中3个新的特征参量为:



且上述特征参量的界满足
(17)
其中ε2j(h)>0,j=1,…,4为采样周期h的函数,且随着采样周期减小而减小.
通过比较式(13)和式(16),可以看出在上述两种情况下特征模型的描述形式一致, 那么写成如下统一形式:
(18)

(1)当ξi(k)∈RΩi时,

(2)当ξi(k)∈Ωi时,


可见,由式(18)给出的特征模型为各个主轴的统一形式,接下来将基于各轴对应的特征模型设计控制器.
3 控制器设计
由于各个主轴的特征模型相互解耦,因此可独立设计控制器.解耦控制相比耦合的多输入多输出控制简单可靠,因此更适合工程应用.
针对已建立的各个轴的特征模型统一形式,设计解耦的自适应控制器.考虑跟踪控制,设计的控制器由维持跟踪控制律和黄金分割控制律两部分组成,即
ui(k)=ui1(k)+ui2(k)
(19)
其中ui1(k)为维持跟踪控制律
(20)
ui2(k)为黄金分割反馈控制律
(22)

(22)
(23)
其中Di(Ωi,ξi(k))为死区函数,定义为
(24)

(25)
(26)



(27)
其中εj(h),j=1,…,4为特征参数的界,满足 ε1(h)=min{ε11(h),ε21(h)}, ε2(h)=min{ε12(h),ε22(h)}, ε3(h)=max{ε13(h),ε23(h)}, ε4(h)=min{ε14(h),ε24(h)},min和max分别表示最小最大值.
4 仿真研究
为了验证文中所提算法的有效性,下面给出一个非合作机动目标交会对接的数学仿真例子.
首先假设目标航天器所在的轨道为一般的椭圆轨道,近地点距离地球表面200 km,轨道偏心率为0.7,初始真近点角为-150°,轨道倾角为30°,升交点赤经为60°,近地点幅角为0°.假设追踪航天器与目标航天器的初始相对位置为[x(0),y(0),z(0)]=[-20,0,5] m,期望的末端相对位置为[x(tf),y(tf),z(tf)]=[-0.01,0,0] m,交会时间tf设为300 s.考虑目标航天器为非合作对象且存在机动,假设其机动力转换到目标轨道坐标系中3个轴方向上的分量为[Ftx,Fty,Ftz]=[10sin(0.08t+π/6),4sin(0.05t+π/4),8sin(0.1t+π/2)] N.假设目标航天器的质量为200 kg,追踪航天器的质量为100 kg,并考虑±10%的质量变化.同时考虑追踪航天器的推力能力,假设追踪航天器最大可控推力不超过5 N.
针对机动目标航天器的交会控制问题,只利用追踪航天器通过相对敏感器测量得到与目标航天器之间的相对位置信息,采用本文提出的基于特征模型的自适应控制方法(ACCM)控制追踪航天器交会逼近至非合作目标航天器,并与传统的PD控制方法进行比较.
图2为两航天器相对距离的变化曲线,其中虚线和实线分别用于表示采用PD控制和基于特征模型的自适应控制下的相对距离变化,两子图分别为两种控制方法下在交会末端最后100 s的细节图.可以看出,采用基于特征模型的自适应控制方法的控制效果明显优于传统的PD控制,在控制力相当的前提下,交会精度较高.图3为目标轨道坐标系中相对位置变化曲线,比较两种控制方法可以看出,解耦控制不仅使用简单而且控制效果理想,各轴控制精度都优于PD控制.图4为采用基于特征模型的自适应控制方法在目标轨道坐标系中的控制推力,满足推力限制要求.
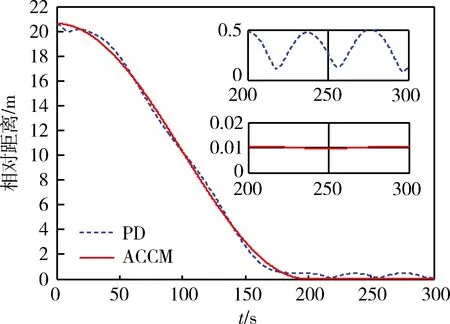
图2 相对距离Fig.2 Relative distance
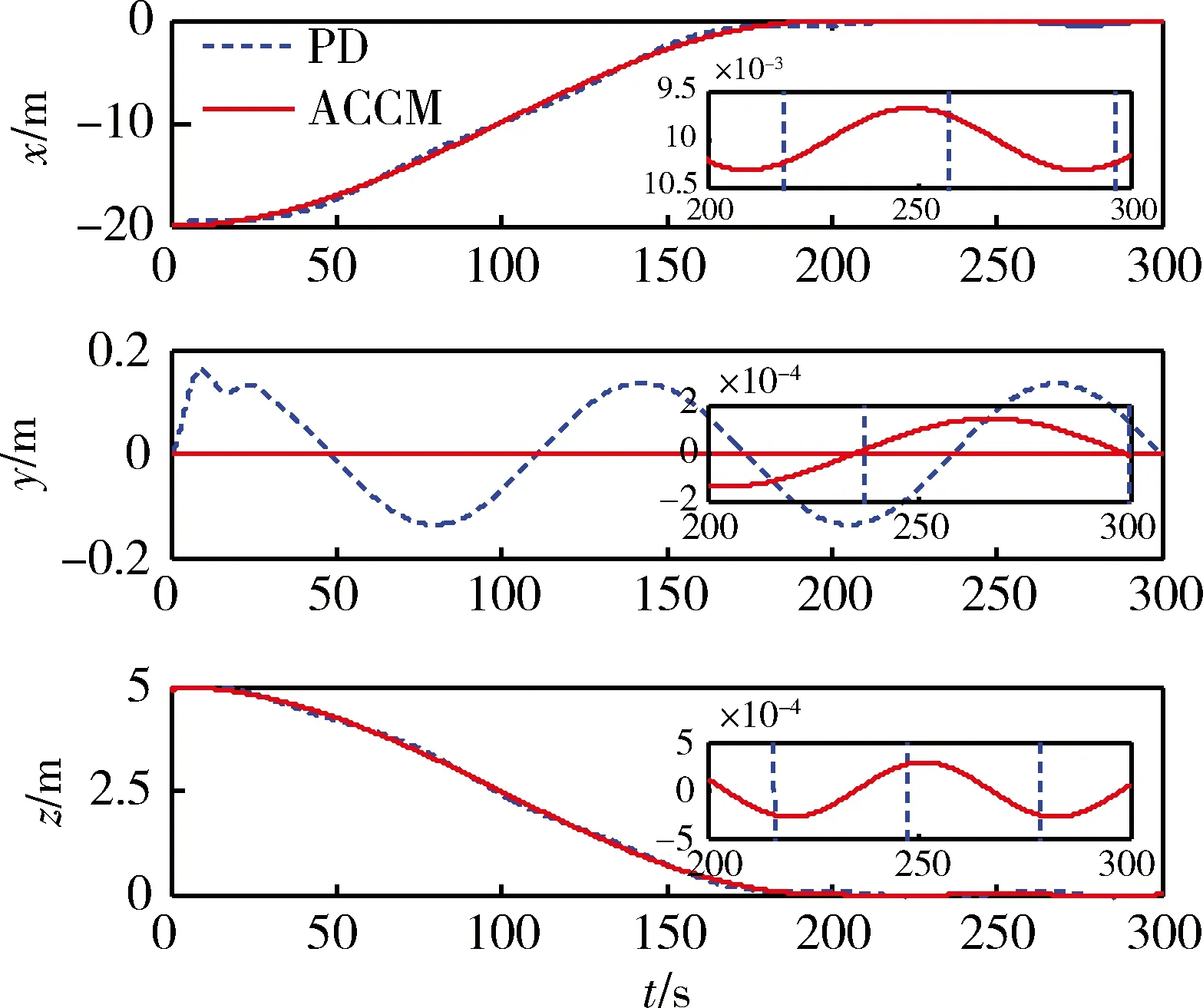
图3 相对位置Fig.3 Relative position
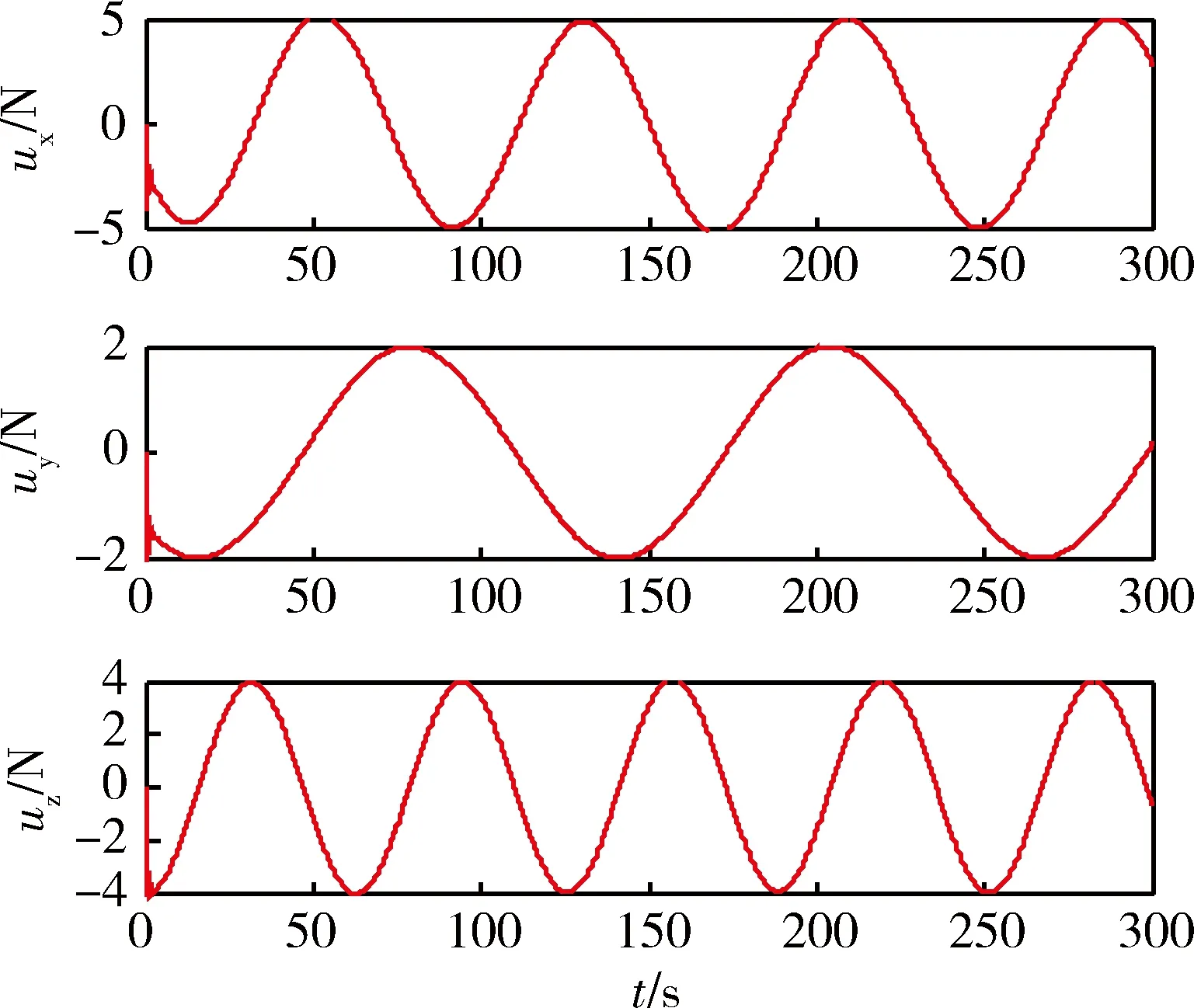
图4 追踪航天器的控制推力Fig.4 Control input of the chaser spacecraft
5 结 论
本文针对一类非合作机动目标交会问题, 设计一种基于特征模型的自适应控制方法实现追踪航天器与目标航天器的交会.首先在特征建模方面,由于存在与系统状态无关的项,因此不能进行简单的压缩,本文提出一种改进的特征压缩方式,使之能将其压缩到可辨识的特征参量和已知的特征变量中,得到解耦的特征模型.其次,基于上述特征模型和压缩条件,设计解耦的自适应控制器.在数学仿真中,验证本文所提方法的有效性及优越性.
[1] 朱仁璋. 航天器交会对接技术[M]. 北京: 国防工业出版社, 2007.
[2] BOYARKO G, YAKIMENKO O, ROMANO M. Optimal rendezvous trajectories of a controlled spacecraft and a tumbling object[J]. Journal of Guidance, Control, and dynamics, 2011, 34(4): 1239-1252.
[3] MATSUMOTO S, DUBOWSKY S, JACOBSEN S, et al. Fly-by Approach And Guidance For Uncontrolled rotating satellite capture[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Washington D.C.: AIAA, 2003.
[4] 胡勇, 徐李佳, 解永春. 针对失控翻滚目标航天器的交会对接控制[J]. 宇航学报, 2015, 36(1): 47-57. HU Y, XU L J, XIE Y C. Characteristic model based control in rendezvous and docking with a tumbling target spacecraft[J]. Journal of Astronautics, 2015, 36(1):47-57.
[5] XU L, HU Y, JIANG T. Autonomous rendezvous control and determination of unknown target orbit[C]//Proceedings of the 19thIFAC World Congress. Cape Town:IFAC, 2014, 19(1): 9709-9714.
[6] ZHOU Z. Trajectory control of rendezvous with maneuver target spacecraft[C]//AIAA/AAS Astrodynamics Specialist Conference. Washington D.C.: AIAA, 2012.
[7] SINGLA P, SUBBARAO K, JUNKINS J L. Adaptive output feedback control for spacecraft rendezvous and docking under measurement uncertainty[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(4): 892-902.
[8] ZHOU B, LIN Z, DUAN G. Lyapunov differential equation approach to elliptical orbital rendezvous with constrained controls[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(2): 345-358.
[9] LU S, XU S. Adaptive control for autonomous rendezvous of spacecraft on elliptical orbit[J]. Acta Mechanica Sinica, 2009, 25(4): 539-545.
[10] 吴宏鑫, 胡军, 解永春. 基于特征模型的智能自适应控制[M]. 北京: 中国科学技术出版社, 2009.
[11] WU H, HU J, XIE Y. Characteristic model-based all-coefficient adaptive control method and its applications[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2007, 37(2): 213-221.
[12] 孟斌, 吴宏鑫. 黄金分割控制的收敛性和稳定性研究[J]. 宇航学报, 2009, 30(5): 2128-2132. MENG B, WU H X. Convergence and stability of the golden-section control[J]. Journal of Astronautics, 2009, 30(5): 2128-2132.
[13] 胡军, 解永春, 张昊, 等. 神舟八号飞船交会对接制导、导航与控制系统及其飞行结果评价[J]. 空间控制技术与应用, 2011, 37(6): 1-5. HU J, XIE Y C, ZHANG H, et al. Shenzhou-8 spacecraft guidance navigation and control system and flight result evaluation for rendezvous and docking[J]. Aerospace Control and Application, 2011, 37(6): 1-5.
Control for Relative Position of Spacecraft Rendezvous with aNon-Cooperative Maneuver Target
XU Lijia1,2, HU Yong1,2
(1.Beijing Institute of Control Engineering, Beijing 100190, China; 2.Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China)
This paper discusses the problem of rendezvous with a maneuver target spacecraft. Considering the maneuvers of the target spacecraft, as well as the external disturbance forces and the coupled states, a modified compress method is proposed and applied to establish the decoupled characteristic model based on the measurements of relative position. Then, a decoupled adaptive control method based on the characteristic model is presented to achieve the rendezvous of the two spacecraft. Finally, the simulation results demonstrate the effectiveness of the proposed method, and indicate that the method is better than the traditional PD control.
rendezvous and docking; maneuver target; non-cooperative target; characteristic model; adaptive control
*国家自然科学基金资助项目(61333008,61304027)和国家重点基金研究发展计划(973)资助项目(2013CB733100).
2015-05-19
V448
A
1674-1579(2015)06-0013-06
10.3969/j.issn.1674-1579.2015.06.003
徐李佳(1987—),男,博士研究生,研究方向为航天控制;胡 勇(1982—),男,工程师,研究方向为航天器控制理论与控制工程.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
科学技术与工程(2021年11期)2021-05-29
当代陕西(2019年12期)2019-07-12
当代水产(2019年1期)2019-05-16
汉语世界(The World of Chinese)(2019年1期)2019-03-18
汽车文摘(2018年4期)2018-11-27
北京航空航天大学学报(2016年9期)2016-11-16
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27