
基于直流力矩电机的位置控制伺服系统研究
2015-06-15 15:40于宝成王春梅
武汉工程大学学报 2015年10期
于宝成,龙 冲,王春梅
1.武汉工程大学计算机科学与工程学院,湖北 武汉 430205;
2.智能机器人湖北省重点实验室(武汉工程大学),湖北 武汉430205;
3.湖北省智能焊接装备工程技术研发中心,湖北 武汉 430205
基于直流力矩电机的位置控制伺服系统研究
于宝成1,2,3,龙 冲1,2,王春梅1,2,3
1.武汉工程大学计算机科学与工程学院,湖北 武汉 430205;
2.智能机器人湖北省重点实验室(武汉工程大学),湖北 武汉430205;
3.湖北省智能焊接装备工程技术研发中心,湖北 武汉 430205
为了满足工控平台能快速,稳定控制负载位置的需求,设计了一种基于直流力矩电机的位置控制伺服系统.该系统的硬件部分主要由ARINC429通信卡、高性能DSP控制器、光电编码器、直流力矩电机和数据采集卡组成.首先通过ARINC429通信卡发送根据协议产生的通信指令,用来控制电机的转速和位置.再利用光电编码器和数据采集卡来反馈位置信息,最后在上位机上进行监控.软件部分采用labview进行编写,上下位机通过自定义的通讯协议进行数据通信,上位机发送命令到下位机,下位机接收命令并处理后将结果反馈给上位机,从而实现对下位机平台的控制.通过随动系统项目的应用测试,证明该系统功能稳定,能够满足实际项目的基本需求.
直流力矩电机;稳速控制;伺服控制;光电编码器
0 引 言
伺服系统又称随动系统,是用来精确地跟随或复现某个过程的反馈控制系统,其输出量能以一定准确度跟随输入量的变化而变化,伺服系统广泛应用于各种工业控制行业.近几年,直流伺服控制系统飞速的发展,它能直接通过控制电枢电流,来进行对转矩与转速的控制,凭借它控制简单,调速性能优异的优点,使其在工业控制中具有广泛的应用[1].因此,这里主要采用光电编码器、DSP控制器、直流力矩电机和数据采集卡等硬件来设计一个基于直流电机位置控制系统.在本系统中,主要通过数据采集卡和直流电动机来采集数据和控制负载的位置,其中直流电动机的稳定性和高精度性对整个系统参数的测量具有重大的影响.
1 工作原理
伺服控制系统接收由上位机发送给DSP控制器的工作指令,根据先前制订的通信协议来对指令进行解析,进而输出控制电机精度和速度的指令信号,最后根据解析出的信号来控制直流电动机的转动速率和角度,并将角度相关信息经过编码器和数据采集卡反馈到上位机上.同时在上位机软件上设定好采样频率,系统每隔10 ms,通过把当前经反馈得到的位置与速度值和预先设定的值进行比较,看是否在阈值范围内,如果不在,则继续按照给定的时间间隔来接受角度值,如果在阈值范围内,系统则会向电机发送停止命令.最后使直流力矩电机能精确的控制负载在给定的时间内到达预先设定的位置.在本系统中,由DSP控制器、直流力矩电机、光电编码器和数据采集卡构成反馈回路,其中负载电路,增量式光电编码器和数据采集卡相连接,通过数据采集卡来采集当前负载所在的位置和电机的速率,并能在上位机上给予友好的界面显示.其工作原理如图1所示.
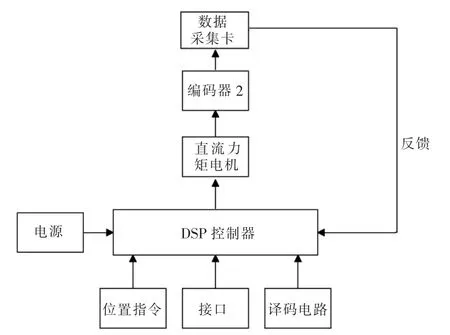
图1 系统工作原理图Fig.1 System working schematic diagram
2 伺服工作系统硬件设计
本系统硬件部分主要由DSP控制器、直流力矩电机、增量式光电编码器和数据采集卡等部分组成.系统的控制部分主要以DSP控制器为核心,利用其外围电路接口(电源模块电路、串行通信接口电路、数字模拟转换电路、增量式编码器接口电路等)来准确控制直流力矩电动机.系统利用DSP接收上位机发送过来的控制指令,通过转速电流双环调节器,利用其pwm模块和AD模块的功能来输出控制电机运动的pwm波形.将其增量式编码器接口电路与编码器相连接,将通过编码器获得的信号经过细分处理,最后反馈给上位机.以此最终完成负载的位置伺服控制,使负载的转动满足系统要求.其中利用转速电流双闭环的控制示意图如图2所示.
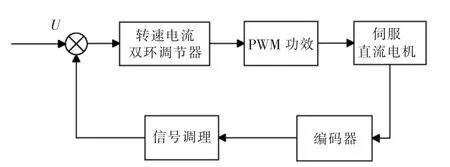
图2 直流电动机转速电流双闭环示意图Fig.2 Diagram of loop current velocity of DC motor
2.1 DSP控制器
系统采用TI公司生产的TMS320F2812型号的数字处理器.该型号处理器具有比较完善的外围控制接口和丰富的电机控制外设电路,并且指令的完成时间比较短.它具有高速信号处理和数字控制所必须的体系特点.配合pwm脉冲发生器,AD转换器和数字I/O接口等片上外设,使之为电机和其它控制领域应用的实现提供了良好的平台.本系统中,该控制器具有多达16位的模拟输入通道,具有AD转换功能.利用该控制器的pwm输出,来对速度电流环进行控制.可以通过连接光电编码器和该控制器上正交编码脉冲电路的编码和计数引脚,来获得负载的位置和速率信息.
2.2 光电编码器
光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲、数字量或模拟量信号输出的传感器.利用它可以实现角度、直线位移、转速等模拟物理量的测量[2].
由于在本伺服系统中需要根据反馈的信号来不断地调整直流力矩电机的速率和位置,因此主要利用光电编码器,数据采集卡和上位机来构成一个位置环控制.在负载机构上连有增量式光电编码器,其输出信号经过细分电路进行细分处理,通过数据采集卡采集负载俯仰、方位和消旋的变化量,在上位机上通过和初始设置的值比较来不断改变驱动信号,以此来控制直流力矩电机和负载位置的不断变化,最终达到系统的位置要求.本系统中位置环和速度环的控制相辅相成,使负载能精确,高速的到达目的位置.系统采用中国电子科技集团公司第二十一研究所生产的QA-45光电编码器,其具有重量轻、功能全、高频响应、分辨能力高、承载能力强、力矩小、耗能低等优点.光电编码器主要由精密轴系、光电码盘、红外发光二极管、光电三极管和处理电路等几个部分组成,其中光电码盘由编码码盘和狭缝码盘两个部分组成,属于核心部件.为了在负载上进行简便的安装,码盘将采用耐用、轻便的金属结构.其工作是通过光电角度传感器将轴系的角度信息转为光电信号,传至细分计数电路部件.通过细分计数电路部件对光电信号进行整形、判向、细分和计数,最终将角度信息以16位总线数据方式并行输出.
2.3 直流力矩电机
直流力矩电机是一种具有软机械特性和宽调速范围的特种电机.可以以较小输出转矩,而具有较高的输出转速,转速和输出扭力能独立进行调节,使用方便,操作简单,比一般交流力矩电机具有更高的操控性.其特点是低转速、响应快、特性线度好、过载能力强.广泛应用于各种机械制造、高精度转动系统、以及雷达监控系统上[3].本系统采用由中国电子科技集团公司第二十一研究所生产的型号为J72LY001的直流力矩电动机.
2.3.1 伺服系统电流速度闭环分析 系统为了准确快速的控制负载的俯仰、方位、消旋的位置移动,直流力矩电机运动的稳定性和精确性对负载的影响占有绝对因素.为了使负载能在最短的时间内获得最大的加速度,要发挥电动机的过载能力,并且要加大电流.同时当负载的转速达到稳态时,电流也应该快速下降,最后使电流保持恒定.因此,设计了双闭环调速控制系统.当电流快速下降时,此时是以电流负反馈为主.当需要保持负载稳定转动时,此时是以转速负反馈为主.这样可以防止电枢电流在动态过程中超过既定的允许值,从而可以使电枢电流能准确的随着控制电压指令不断的变化来准确控制电机的输出力矩,就可以使负载能以较高的精确性和稳定性达到理想位置.因此在本系统采用了两个调节器构成电流与速度的双闭环控制,从而提高试验的精确性和稳定性.
2.3.2 电机模型 由于可以通过改变电流的大小来改变直流电机的转速,从而可以对负载进行转速控制.由基尔霍夫电压定律[6]可知直流力矩电机的动态方程为:

其中Um表示电机的输入电压,Rm表示电枢电阻,Lm表示电枢电感,Im表示通过电枢的电流,w表示电机轴的转速,Ce表示电动势常数.根据动力学方程得:

其中M为电磁力矩,Cm表示为转矩常数,f表示为集中粘性摩擦系数,ML表示为负载力矩,J为电机的转动惯量.由刚体的转动定律[7],电动机轴上的运动方程式为:

其中Mf为电动机轴上的负载力矩.整理得电机的微分方程:
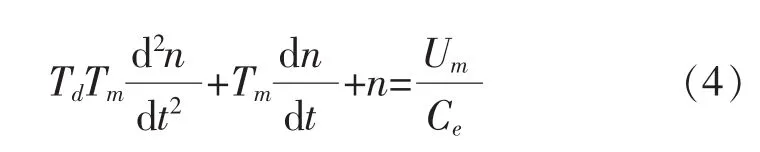
其中Td表示电枢回路的电磁时间常数,Tm表示机电常数,n表示电动机转速.
2.3.3 伺服系统电流速度闭环设计 本系统采用转速、电流双闭环调速系统.该调速系统采用三相全控桥整流电路.其中转速外环与电流内环均采用pi控制.对于电流闭环,pi调节器的传递函数为:

其中Ki表示电流调节器放大倍数,τi表示电流调节器时间常数.
根据直流电机参数τi=T1=0.036 s,整流装置滞后时间常数Ts=0.001 7 s;取电流滤波时间常数Toi=2 ms=0.002 s,电流环时间常数之和 T∑i=Ts+Toi=0.003 7 s.
由于要求δi<5%,所以应取KIT∑i=0.5
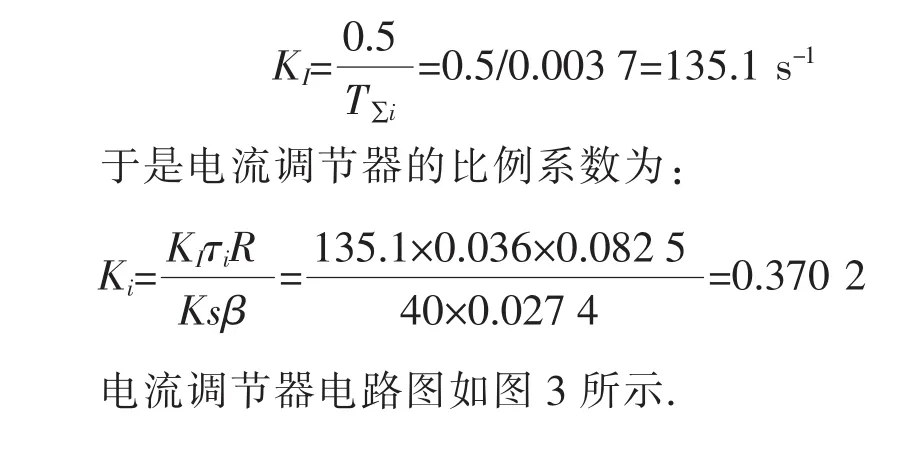
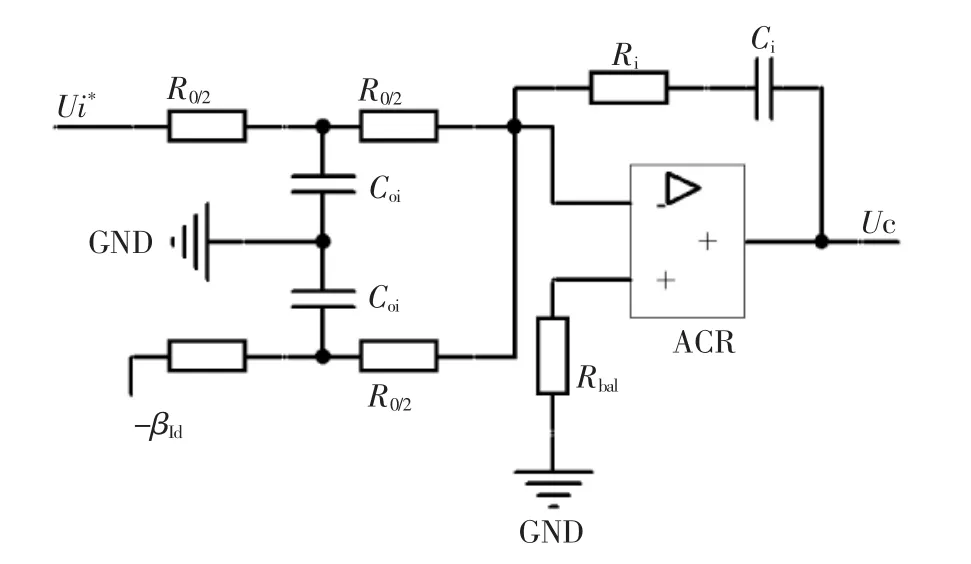
图3 电流调节器电路图Fig.3 A circuit diagram of the current regulator
对于转速闭环,pi调节器的传递函数为:

其中Kn表示速度调节器放大倍数,τn表示速度调节器时间常数.
电流环等效时间常数1/Ki.由前述已知,KIT∑i=0.5.则
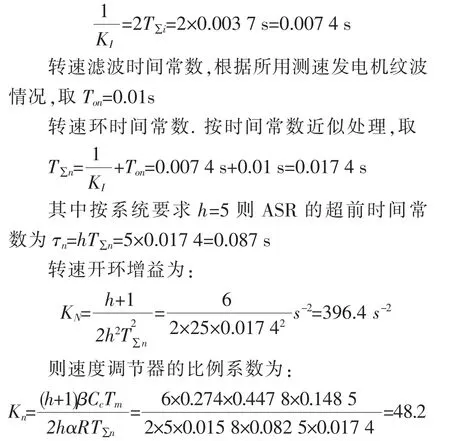
其中转速调节器电路图如图4所示.
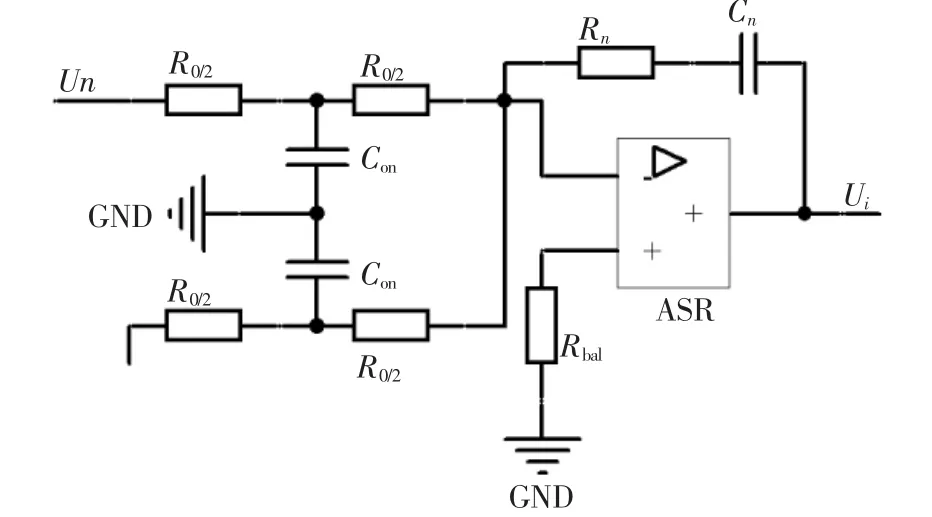
图4 转速调节器电路图Fig.4 Speed regulator circuit diagram
根据上述电流、速度闭环控制系统的结构图如图5所示.
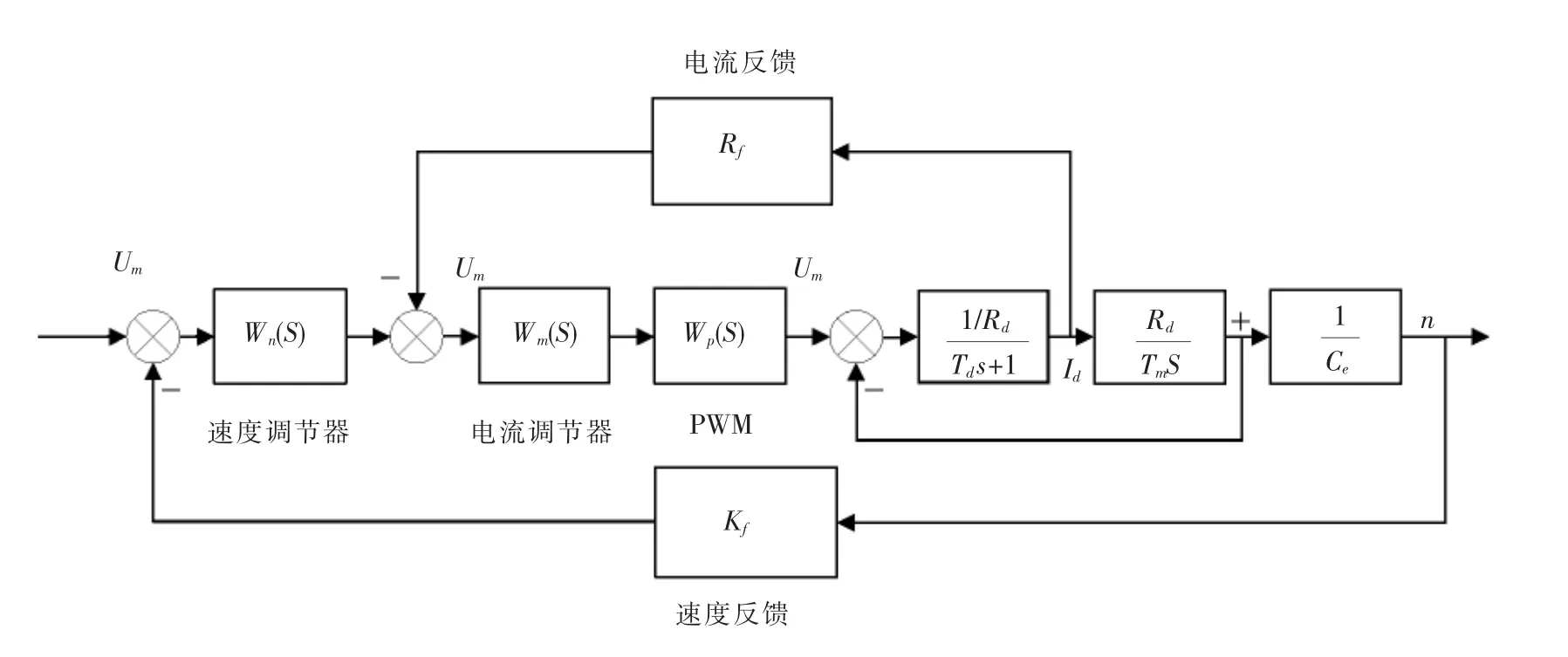
图5 电流、速度双闭环控制系统结构图Fig.5 Structure diagram of the current and speed dual-loop control system
3 伺服控制系统的软件设计
上位机软件采用labview进行编写.Labview可以提供给用户友好的界面,并且在测试测量,控制领域方面具有突出的优点,能够图形化显示数据的采集和分析过程,也能对数据和负载状态进行图形化的管理.其编程风格也是简单方便,能充分满足本系统的测试要求.并且,本系统将测试采集的不同任务划分在不同模块中,可以根据用户要求来简单的增加不同的功能模块.本系统软件流程图如图6所示.
本软件首先输入初始位置和初始速度指令来控制电机运动.通过细分电路板将传输到编码器的光电信号转换成数字信号.由采集卡进行采集,将收到的数字信号转换成角度并在电脑上能实时显示.根据角度的变化和比较,在重新生成新的电机运动命令来控制电机运动,使电机到达最终想要的位置和速度.
本软件的伺服控制模块的控制框图如图7所示.通过该模块可以很好的控制负载在不同方位的运行位置.
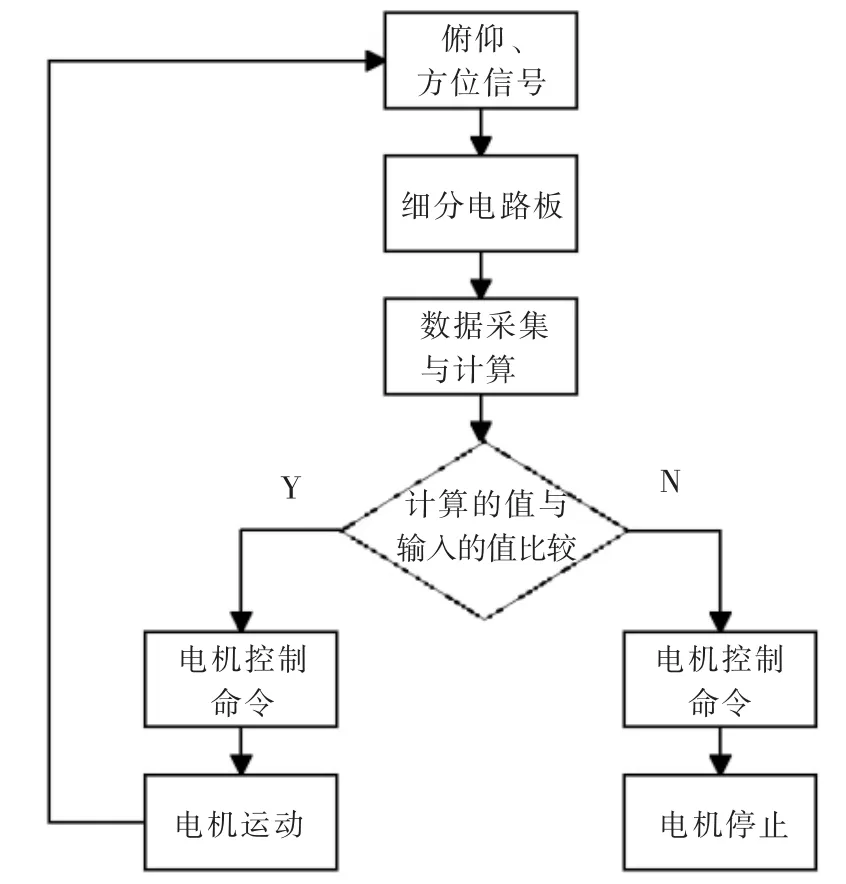
图6 伺服系统软件流程图Fig.6 Software flow diagram of servo system

图7 伺服控制模块框图Fig.7 The block diagram of Servo control
4 结 语
上述伺服系统是利用转速、电流双闭环控制回路来控制直流电动机,采用高精度的光电编码器、细分电路板和数据采集卡来实现俯仰,方位和消旋方向的位置闭环控制.经过测试,该伺服系统能够满足用户需求,并且运行稳定,各项参数也达到目标要求.同时,这也为今后开发更高性能的伺服系统提供了研究基础.
致谢
感谢湖北省教育厅科学技术研究项目提供的资金支持!
[1] 张晓青,栗书贤.永磁式直流力矩电动机稳速系统设计[J].微特电机,2001,2(3):50-56.
ZHANG Xiao-qing,LI Shu-xian.Designed of a torque motor system of Permanent magnet DC [J].Micro motor,2001,2(3):50-56.(in Chinese)
[2] 尹翔陵,王爱祥.直流力矩电机在精密跟踪雷达中的应用[J].电子工程师,2001,27(1):55-57.
YIN xiang-ling,WANG Ai-xiang.The Application of DC motors used in precision tracking radar[J].Electronics Engineer,2001,27(1):55-57.(in Chinese)
[3] 赵政春,邱飚.ATP系统伺服平台的研究[J].机床与液压,2009,6(23):25-27.
ZHENG Zhen-chun,QIU Biao.Research on platform of ATP servo system [J].Machine Tool& Hydraulics,2009,6(23):25-27.(in Chinese)
[4] 温照方.电机与控制[M].北京:北京理工大学出版社,2004.
WEN Zhao-fang.Motor and control.[M]Beijing Institute of Technology Press,2004.(in Chinese)
[5] 李汉舟,杨世超.基于模糊PID的直流力矩电机转速控制[J].中国惯性学报,2004,6(3).80-84.
LI Han-Zhou,YANG Shi-chao.The research of DC torque motor speed control based on fuzzy PID[J].Journal of Chinese Inertial,2004,6(3):80-84.(in Chinese)
[6] KiyoshiOhishi,TomoniriMashimo.DigitalRobust Speed Servo Systemwith Complete Avoidance of Output Saturation Effect[J].Power Conversion Conference,1997(1):501~506.
[7] STEPHAN R M,HAVN V,UNBEHAUEN H.Cascade adaptive speed control of a thyristor-driven DC motor[J].IEE processing,1988,135(1):49-55.
Servo system of stable speed control based on direct current torque motor
YU Bao-cheng1,2,3,LONG Chong1,2,WANG Chun-mei1,2,3*
1.School of Computer Science and Engineering,Wuhan Institute of Technology,Wuhan 430205,China; 2.Hubei Key Laboratory of Intelligent Robot(Wuhan Institute of Technology),Wuhan 430205,China; 3.Hubei Province Intelligent Welding Equipment Technology Research Center,Wuhan 430205,China
To make the industrial platform control the motor position fast and stably,a servo system of steady speed control based on direct current torque motor was designed.The hardware part of the system consists of a high-performance DSP controller ARINC429 communication cards,photoelectric encoder,direct current motors and data acquisition cards.ARINC429 communication cards were utilized to communicate the data. The optical encoder and data acquisition cards were used to collect and feedback position information,and the position information was lastly monitored by the upper computer.The software part was written by the language of labview.A self-define communications protocol was applied to serial communication for the upper platform and the lower platform.The upper computer sent commands to the lower computer,and the lower computer
commands and gave feedback to the upper computer after processing,enabling control of the lower platform.The application test results show that the system is reliable and can meet the basic needs of the actual project.
direct current torque motor;stable speed control;servo control;photoelectric encoder
TP275
A
10.3969/j.issn.1674-2869.2015.10.008
本文编辑:陈小平
1674-2869(2015)10-0040-05
2015-08-25
于宝成(1974-)男,河南新乡人,副教授,博士.研究方向:智能机器人,机电系统智能监测与控制.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
中国测试(2022年2期)2022-03-19
中国临床护理(2019年5期)2019-09-21
宇航计测技术(2018年3期)2018-09-08
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
网络安全与数据管理(2016年4期)2017-01-10
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
汽车与新动力(2015年1期)2015-02-27
