
一种多方位系列化演示仪的设计与分析*
2015-06-14 09:13刘旭帅陆体文刘思毫周超超陈定方
机械制造 2015年7期
□ 刘旭帅 □ 陆体文 □ 刘思毫 □ 周超超 □ 陈定方
武汉理工大学智能制造与控制研究所 武汉 430063
产品展示伴随着经济、文化的发展而日益成为当今不可或缺的社会活动之一,对经济、生活和文化等领域都产生了很大的影响。产品展示是一个包含广泛、综合性强的活动,它与建筑设计、环境设计、工业设计、视觉传达设计、影视动画设计、电子设计、多媒体技术等多个领域有着密切联系,并在一定的空间环境内,通过视觉、听觉、嗅觉甚至触觉和味觉等多种感官,将要传达的信息有序、系统且有效地传递给观众,使观众对主办方要展示的内容产生全面的了解。
现今展示的设备多以平板简单搭建展示台为主,既不能对产品进行全方位充分的展示,也不能满足对系列化产品系统化的展示,更不能照顾到后排观众。针对现状,笔者设计了一种多方位系列化演示仪,并对其重要机构进行相关分析和仿真。
1 整体设计和工作流程
如图1所示,多方位系列化演示仪主要由剪叉机构和防摆机构组成。剪叉机构通过双向螺杆连接在一起,左右剪叉机构分别支撑着中心轴的两个轴承座,2块三角板连接在中心轴上,3个置物架通过轴固定在三角转架的3个顶点上。平行四边形机构(平行四边形机构由连杆、2个曲柄和三角板组成)与置物架的轴相连,用来保持置物架在运动过程中的水平。

▲图1 多方位系列化演示仪机构分布图
工作时,电机驱动槽轮机构(本文不赘述)带动中心轴与三角转架转动,此过程中,由于带传动与平行四边形机构的共同作用,置物架在绕中心轴旋转的同时,一直保持水平状态。当槽轮转过90°时,三角转架转动120°停下来锁死。接着,剪叉机构中的滑块在双向螺杆的带动下等速向中间移动,由此推动机架升起。
2 剪叉机构的设计与分析
2.1 剪叉机构的设计
▲图2 新型剪叉机构机构简图
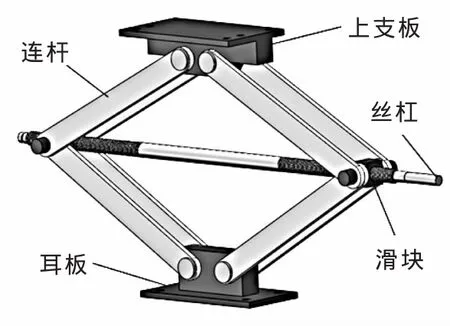
▲图3 新型剪叉机构三维模型

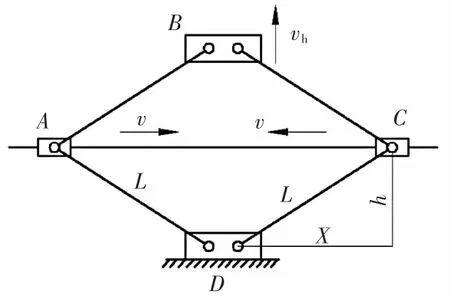
▲图4 剪叉式上升机构受力简图
常见的起升机构有剪叉式、齿轮爬升式等,由文献资料发现,剪叉式起升机构具有空间伸展性强、制造相对简单、工作稳定可靠和承载能力较强的特点。考虑到旋转装置的质量较大以及整个展示台的体积不应过大,可应用剪叉机构来实现旋转机架的上升。剪叉机构一般均用液压作为上升动力,而液压系统的设计、安装与控制比较复杂,经过思考与论证,提出了一种利用双向丝杠驱动平行四边形的两对角点而使平台上升的新型剪叉机构,四边形上下两顶点分别与上支板和底面机架铰接,而丝杠上的两滑块则将上下两连杆铰接在其一端,机构简图和SolidWorks三维模型分别如图2和图3所示。
2.2 剪叉机构的运动学与动力学分析
新型剪叉式机构的运动情况直接影响着整个机架起升的平稳性,因此有必要对其运动学与动力学特性进行分析,机构的受力简图如图4所示。
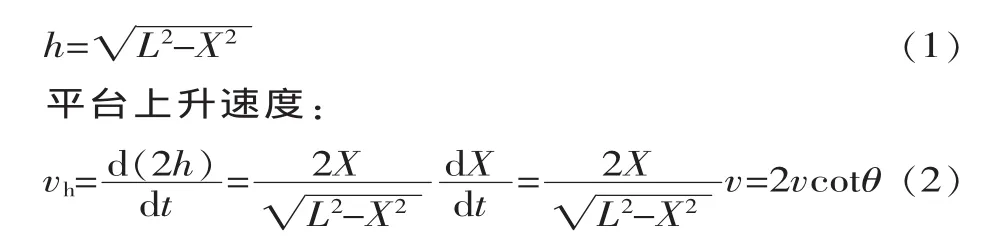
由机构简图可以得到如下几何关系:

▲图5 平台速度与加速度图
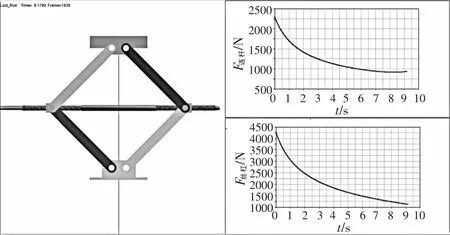
▲图6 剪叉机构受力图
将建立的SolidWorks三维模型保存为parasolid(x_t)格式,导入到ADAMS中,定义材料属性,添加约束和运动后,对新型剪叉机构进行运动学仿真,得到平台上升的速度与加速度曲线,如图5所示。另一方面,测量滑块与各杆铰点处的受力情况,得到剪叉机构在运动过程中的动力学特性,如图6所示。
从图5得出,随着丝杠的匀速转动,上支板作减加速度运动,运行情况与理论分析几乎一致,符合功能设计要求。图6既反映了连杆的受力情况,也反映了丝杠的受力情况。从仿真结果可知,连杆和丝杠所受轴向力均随θ的增大而不断减小,证明了理论分析的正确性以及该机构设计的合理性,能够满足起升功能要求。
3 防摆机构的设计与分析
3.1 防摆机构的设计
展示产品在旋转过程中,为避免其翻转而掉落,必须使展示产品在绕中心轴旋转的过程中始终保持水平。防摆机构由中心轴、三角板、箱型机架、平行四边形机构与连杆以及同步带传动机构组成。
防摆机构的虚拟样机如图7所示,在运行过程中,中心轴带动三角板一起旋转,实现所有箱型机架的防摆旋转运动。
3.2 三角转架的主要尺寸优化
三角转架运动简图如图8所示,主要尺寸包括三角转架中心轴到箱型机架中心轴的距离l以及三角转架的厚度。当l取得较大时,可以满足工作要求,而当l减小到某一确定值后,则在旋转过程中会出现箱型机架与三角转架中心轴发生干涉现象。因此以整机质量最轻、体积最小以及用料最省的优化目标对l进行优化。
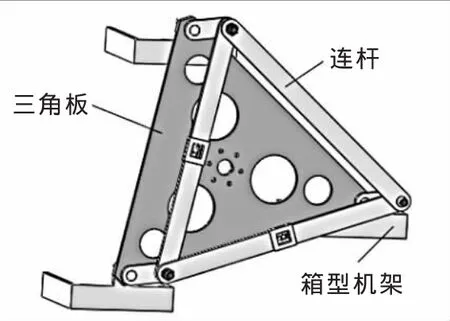
▲图7 防摆机构的三维模型
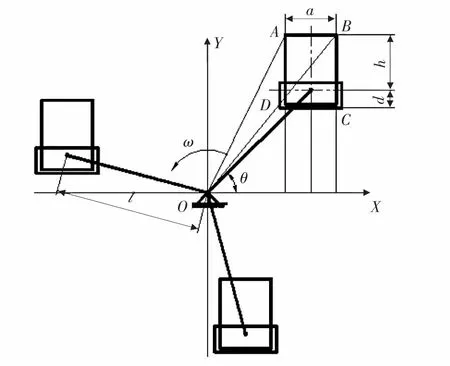
▲图8 三角转架运动简图
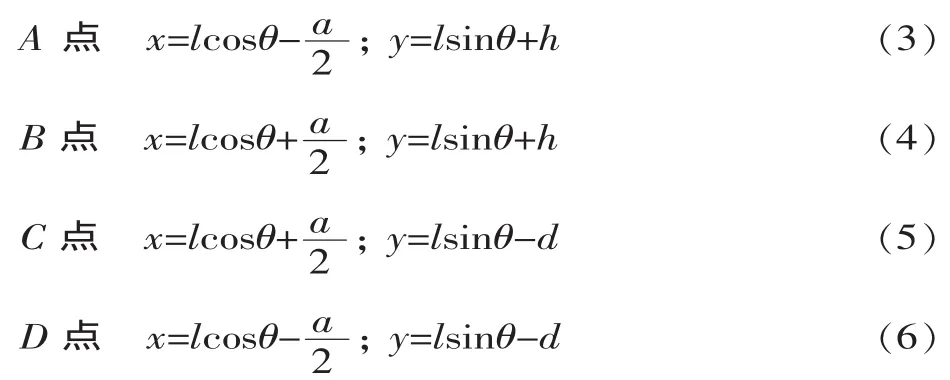
用数值方法对其进行分析,以三角转架中心轴为坐标原点建立坐标系,分析图8可以发现,只有当箱型机架上的A、B、C、D4个点在运行过程中与三角转架中心轴没有碰撞,则整个箱型机架能顺利绕三角转架中心轴完成360°旋转。经过相关几何关系的计算,可以将这 4个点的坐标用已知量 a(200mm)、h(240mm)、d(78mm)以及 l表示出来,它们分别为:
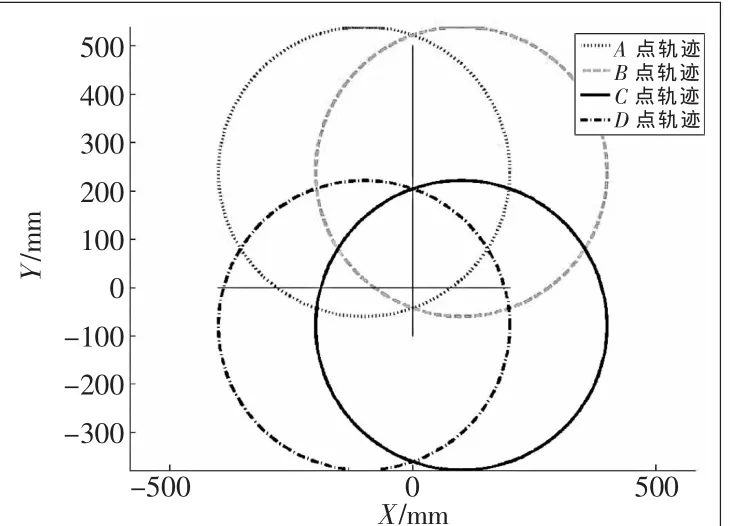
以A点为例,利用以上推导公式在MATLAB软件中绘制出其运动轨迹,为了便于对比分析,取l=300mm与200mm进行绘制,得到的轨迹分别如图9所示。
当l取200mm时,其轨迹不包括原点,说明在运行过程中,箱型机架下部已与三角转架中心轴发生干涉, 而l取300mm时,其轨迹包括原点,说明在运行过程中,箱型机架下部不会与三角转架中心轴发生干涉。由以上分析可以看出,只有当4个点的运行轨迹均包含原点时,才能满足运动条件。
利用上述分析结果,以三角转架的面积为对象建立相关优化目标函数以及约束条件,即:
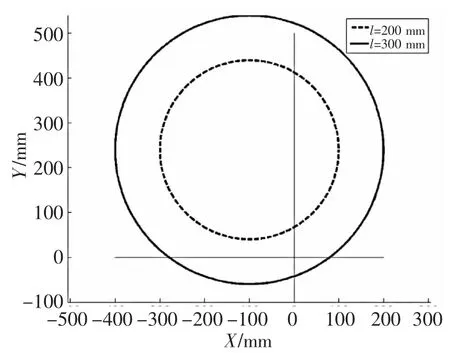
▲图9 l取不同值时A点的轨迹图
在MATLAB中编写优化目标函数以及约束条件的相关程序,以l=200mm作为初始点,采用interiorpoint优化方法进行优化,最终得到 l*=260mm,s(l*)=8.781 5×104mm2。优化后A、B、C、D 4个点的轨迹如图10所示。
▲图10 4点的轨迹图
4 总结
提出了一种多方位系列化演示仪展示装置,通过建立三维模型,对核心部分进行了结构优化和运动学、动力学分析,采用相关软件对重要构件进行仿真分析和验证,测试和验证结果表明,机械设计合理正确,能完成相关功能与要求。
[1]陈定方,罗亚波.虚拟设计(第二版) [M].北京:机械工业出版社,2007.
[2]吕庸厚,沈爱红.组合机构设计与应用创新[M].北京:机械工业出版社,2008.
[3]郑文纬,吴克坚.机械原理(第七版)[M].北京:高等教育出版社,2000.
[4]闻邦椿.机械设计手册(第五版第二卷)[M].北京:机械工业出版社,2010.
[5]袁驷.程序结构力学[M].北京:高等教育出版社,2001.
[6]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2010.
[7]彭文生,黄华梁,王均荣,等.机械设计(第二版)[M].武汉:华中理工大学出版社,2003.
[8]刘鸿文.材料力学[M].北京:高等教育出版社,2004.
[9]刘惟信.机械最优化设计(第二版)[M].北京:清华大学出版社,1997.
[10] Marcus Sandberg,Ilya Tyapin,Michael Kokkolaras,et al.A Knowledge-based Master-model Approach with Application to Rotating Machinery Design [J].Concurrent Engineering Research and Applications,2011,19(4):295-305.
猜你喜欢
家庭影院技术(2019年12期)2020-01-19
制造技术与机床(2019年11期)2019-12-04
西南交通大学学报(2016年4期)2016-06-15
工业设计(2016年4期)2016-05-04
深圳职业技术学院学报(2015年5期)2015-11-30
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
中国铁道科学(2014年1期)2014-06-21
机械制造与自动化(2014年1期)2014-03-01
机械与电子(2014年3期)2014-02-28
上海金属(2013年6期)2013-12-20
