
虚实结合的X-Y数控实训平台设计
2015-06-23 12:20丁明亮丁金华王德权李明颖宗井彬
实验技术与管理 2015年3期
丁明亮,丁金华,王德权,高 腾,李明颖,宗井彬
(1.大连工业大学机械工程与自动化学院,辽宁大连 116034;2.北京中电华强焊接工程技术有限公司,北京 100076)
虚实结合的X-Y数控实训平台设计
丁明亮1,丁金华1,王德权1,高 腾1,李明颖1,宗井彬2
(1.大连工业大学机械工程与自动化学院,辽宁大连 116034;2.北京中电华强焊接工程技术有限公司,北京 100076)
虚实结合的X-Y数控实训平台由接口电路板和运行在计算机上的虚拟设备构成。采用网络连接,基于UDP协议进行上下位机的通信。接口电路板以STM32F103C8RBT6为控制核心作为下位机,完成脉冲检测、继电器输出、网络通信等功能;虚拟机基于C#开发,完成高速数据交换,界面有动画效果的电机、丝杠、工作台、限位传感器等虚拟组建构成。上下位机虚实结合,实现接口电路板引出端子的电气特性完全等效真实的X-Y工作台驱动接口的电气特性。
虚拟机电装备;实训平台;X-Y数控平台;ENC28J60
高校工科专业的特点是实践性强,实验和实训在教学中占有举足轻重的地位,它们是培养学生动手能力、创新能力和解决工程实际问题能力的重要手段[1]。为解决学校实训设备数量或实训工位不足、实训设备落后且不能与企业对接等问题,很多学校已将虚拟仿真技术应用于实践教学中。然而,单纯的虚拟仿真并不能完全达到真实设备的技能训练效果[2]。
使用机电一体化技术的数控机械如数控机床、绘图机、火焰切割机、电加工机床以及衣料开片机等,都有一个可在X-Y平面内作复合位移的工作台。这种工作台通常与整机设计成一个整体,其工作原理有着共同的特点[3]。因此,X-Y数控平台是学生学习PLC、嵌入式、计算机等控制系统的典型机电一体化设备。虚实结合的X-Y数控实训平台留有真实的机电设备驱动接口,而将机械动作过程进行动画演示。在这个过程中,学生需要实际动手完成控制系统电路的搭建、编写程序代码,而控制系统发出的指令通过接口电路、通信系统传递给电脑,电脑软件仿真出机械的动作。这种虚实结合的实验仪器设计,不仅可节约实验室建设费用,而且可以达到预期的实验教学目的[4]。
1 工作原理
X-Y数控平台采用伺服电机或步进电机驱动,经过齿轮减速和丝杆传动后,带动工作面做平面任意方向的运动[5]。控制对象是以步进电机(伺服电机)、滚动丝杠、导轨座、滑动导轨副、工作平台等组成的十字工作台[6](见图1(a)中虚线内的部分)。X-Y数控平台结构包括控制机构和执行机构两部分,执行机构包括了机械部分和接口电路。
虚实结合的X-Y数控实训平台用虚拟软件取代执行机构,设计了与真实设备相同的电气特性接口(图1(b)虚线内的部分)。由于控制系统无法区分它所控制的机构是真实的X-Y工作台还是虚拟的X-Y工作台,因此实验人员需要进行真实的控制系统的设计、代码编写、连接线等实验操作。虚实结合的X-Y数控实训平台的组成见图2。接口电路板将控制信号通过网络传输给计算机处理,计算机软件模拟X-Y平台的动作,并将虚拟限位传感器信号送达接口电路板,由接口电路板控制继电器实际模拟限位信号。
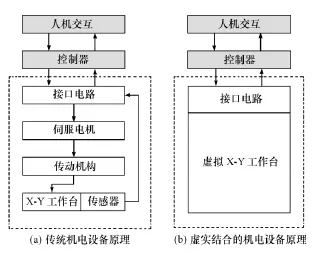
图1 虚实结合X-Y数控平台原理图
接口电路实现4路脉冲输入、通过拨码开关切换成2路脉冲加方向的模式,控制2个虚拟的伺服电机精确地移动工作台。接口电路板有4路继电器输出,分别表示X轴方向的2路限位开关和Y轴方向的2路限位开关,还有其他扩展输入端口。这样接口电路板的接口与真实X-Y工作台的接口完全一样,达到控制机构完全真实而执行机构仿真演示。

图2 虚实结合X-Y数控平台
2 硬件设计
接口电路板是完成虚实结合的桥梁,是控制机构与执行机构、现实系统与虚拟系统的接口,用来完成脉冲信号和拨码开关信息的检测、与虚拟机通信并处理虚拟机反馈的信息。整块电路板由STM32C103RBT6最小系统电路、脉冲输入检测电路、拨码开关选择电路、继电器驱动电路、网络通信接口、电源管理电路等6部分构成,另外还有下载以及程序调试电路、控制系统连接的可插拔端子。
2.1 STM32C103RBT6最小系统电路
使用意法半导体公司生产的STM32C103RBT6作为控制核心,实现信息检测、数据运算、与上位机的通信。该单片机采用ARM 32位的CortexTM-M3 CPU,具有0等待周期的存储器、单周期乘法和硬件除法、支持定时器和SPI等外设的特点。输入通道自带滤波寄存器实现硬件去除脉冲毛刺,减少错误脉冲识别,降低了软件程序编写的复杂度。其电路如图3所示。
供电线路寄生阻抗产生的电磁干扰、门电路开关瞬间电流的跳跃式变化、电源线的电感阻止电流的瞬态变化,这3种情况都将影响集成芯片的响应速度[7]。在芯片引脚的电源与地之间加去耦电容(decoupling capacitor)可以防止和减轻这些干扰。
最小系统的复位电路有内部上拉电阻,仅当复位引脚直接接地时系统复位。复位引脚外接下拉电容提高电磁敏感度(EMS),防止寄生复位。STM32一般选用2个容值为10pF的陶瓷电容作为晶振负载电容,负载电容会影响晶振的频率和振幅,而过大的负载电容会造成晶振起振困难,甚至不能起振。电源的去耦电容选用0.1μF的陶瓷电容,这些电源的去耦电容在电路板布图时一定要尽可能靠近单片机电源引脚。系统采用串行线调试接口(SWJ),PA13脚用作数据输入输出口,PA14用作串行时钟(SWCLK),SWJ同样可以进行在线仿真调试。

图3 STM32F103RBT最小系统原理图
2.2 脉冲输入检测电路
为了防止外部系统的不当操作对系统电路造成不可逆转的破坏,采用了光电隔离技术。光耦将接口电路板与学生设计的控制机构分开,避免了需要公共地的问题,并且极大地降低了光耦隔离的两部分噪声信号的相互影响。光耦的内侧设计LED指示灯,当外部有脉冲输入时,光耦输入端接通,最小系统的PWM引脚拉低,同时指示灯LED点亮。当外部脉冲输入低电平时,光耦输入侧断开,此时PWM引脚会检测到高电平,同时指示灯LED熄灭。外部输入的脉冲高低变化时,指示LED闪烁,PWM引脚有边沿跳变,单片机由此检测学生设计的控制机构产生的脉冲输入或者方向信号的电平变化。
脉冲输入检测电路如图4所示。经过测试,光耦输入电流在5mA时可满足设计的性能要求。根据EL357N前端电压与前端电流特性曲线[8],此时输入端压降UF约为1.12V,于是假设控制机构信号高电平规定为UINH等于5V,则在原理图中根据公式(1)式可以计算出限流电阻R22约为776Ω,根据标准电阻表选用820Ω的电阻。

图4 脉冲输入检测电路原理图

式中:R22为光耦输入前端限流电阻;UINH为控制机构脉冲信号高电平;UF为光耦前端输入电压;IF为光耦前端输入电流。
当控制机构的高电平UINH大于5V时,需要根据公式(1)选取适当的限流电阻串接在电路中,否则过高的电流会降低光耦的性能,甚至使光耦失效。
2.3 继电器驱动电路
继电器输出开关量模拟限位传感器传出的信号。控制机构检测这些信号并作出合理决策,如停止工作台的运动等。光耦驱动三极管,三极管驱动继电器,小电流驱动大电流。继电器并联LED作为继电器当前状态的指示(见图5)。
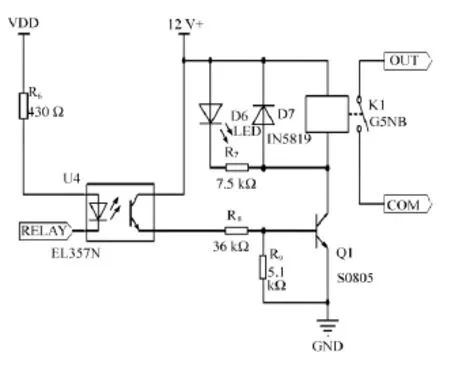
图5 继电器输出电路原理图
红色指示灯D6在电流0.77mA可以满足亮度要求,此时压降为1.76V。继电器选用欧姆龙的G5NB-1A12VDC,额定电流16.7mA[9]。为使三极管Q1导通时工作在饱和状态,基极电流不小于Ic/β,Ic是三极管集电极电流,β是三极管放大倍数。二极管D7在三极管截止时用于构成继电器线圈的放电回路。
2.4 网络控制器及接口
基于串口传输的RS232、RS485等通信总线虽然硬件电路、软件编程简单,但一般传输速率在9 600 bit/s,很难达到虚实结合的X-Y数控实训平台数据通信的要求。USB总线可以实现高速率的数据传输,但是在组网、系统扩展方面有欠缺。
ENC28J60是美国微芯科技公司推出的28引脚独立以太网控制器,兼容IEEE802.3协议,与微控制器的连接采用10Mbit/s的业界标准SPI接口,既能提供以太网通信的功能,又可以大大简化设计、减小空间、降低成本[10]。单片机通过SPI接口完成网络控制芯片的参数配置和进行数据交换。选用带有网络变压器的HR911102A作为网络接口,通过差分信号实现数据帧快速收发。要实现以太网接口,ENC28J60需要外部连接几个标准元件(见图6)。

图6 ENC28J60电路原理图
2.5 电源管理电路
由于接口电路板功耗不超过2W,可以从虚拟机主机的USB接口接5V直流电源,通过线性稳压器件ASM1117-3.3降为3.3V电压供给最小系统及外围电路。继电器由学生设计的控制机构提供12V直流电源。
3 软件设计
系统软件包括接口电路板(下位机)的程序设计和虚拟设备软件开发(上位机)2个部分。
3.1 上位机软件
上位机软件采用C sharp(C#)编写。C#是一种完全面向对象的高级语言,是微软公司专门为NET Frame-Work开发的编程语言。它简单易学,摒弃了C++中的指针、宏和多重继承制,使程序运行更加稳定[11]。仿真界面和通信接口基于C#开发,电机和导轨使用PictureBox控件,背景使用Panel控件,控件关联变量实现动画效果。添加的图像是事先用Photo-shop处理的已经清除背景的PNG格式的图片。
X-Y平台仿真界面如图7所示,它包括电机、丝杠、工作台等部件。为表现工作台的运动轨迹,设置了虚拟的刻刀,虚拟刻刀可以在工作台上绘制滑动的轨迹。仿真界面上添加了虚拟限位传感器,限位传感器的位置可以随意拖放,当工作台触碰到限位传感器时,便使传感器的绿色色块变为亮绿色,并向下位机发送信号,由下位机闭合继电器。网络通信接口使用了.NET平台的同步嵌套接字技术,包括同步嵌套字服务器的主机解析、主机绑定、端口监听、数据接收、数据发送。上位机与下位机的通信采用UDP协议。
3.2 下位机软件

图7 上位机仿真界面
传统的嵌入式微处理器或者是8位的处理器,但其性能有限;或者是32位基于ARM的微处理器但在使用上需要嵌入式操作系统的支持。这一情况直到ARM公司推出Cortex-M内核才得以改善,它无需操作系统,可以像单片机一样使用Keil C语言进行编程[12]。意法半导体公司为具有Cortex-M内核的STM32系列单片机提供了程序开发的库,使程序员避开繁琐的寄存器操作,大大缩短了项目的开发时间。虚实结合的X-Y数控实训平台接口电路板的程序,首先实现底层硬件电路的驱动,包括时钟系统初始化、通用IO口输入输出配置、ENC28J60初始化、定时器3捕获引脚配置等。单片机以中断的方式捕获引脚脉冲,因此需要进行中断优先级的设置。
3.2.1 系统时钟配置
单片机是在同一的时钟基准下按照程序编写流程有序工作的。接口电路板采用外部高速时钟的方式获取系统时钟信号。系统在上电后,首先等待外部8 MHz晶振产生的时钟稳定,然后由时钟倍频寄存器将外部8MHz晶振时钟倍频生成72MHz系统时钟信号。系统时钟信号再经过1分频产生高级高性能总线(AHB)的时钟,在AHB上有2条高级外设总线(APB1、APB2),通过调用库函数RCC_PCLK1Config()、RCC_PCLK2Config()分频AHB总线的时钟,得到APB1与APB2的总线时钟,这2个时钟信号分别为挂接在上面的外设提供基准时钟信号。在使用外设之前,需要开启相应的总线时钟。
3.2.2 通用IO口配置
STM32的通用输入输出端口(GPIO)可以单独配置为输入口或者配置为输出口。输入方式有模拟输入,悬浮输入、上拉输入、下拉输入4种。输出有开漏输出与推挽输出,调用相关的库函数进行配置寄存器参数的修改。
3.2.3 网络协议实现
网络接口的数据传输使用了UDP协议,NC28J60网络控制器提供了网络通信的物理层。以太网控制器根据MAC地址接收网线上的数据并放在缓存中,单片机以SPI协议读取缓存中的数据,并根据数据的协议类型,调用相应的处理函数。为了减少单片机闪存的消耗、提高数据的处理速度,系统并没有直接移植现有TCP/IP协议,而是根据协议规定编写了ARP协议、ICMP协议、IP/UDP协议。程序调用Void Ether_Init(void)函数初始化网络接口,在大循环调用unsigned char Ether_Analyze(void)读取网络控制器中的数据,在数据发送时调用unsigned char UDP_Send(unsigned char*ip,unsigned int dstport,char*P,int len)函数。
4 结束语
虚实结合的仿真设备大幅降低了实验室建设和维护的经费,并且打破了地域和时间的限制,提高了实验室使用效率,调动了学生自主学习的积极性和自觉性,拓展了学生课程学习的空间和时间[13]。作为改进,可以为虚实结合的X-Y数控实训平台仿真界面制作三维效果,以更加逼真地显示工作台的运动过程和机械原理。如果将评价系统加入仿真机中,可以对学生的操作步骤和程序的运行结果自动打分,实现自动化的远程教学与实验。
(References)
[1]蔡卫国.虚拟仿真技术在机械工程实验教学中的应用[J].实验技术与管理,2011,28(8):76-78.
[2]黄登红.机电一体化专业虚实结合实训模式应用研究[J].中国科技信息,2013(12):161.
[3]成亚萍,曾向阳.数控X-Y工作台的硬件设计[J].湘潭大学自然科学学报,1998(2):108-110.
[4]熊先锋,杨国志,吕帮俊.虚实结合的PLC实验教学仪器设计[J].中国现代教育装备,2014(5):18-23.
[5]连香姣.X-Y工作台的机电一体化系统设计[J].北京建筑工程学院学报,2002,18(1):75-76.
[6]王文杰,宋扬.X-Y工作台的半闭环控制系统设计[J].机械工程与自动化,2007(6):159-161.
[7]徐亮,阮江军,甘艳,等.去耦电容在PCB板设计中的应用[J].电测与仪表,2002,39(4):5-8.
[8]亿光电子工业股份有限公司.4PIN SOP Phototransistor Photocoupler EL357N-G Series[EB/OL].[2014-08-13].http://www.everlight.com/file/ProductFile/EL357N-G.pdf.
[9]欧姆龙自动化(中国)有限公司.G5NB功率继电器[EB/OL].[2014-08-15].http://www.fa.omron.com.cn/data_pdf/cat/g5nb_ds_c_1_1.pdf?Id=2818.
[10]张伟业,黄云龙,陈国定.基于ENC28J60以太网通信接口的设计与实现[J].机电工程,2008,25(1):28-30.
[11]吴正顺,陈孝威.C sharp绘制三维图形的方法研究[J].贵州大学学报:自然科学版,2009,26(3):53-56.
[12]孙书鹰,陈志佳,寇超.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):59-63.
[13]马远新,姜莉.虚实结合的医学电工电子实验室建设[J].中国现代教育设备,2010(21):125-126.
Design of X-Y CNC training platform combined with virtuality and reality
Ding Mingliang1,Ding Jinhua1,Wang Dequan1,Gao Teng1,Li Mingying1,Zong Jingbin2
(1.Department of Mechanical Engineering and Automation,Dalian Polytechnic University,Dalian 116034,China;2.Wise Welding Technology &Engineering Co.,Ltd.,Beijing 100076,China)
The X-Y CNC training platform consists of interface board and virtual machine running on the computer.The master computer with PC and the slave computer with embedded system connected by Ethernet,based on UDP protocol communication.Tacking STM32F103C8RBT6as the core,the interface board carries out pulse detection,the output of relay,network communications and so on.Based on C#,the virtual machine is combined with animation motor,animation screw,animation stages,and so on.The platform combined with virtuality and reality achieves to the function of real machine as students used in real life.The terminal block of interface board is equivalent effect as the interface of real machine.The virtual machine achieves to simulate the acting of the real machine and produce the signal of limit sensor.The platform with Ethernet can be extended to achieve automatic scoring upload,remote monitoring operations,and other functions.
virtuality mechanical and electrical equipment;training platform;X-Y CNC platform;ENC28J60
TP391
A
1002-4956(2015)3-0152-05
2014-08-23
2012年度辽宁省普通高等教育本科教学改革研究立项项目(No.811:多元构建实践环境培养机电学生就业创业能力)资助
丁明亮(1988—),男,山东日照,硕士研究生,研究方向机械电子工程
E-mail:gnail.2008@163.com
丁金华(1962—),男,山东威海,博士,教授,研究方向为机械电子工程.
E-mail:342012450@qq.com
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10
中国特种设备安全(2022年6期)2022-09-20
哈尔滨轴承(2020年4期)2020-03-17
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
猪业科学(2018年4期)2018-05-19
制造技术与机床(2017年8期)2017-11-27
电子制作(2017年23期)2017-02-02
邢台学院学报(2016年4期)2016-02-28
中国资源综合利用(2016年10期)2016-01-22
