智能角度传感器的应用设计
2015-07-02 00:31汤勤慧鲁晓东鲁林华芦立娟
大学物理实验 2015年5期
汤勤慧,戴 宇,郑 寅,鲁晓东,鲁林华,芦立娟
(浙江海洋学院,浙江舟山 316000)
智能角度传感器的应用设计
汤勤慧,戴 宇,郑 寅,鲁晓东,鲁林华,芦立娟∗
(浙江海洋学院,浙江舟山 316000)
本文设计了一种利用单片机对角度传感器采集到的信息进行分析、处理方法,并通过控制电机和阀门来实现控制蓄液池的水位高低。
单片机;角度传感器;控制;电机;阀门
控制蓄液池的水位在工业、农业、生产、生活控制过程中有着极其重要的作用。例如居民生活用水的供应,饮料、食品加工,溶液过滤,化工生产等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度,既不能太满溢出造成浪费,也不能过少而无法满足需求。因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的设备对液位进行检测、控制,能收到很好的效果。基于以上情况,本文设计一种利用角度传感器来自动控制液面高度的装置[1-3]。
1 仪器及流程
1.1 仪器
角度传感器SCA60C、模数转换器、单片机、键盘、数字显示器、电机、电脑。
1.2 流程
如图1所示是一个单回路反馈控制系统,控制的任务是使水箱的液位角度等于给定值,减小或消除来自系统内部或外部扰动的影响。用液位角度参数为被控对象。交流电动机带动齿轮泵通过阀向上水箱供水,调节阀使之同时向外排水,令入水的速度大于出水的速度,达到液位角度的动态调整。所以今天我们想设计一种能感应水位的装置,用水的多少让浮球产生沉浮情况改变角度的大小。利用角度传感器最后控制进出水情况。
2 结构设计
本系统以STC89C51单片机为控制芯片,采用L293D驱动直流电机。根据角度传感器的反馈信号,经A/D转换之后输入给单片机,通过PWM方式,调节脉冲大小,从而打开或关闭阀门的进口或者出口,之后改变页面高度,于是改变浮球的沉浮角度。该转角可以通过数码显示器显示。浮球角度控制系统如图2所示:
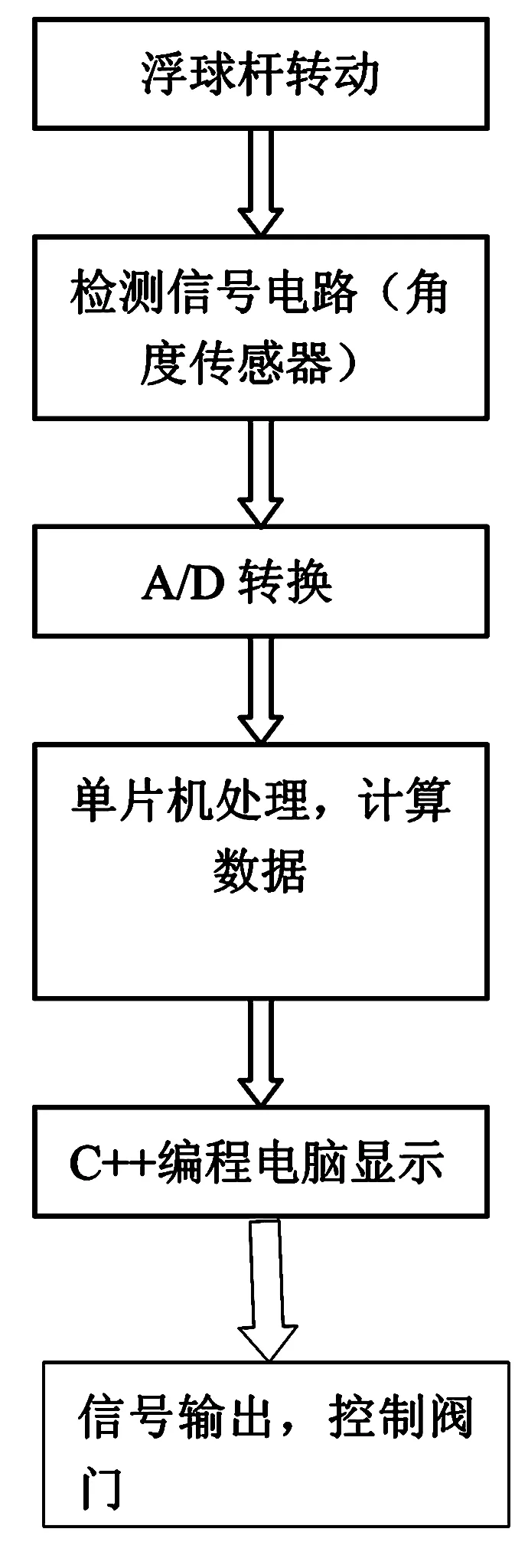
图1 流程图
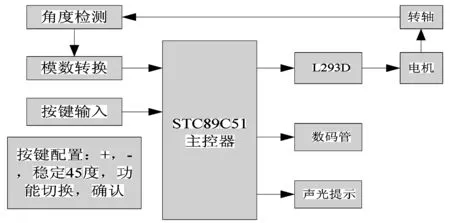
图2 结构图
2.1 进出水控制算法
使用闭环控制,把转轴的实际所在位置经角度传感器检测后反馈给单片机处理,经过与设定值比较之后再输出修正量,如此循环。如图4所示:
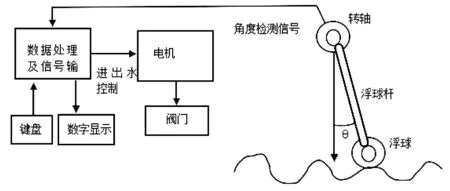
图3 传感器实验原理图
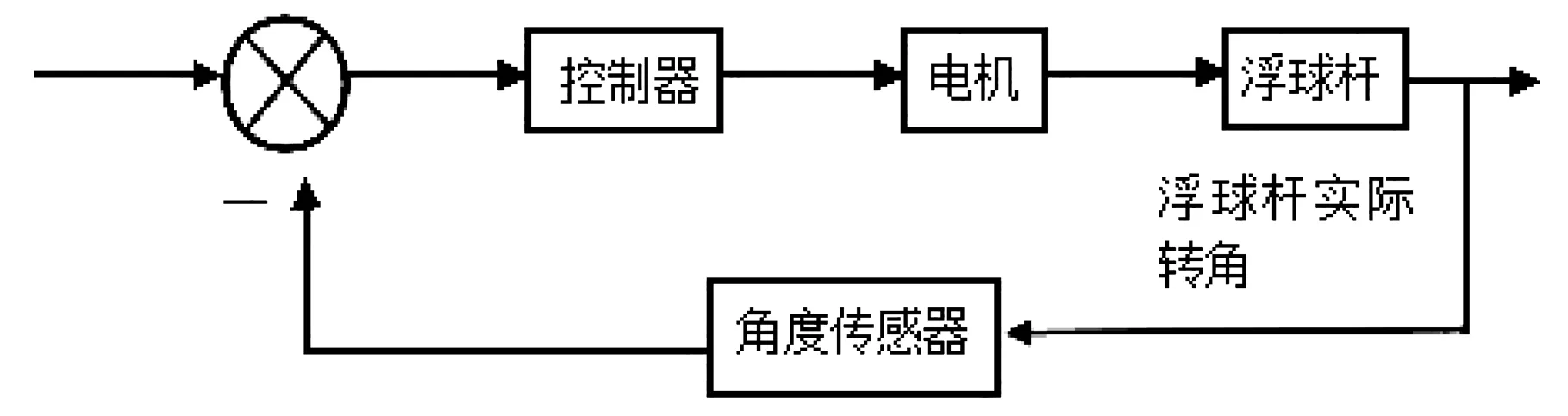
图4 进出水算法流程图
2.2
电路中有四个输入接口,分别为高水位、低水位、蓄水、出水输入接口,向单片机传输信号,本电路中规定输入信号为低电平即为0时表示有水,输入信号为高电平即为1时表示无水。
3 实验原理
如图3所示,水的液面的高低带动浮球的沉浮,从而杆带动转轴产生一定的角度,经过角度传感器检测到信号传给调节装置,角度传感器的反馈信号,经A/D转换之后输入给单片机,通过PWM方式,调节脉冲大小,从而启动电机,控制阀门的进口或者出口。而屏幕上实时显示角度的大小[4-5]。
3.1 采用SCA60C检测浮球杆的倾斜角度
SCA60C是一款低成本单轴倾角(加速度)传感器,可以测量垂直Z轴方向的加速度值,测量范围±1 g。
角度传感器SCA60C
特点:1、单轴倾角传感器;2、测量范围1 g(± 90度);3、单级5 V供电,比例电压输出;4、模拟0.5~4.5 V输出;5、工作温度范围。
应用:1、双轴平台调平,倾斜测量;2、加速度或者位置测量;优势:抗冲击能力强,能耗低。
3.2 输出电压与角度转换
可以根据下面的公式将传感器输出电压转换成倾斜角度:
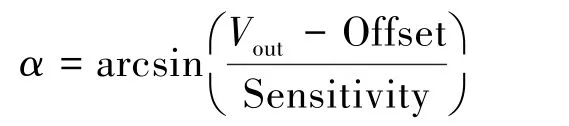
其中,Offset是浮球杆加速度为0 g位置时的电压输出(通常为2.5 V),Sensitivity是设备的灵敏度(通常为2 V/g)。为了取得更好的精确度,应用中可以将实际输出值代替通常值。
4 电路图
4.1 整个装置的电路图如图5所示:
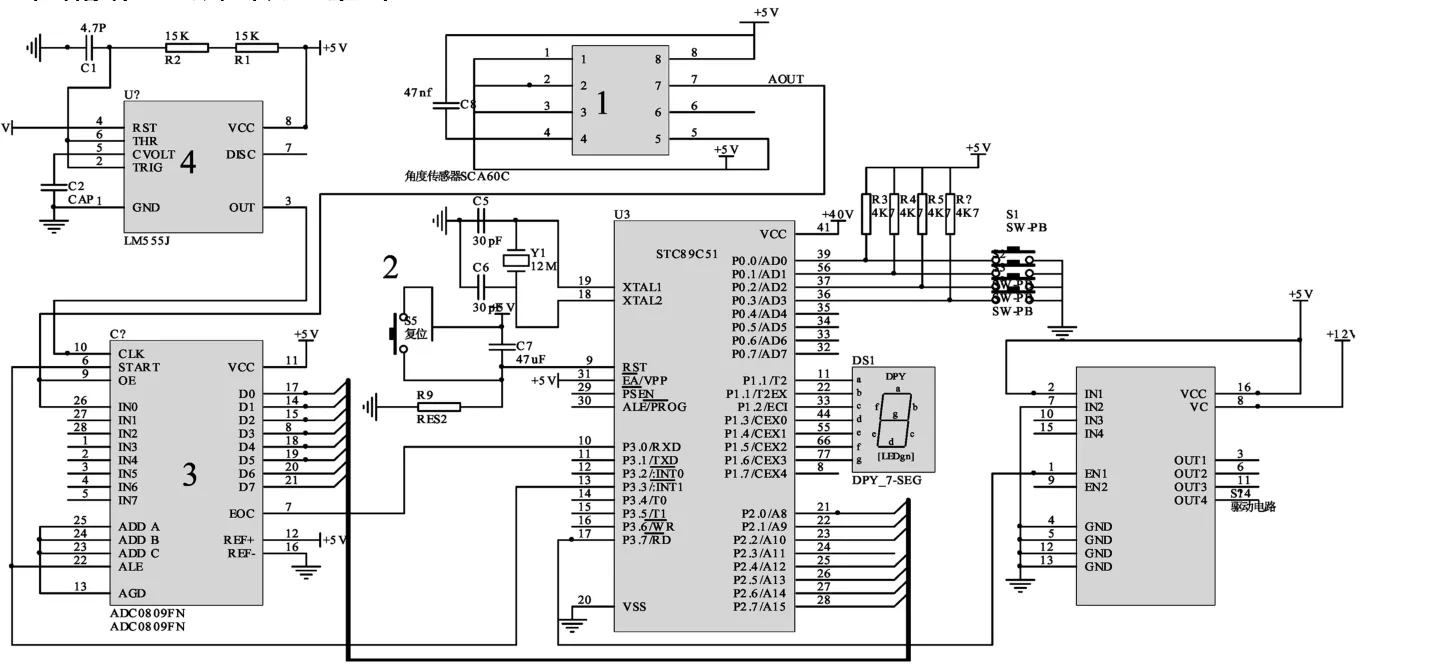
图5 总电路图
4.2 角度传感器
图5中1模块是角度传感器SCA60C检测电路,引脚4接地,引脚8接5 V,引脚4和8之间用电容隔离,电容值不小于47nF,这里取47nF,7引脚是电压输出端,传感器SCA60C在水平位置时, V0端输出2.5 V,在-90°时电压输出0.5 V,在+ 90°时电压输出4.5 V。如图6所示:
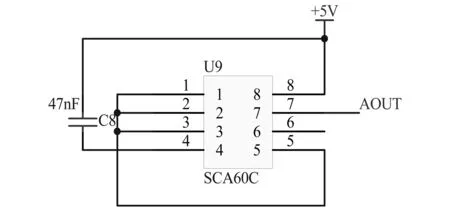
图6 角度传感器
4.3 电源
图5中2模块是采用稳压电源供电,输出电压12 V。经过降压稳压器7805输出5 V电压,如图所示,其中5 V电压供给控制电路,12 V供给L293D驱动直流电机,如图7所示。
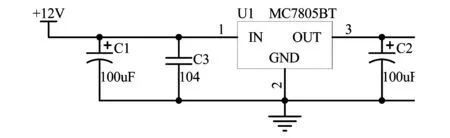
图7 电源电路图
信号调理与转换电路,对信号进行放大、运算调制等,此外信号调理转换电路以及传感器的工作必须有辅助电路,如图8所示:
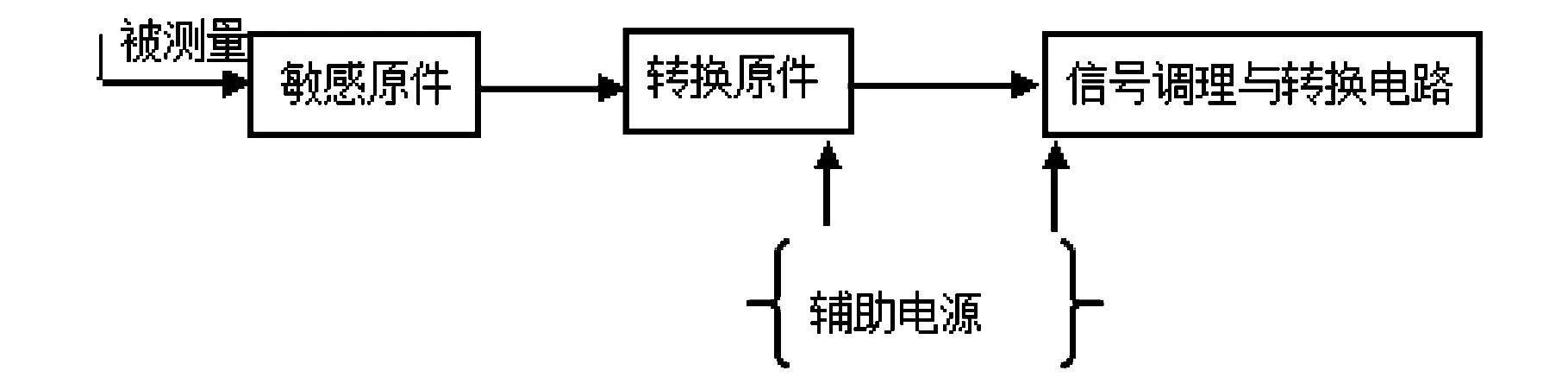
图8 辅助电源
4.4 模数转换电路
图5中3、4部分,ADC0809是可以将我们要测量的模拟电压信号量转换为数字量从而可以进行存储或显示的一种转换IC。下面是它的管脚图和逻辑图9。
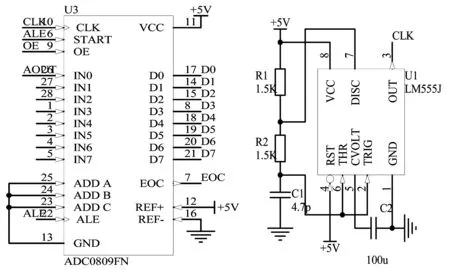
图9 转换电路图
IN0-IN7:模拟量输入通道。就是说它可以分时地分别对八个模拟量进行测量转换。
ADDA-C:地址线。也就是通过这三根地址线的不同编码来选择对哪个模拟量进行测量转换。
ALE:地址锁存允许信号。在低电平时向ADDA-C写地址,当ALE跳至高电平后ADDA-C上的数据被锁存。
START:启动转换信号。当它为上升沿后,将内部寄存器清0。当它为下降沿后,开始 A/D转换。
D0-D7:数据输出口。转换后的数字数据量就是从这输出给S52的。
OE:输出允许信号,是对D0-D7的输出控制端,OE=0,输出端呈高阻态,OE=1,输出转换得到的数据。
CLOCK:时种信号。ADC0809内部没有时钟电路,需由外部提供时钟脉冲信号。一般为500KHz EOC:转换结束状态信号。EOC=0,正在进行转换。EOC=1,转换结束,可以进行下一步输出操作REF(+)、REF(-):参考电压。参考电压用来与输入的模拟量进行比较,作为测量的基准。一般REF(=)=5v REF(-)=0 V。
5 设计要求
(1)用手转动浮球杆时,能够显示杆的转角θ。显示范围为0~60°,分辨率为2°,绝对误差小于等5°。
(2)当改变液面的高度,使浮球杆能够在0~ 60°范围内变化并要求实时显示θ。
(3)通过键盘设定浮球杆的转角,其范围为0 ~60°。要求θ在5秒内打到设定值,并时刻显示θ。最大误差的绝对值不能超过5°
6 结 论
利用现代科学应用技术(传感器、计算机)进行迁移的设计思想,较强的实验动手能力,进行仪器设计和改装的能力。这样,既利用新技术解决了老问题,又开阔了学生的视野。培养了学生创新意识和创新能力,可作为设计性实验之一,并可作为新的迁移的基础。
[1] 李学挥.大学物理实验[M].北京:高等教育出版社.
[2] 胡汉才.单片机原理及系统设计[M].北京:清华大学出版社.
[3] 楼然苗,李光飞.51系列单片机设计实例[M].北京:北京航空航天大学出版社.
[4] 李成龙.基于单片机增量术编码器的分光设计[J].大学物理实验,2015(104):54-56.
[5] 张羽,胡孟军,冉奉民,等.热学实验恒温箱的智能控制设计[J].大学物理实验,2014(6):78-80.
The App lication of Intelligent Angle Sensor Design
TANG Qin-hui,DAIYu,ZHENG Yin,LU Xiao-dong,LU Lin-hua,LU Li-juan
(Zhejiang Ocean University;Zhejiang Zhoushan 316000)
We design amicrocontroller to the angle sensor collected information analysis and processing,and by controlling themotor and valves to control the reservoir water level.
single chip microcomputer;the sensor of angle;control;motor;the vale
O 4-33
A
10.14139/j.cnki.cn22-1228.2015.005.022
1007-2934(2015)05-0076-04
2015-05-21
∗通讯联系人
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
数学大王·趣味逻辑(2022年3期)2022-03-17
中学生数理化·中考版(2021年4期)2021-07-22
太原科技大学学报(2019年3期)2019-08-05
汽车维修与保养(2019年2期)2019-06-19
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
中国防伪报道(2017年4期)2017-06-15
浙江大学学报(工学版)(2015年11期)2015-07-11
汽车维护与修理(2015年2期)2015-02-28