六轴联动机器人在光学元件磨削中的路径控制
2015-06-08 09:58陈洪海吴庆堂聂凤明胡宝共
电子设计工程 2015年15期
陈洪海,吴庆堂,聂凤明,胡宝共,康 战
(长春设备工艺研究所 吉林 长春 130012)
工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
工业机器人由主体、驱动系统和控制系统3个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按臂部的运动形式分为4种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。
示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。在示教过程的同时,工作程序的信息即自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。示教输入程序的工业机器人称为示教再现型工业机器人。具有触觉、力觉或简单的视觉的工业机器人,能在较为复杂的环境下工作;如具有识别功能或更进一步增加自适应、自学习功能,即成为智能型工业机器人。它能按照人给的“宏指令”自选或自编程序去适应环境,并自动完成更为复杂的工作。
开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。
模块化层次化的控制器软件系统:软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性。整个控制器软件系统分为3个层次:硬件驱动层、核心层和应用层。3个层次分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。
机器人的故障诊断与安全维护技术:通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术。
网络化机器人控制器技术:当前机器人的应用工程由单台机器人工作站向机器人生产线发展,机器人控制器的联网技术变得越来越重要。控制器上具有串口、现场总线及以太网的联网功能。可用于机器人控制器之间和机器人控制器同上位机的通讯,便于对机器人生产线进行监控、诊断和管理。
1 运动学模型
工业机器人在进行磨削过程中需要磨头始终垂直于玻璃表面,这样做的目的是使工件磨削比较均匀[1]。由于玻璃平面本身的弧度不同,所以机器人在运行过程中要不断调整机器人的加工姿态,并要求速度也要保持匀速。在加工之前预先进行一次离线仿真一次,以免中途奇异点和超程报警带来的一系列的不便对工件和设备造成的损坏。
加工刀具应时时与加工点所在切平面垂直,根据刀具当前点的切平面的方程,然后通过矩阵运算方程计算出所需要的刀具姿态四元数[2],实现起来很麻烦。下面的这种方法根据数学模型建立起来的运动学模型[3]实现起来相对容易。
工件是由母线方程绕Y轴旋转一周而形成的非球面,为了保证磨削的精度,母线上点间距离与圆周运动点间距离设定相等值为d,工业机器人在作业区域内以预定速度行驶,连续轨迹运动,刀具方向与母线上各个点的切线垂直,姿态相对工件不变,旋转一周,则完成了一个圆周的磨削加工,然后根据下一个点的位置和切线的垂线方向调整工具的位移和工具摆角,以此类推就完成了整个工件的磨削过程,所要加工的曲面母线方程如图1所示。

图1 加工的曲面母线方程及母线方向步长Fig.1 Processing surface generatrix and generatrix direction step length
母线方程式为x2=a1y+a2y2+a3y3+a4y4,图中表示刀具在母线(x1,y1)、(x2,y2)、(xn-1,yn-1)、(xn,yn)4 个位置点的姿态,

式(1)中d为母线上最近两切点距离,式(2)中θ为工具摆角。
采取逐段等线段逼近的方法来接近母线。
2 预定行走路径控制流程图
工业机器人按预定行走路径控制方案,对于磨削过程建立的运动模型,利用RobotStudio对行走路径进行仿真实验。建立工件坐标系与工具坐标系[4],在此过程中考虑到工件半径较大,工件的摆放位置必须按照机器人手臂的运动范围合理放置,工件的起始姿态在保证与最高点垂直之外,还要注意各个轴参数配置,以避免轴超程[5],应用操作流程与加工程序流程如图2所示。

图2 应用操作流程Fig.2 Application process
3 仿真与分析
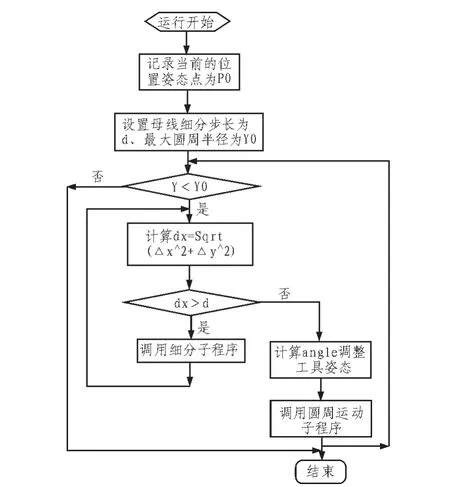
图3 加工程序流程Fig.3 Machining processes
创建实际大小的工件[6],选取轨迹跟踪。在base模块中设定工具坐标tooldata、工件坐标wobjdata、负荷数据loaddata等参数信息,主程序模块中设定间距d=0.115 mm,速度v=20 mm/s,最大加工半径Y0的大小等。同时建立回原点、自适应[7]细分步长、圆周运动等例行程序,更改系统参数配置:六轴量程为-24~24 rad,四轴量程为-24~24 rad。 更改参数后热启动控制器[8]才能生效。在行走路径上利用自适应筛选法确定步长仿真结果如图4所示,间距d的值决定线间距的大小,加工轨迹的疏密程度。如果直接细分工件横坐标x,仿真结果如图5所示。

图4 工件在RobotStudio离线仿真结果Fig.4 Artifacts in RobotStudio offline simulation results
4 结论
1)加工前进行机器人离线仿真可以预测在实际加工过程中出现的各种问题,大大提高了加工效率。
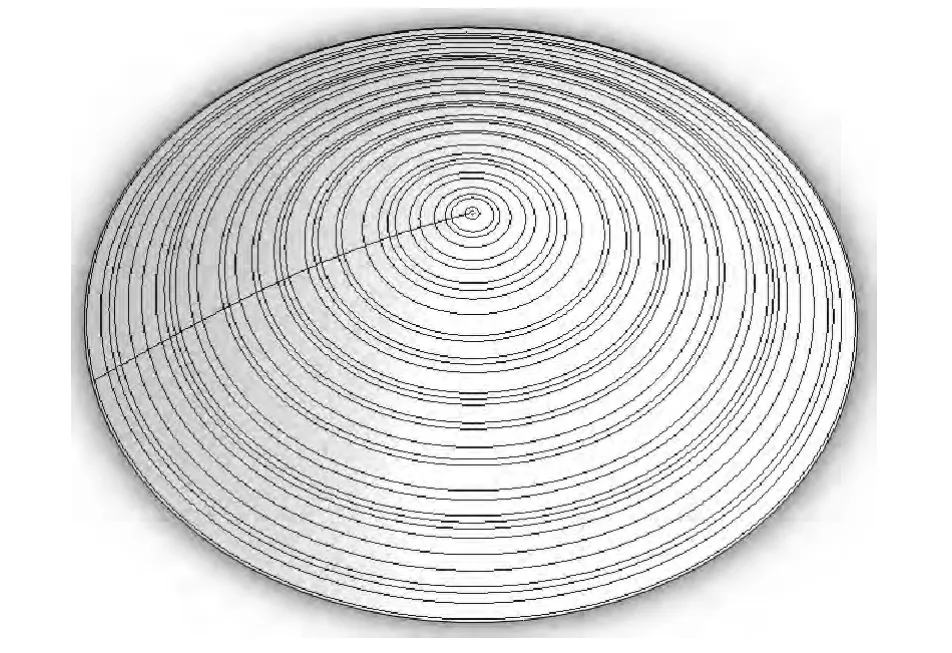
图5 工件在RobotStudio离线仿真结果Fig.5 Artifacts in RobotStudio offline simulation results
2)显然,利用自适应筛选法,使步长为等线段d逼近的方法来接近母线,要比直接细分x坐标或者是y坐标轨迹均匀的多,直接影响到加工效果。
3)工业机器人连续轨迹路径的位置和方位角精度满足了技术指标。
4)工业机器人在转弯过程中速度响应符合实际工程,其建模和仿真真实可靠,为后期的样件加工提供了技术依据。
[1]周国萍,李妍.工业机器人实操与应用技巧[M].北京:机械工业出版社,2011.
[2]张培艳,栾楠.工业机器人操作与应用实践教程[M].上海:上海交通大学出版社,2009.
[3]尔桂花.运动控制系统[M].北京:清华大学出版社,2002.
[4]宋爱国.力觉临场感遥操作机器人(1):技术发展与现状[J].南京信息工程大学学报:自然科学版,2013(1):26-30.SONG Ai-guo.Force sensing telepresence teleoperation robot(1)technology development and current situation[J].Journal ofNanjing Information Engineering University:Natu-ral Science Edition,2013(1):26-30.
[5]周帆.一类多机器人路径规划的研究与仿真 [D].南京:南京理工大学,2013.
[6]郑重虎.RoboCup3D仿真中双足机器人的运动规划与智能决策[D].南京:南京邮电大学,2013.
[7]周武能,石红瑞.自动控制原理教学改革与实践[J].教学研究,2010(1):101-110.ZHOU Wu-neng,SHI Rui-hong.Principle of automatic control[J].Journal of Teaching Reform and Practice of Teaching Research,2010(1):101-110.
[8]赵轶.基于PLC的机器人自动控制系统的设计探讨[J].硅谷,2013(8):50-55.ZHAO Yi.Robot automatic control system based on PLC design study[J].Journal of Silicon Valley,2013(8):50-55.
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
制造技术与机床(2019年7期)2019-07-22
现代装饰(2018年5期)2018-05-26
现代机械(2018年1期)2018-04-17
中国三峡(2017年2期)2017-06-09
焊接(2015年9期)2015-07-18
导航定位与授时(2014年2期)2014-04-27