
眼底自适应成像系统中的二自由度头托设计
2015-07-05 17:34潘宇骏韩玉琢解洪升杨乐宝王少鑫李大禹宣丽
液晶与显示 2015年4期
潘宇骏,韩玉琢,解洪升,杨乐宝,王少鑫,李大禹,宣丽*
眼底自适应成像系统中的二自由度头托设计
潘宇骏1,3,韩玉琢2,解洪升1,3,杨乐宝1,3,王少鑫1,李大禹1,宣丽1*
(1.中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室,吉林长春130033; 2.长春中医药大学附属医院,吉林长春130021; 3.中国科学院大学,北京100049)
眼科临床上所使用的简易头托限定医生与受试者的距离不能超过一臂之长,因此无法用于较为庞大的眼底自适应成像系统。为了达到眼底自适应成像系统与受试者瞳孔快速对准、稳定定位的要求,设计了一种可长距离控制的二自由度的头托。采用具有自锁能力的梯形丝杠驱动头托垂直运动,采用传动效率高的滚珠丝杠驱动头托水平运动,以步进电机提供动力。基于PIC16F877单片机,完成了头托移动控制的软硬件设计,并在MPLAB与Proteus环境下进行了联合仿真实验。仿真结果表明,所设计的头托可在竖直方向和水平方向以20 μm的精准度定位,能够实现长距离、快速准确的瞳孔对准和左右瞳孔切换过程,是眼底自适应成像系统的良好辅助工具。
眼底自适应成像;头托;丝杠;PIC16单片机;步进电机驱动
1 引言
人眼视网膜是反应身体健康状况的晴雨表。许多全身性疾病,包括医生较关注的糖尿病、高血压、肾病[1]等,都会引起血液成分改变。这些改变会首先造成微细血管梗阻、无灌注、血管壁变薄变脆,产生微血管瘤、出血、脂质渗出、棉絮斑、新生血管形成[2]等现象。眼底视网膜具有终末血管系统,最微细的血管约6 μm[3],对血液成分的变化非常敏感,在疾病早期就会产生变化。早发现、早治疗,能够大幅度地提高此类疾病的治愈几率。因此高分辨率的视网膜微细血管形态检查可以为重大疾病的病理学、早期诊断研究提供一个良好的平台[4-6]。
本实验室从2005年开始进行眼底视网膜自适应光学成像方面的研究,目前实验室已获得了5~7 μm直径的眼底血管成像。现正在努力实现微细血管层的自动化寻焦成像[7]。
在眼底自适应成像系统中,成像分辨率要细致到3 μm[8],成像视场也从直径10 mm缩小到200 μm,成像放大倍率较高,需将受试者的瞳孔与眼底自适应成像系统的入瞳严格对准,然后搜索视网膜微细血管层的过程还需要受试者保持长时间(约1 min)的盯视视标的状态。这就需要头托具有精细的调整能力和对头部的稳定固定能力,能够快速准确地完成瞳孔对准过程,并稳定舒适地支撑受试者的下颚。
眼科临床上所使用的简易头托是一种可以简单调整高度的支架。使用时,受试者将头部倚靠在托架上,医生一边观测镜头一边转动螺母使托架上下移动、转动手轮使托架水平移动,从而使受试者的瞳孔位置与成像镜头对准。由于临床检查设备的光路很简单,医生与受试者的头托小于一臂距离,所以这种简单的头托能够满足边调整边成像的要求。
但这种简易头托用于眼底自适应成像系统时则存在如下问题:
(1)限定医生与受试者的距离不能超过一臂之长,无法用于较为庞大的眼底自适应成像系统。
(2)平均对准时间大于30 s,不利于保持受试者人眼的盯视状态稳定。
因此本课题设计的二自由度头托,需舒适稳定地支撑受试者的下颚,医生通过程序遥控头托在竖直方向和水平方向精准定位,实现长距离、快速准确的瞳孔对准和左右瞳孔切换过程,以满足眼底自适应成像系统的要求。
2 头托的定位精度分析
决定头托移动性能的主要参数有负载、移动步长、行程、灵敏度和速度,这些参数的确定需要结合眼底自适应成像系统的使用操作过程和精度要求来考虑。
成年男性的头部重量为4~6 kg[9],考虑到人为紧张所施加的压力不大于5 kg,保留一些余量,设计外负载12 kg,机构自重12 kg,静态总负荷24 kg。
由于个体差异,不同人眼的瞳距不同,人眼至下颚的高度也不同。在确定头托的行程参数时需考虑普适性,满足不同受试者的使用要求。
人眼瞳距一般为48~78 mm。在图1中,红色圆圈为系统入瞳。当机构移动至行程最右端时,瞳距最大的受试者也可以将左眼对准系统入瞳;当机构移动至行程最左端时,瞳距最大的受试者也可以将右眼对准系统入瞳。因此水平行程必须大于瞳距的最大值78 mm,根据冗余设计思想,将机构的水平行程设计为85 mm。垂直行程沿用简易头托中的参数100 mm。
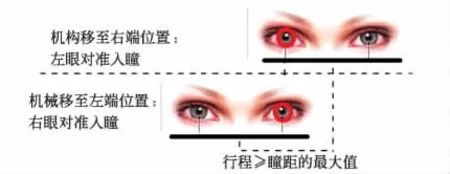
图1 水平行程由瞳距决定Fig.1Horizontal stroke length determined by the pupil distance
在视网膜自适应成像系统中用监视瞳孔位置的相机来判断人眼瞳孔是否与光路对准。在测试人眼之前先使用模型眼代替人眼,令模型眼、哈特曼探测器以及瞳孔相机处于共轭位置;在水平和垂直方向上调整瞳孔相机位置,使直径为6 mm的模型眼瞳孔在瞳孔相机中完整成像,如图2所示;在软件上用红色圆圈对模型眼瞳孔的像进行标示,此红色圆圈即为将来被测者瞳孔的位置。
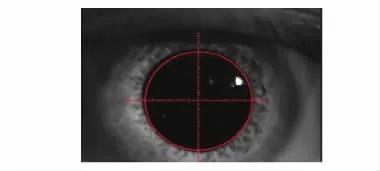
图2 瞳孔采样区域Fig.2Pupil sampling zone
观测真实人眼时,使人眼瞳孔与自适应成像光路对准的方法如下:移动头托使人眼瞳孔在瞳孔相机中完整成像,进一步调整至瞳孔与红圈接近重合,即瞳孔在红圈圆心上方与下方的刻度数值相同、在圆心左侧与右侧的刻度数值也相同,此时就可以认为受试者瞳孔对准了哈特曼探测器。
依据实验经验,为使哈特曼探测器与人眼瞳孔有足够的对准精度,需使瞳孔相对哈特曼探测器光轴的移动步长小于等于瞳孔直径的1/60,即6 mm/60=100 μm。
由直径6 mm的红圈在显示屏上的直径约为9 cm,可知放大倍率为15;则瞳孔移动100 μm,显示屏上的移动距离为1.5 mm,是很容易能够被视觉分辨的长度。因此在红圈上做出十字型坐标刻度,最小刻度选择为1.5 mm,即可分辨瞳孔实际移动距离100 μm。
考虑到使用方便,设置3个平移速度调节档位,分别为精调、微调和快速调节,设置其对应的速度分别为100 μm/s、1 mm/s、10 mm/s。
综上所述,头托的技术指标如表1所示。
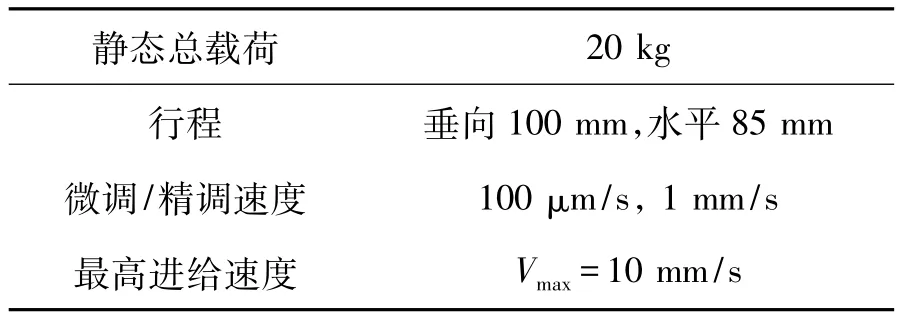
表1 头托技术指标Tab.1Functional parameters
3 头托的机械结构设计
螺旋传动机构具有传动比大、定位精度高、运行平稳的特点。螺旋传动机构中,梯形丝杠的传动机构易于实现反行程自锁,可用于垂直方向的传动,以避免托架因自重而逆行;滚珠螺旋副的传动机构具有运动的可逆性,摩擦阻力小,传动效率高,适用于水平方向的传动[10]。故本设计采用梯形丝杠驱动头托垂直运动、采用滚珠丝杠驱动头托水平运动,以两个步进电机提供动力。头托结构由导向轴、顶架、托架、底架、梯形丝杠、滚珠丝杠及步进电机组成。其中,托架为支撑受试者下颚的部件,与导向轴、工作台架、梯形丝杠及螺母组成了竖直组件,可以做沿垂直方向的直线运动;工作台、线性导轨、底架、滚珠丝杠及螺母组成了水平组件,可搭载着工作台架做水平方向的直线运动。头托的机械结构如图3所示。
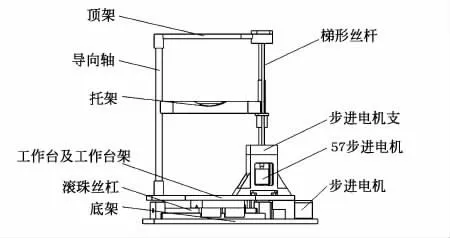
图3 头托机械结构Fig.3Framework of the head prop
4 头托的自动控制设计
4.1控制系统硬件设计
本设计采用PIC16F877单片机[11]作为控制核心,以ULN2003A集成电路作为驱动芯片,由键盘输入指令,分别控制两个步进电机的启停、转动方向与转动速度,进而控制头托的启停、运动方向与运行速度。其原理图如图4所示。

图4 控制系统原理图Fig.4System overall design diagram
设定PIC16单片机的B端口为按键输入端口:按钮S1-S8分别于与RB0-RB7引脚相连。键盘接口电路如图5所示。各按钮功能如表2所示。
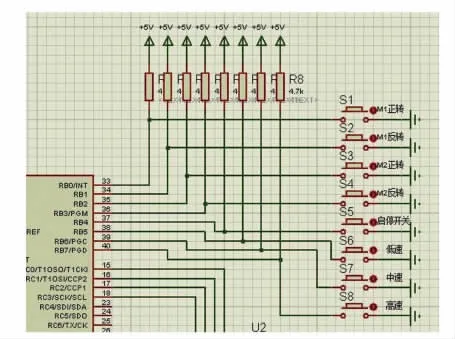
图5 键盘接口电路Fig.5Keyboard interface circuit
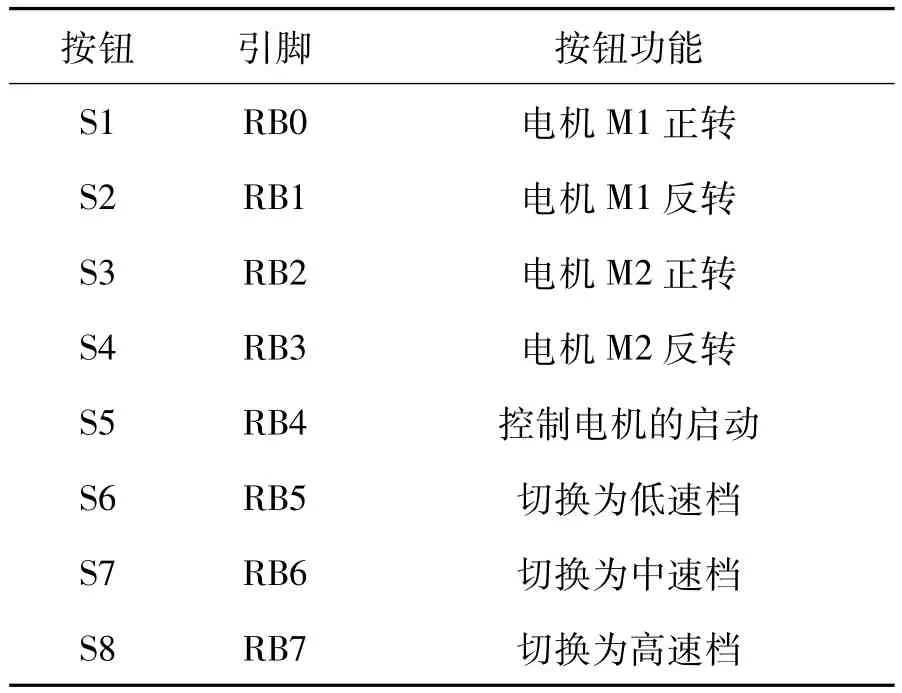
表2 按钮功能表Tab.2Button Menu
本设计中用到2个两相步进电机,需要单片机产生两路的+A和-A、+B和-B两相控制信号。将单片机的C端口的低四位作为电机M1的脉冲信号输出口,D端口的低四位作为电机M2的脉冲信号输出口。驱动接口电路如图6所示。
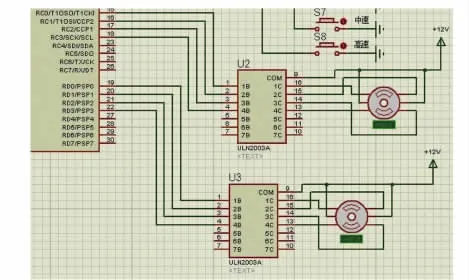
图6 驱动接口电路Fig.6Driver interface circuit
4.2控制系统软件设计
控制系统的主程序流程如图7所示。
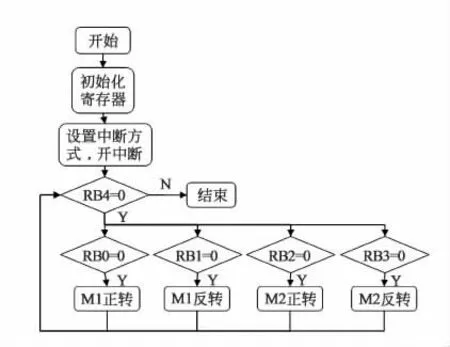
图7 主程序流程图Fig.7Flow chart of the system software
要使电机转动,只需要向单片机的端口C/D按一定的顺序发送控制字。电机正转的控制字时序为0xFC,0xF6,0xF3,0xF9,反转的控制字时序为0xFC,0xF9,0xF3,0xF3。
电机组件的步长由头托架的移动精度决定,其关系为:

式中:s是头托架的位移步长,P是丝杠的导程,α是步进电机的步距角。本设计中所选用的步进电机均为两相步进电机,采用双拍工作方式,步距角α为1.8°。选用的丝杠的导程P为2 mm。将以上数据代入式(3)中计算,可知托架运动的步长s=10 μm,即电机接收一个脉冲,头托架移动10 μm。
对步进电机的转速控制是用软件延时的方式实现的。具体实现方法是,在主程序中,每向端口C/D发送一个控制字后,都会调用一次延时子程序DELAY(num),延时以毫秒为单位。只要修改变量num的值,就可以改变输出脉冲的频率,进而改变步进电机的转速。例如,对一档速度100 μm/s,只需要设定变量num的值为100 ms。这样,单片机每发送一个控制字后会延时100 μs,每秒发送10个脉冲,此时步进电机的转速就是100 μm/s。修改延时时间num是通过B端口高四位的中断实现的:当RB5、RB6、RB7产生电平变化时,主程序中断——执行中断子程序,改变变量num的值——退出中断返回主程序。步进电机的转速控制流程如图8所示。
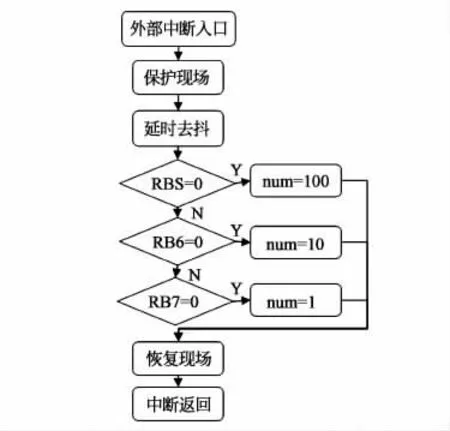
图8 步进电机的转速控制图Fig.8Flow chart of speed control
转向控制实现方法:每个电机的转向都由两个开关控制。例如,当S1按下时,RB0为低电平,此时发送正转控制字,电机M1正转,当S1未按下且S2按下时,此时发送反转控制字,电机M1反转。值得注意的是,S1的优先级应高于S2,即正转的优先级高于反转,当S1、S2同时按下时,电机正转。在编程时,可将S1、S2的程序用if-else if语句来编写,由于if语句的优先级高于else if语句的优先级,这样S1语句的优先级就高于S2语句。
为了步进电机在换向时可以平稳地过度而不错步,在输送每一个控制字之前都加上一个if语句判断当时的脉冲控制字。这样,在改变转动方向时,步进电机会直接从前一步的位置开始反转,而不会错步。
4.3仿真实验结果
利用仿真软件Proteus及MPLAB对程序文件进行联合仿真实验。当开关S5按下后,再按S1-S4开关,相应的电机会开始相应方向地转动;分别按下开关S6、S7、S8后,电机的转速会分别改变至低速档、中速档与高速档。
仿真结果显示,控制系统可以按预期的设计要求进行工作。
5 结论
设计了一种二自由度头托,通过步进电机控制驱动,自动化调节,不受距离限制,解决了眼科临床上的简易头托限定医生与患者距离不能超过一臂之长的问题,并可将瞳孔定位精度提高至20 μm,满足眼底自适应成像系统的高精度要求;同时能够快速、准确地完成瞳孔对准过程。长距离的左右瞳孔切换快速准确,是眼底自适应成像系统的良好辅助工具。
[1]姚毅,赵军平.糖尿病眼底病防治指南[J].中国实用眼科杂志,2001,19(2):83-95.Yao Y,Zhao J P.Diabetes prevention guide ocular fundus[J].Chinese Journal of Practical Ophthalmology,2001,19(2): 83-95.(in Chinese)
[2]李凤鸣,刘家琦.实用眼科学[M].北京:人民卫生出版社,1999.Li F M,Liu J Q.Practical Ophthalmology[M].Beijing:People's Medical Publishing House,1999.(in Chinese)
[3]Liang J,Williams D R,Miller D T.Supernormal vision and high-resolution retinal imaging through adaptive optics[J].JOSA A,1997,14(11):2884-92.
[4]张承芬.糖尿病性视网膜病变临床与发病机制研究进展[J].中国实用眼科杂志,1998,16(4):198-201.Zhang C F.Study of diabetic retinopathy and pathogenesis clinical progression[J]Chinese Journal of Practical Ophthalmology,1998,16(4):198-201.(in Chinese)
[5]刘艳,罗志忠.糖尿病性视网膜病变与糖尿病控制状态研究[J].中国糖尿病杂志,2002,10(1):37-9.Liu Y,Luo Z Z.Diabetic retinopathy and diabetic control state study[J].Chinese Journal of Diabetes,2002,10(1):37-9.(in Chinese)
[6]NASA.Technology Aids Early Detection of Diseases[EB/OL].http://www.nasa.gov/centers/glenn/business/biomed_eyes.html.2011-04-30.
[7]郑贤良,刘瑞雪,夏明亮,等.液晶自适应光学视网膜校正成像技术研究[J].中国光学,2014,7(1):98-104.Zheng X L,Liu R X,Xia M L,et al.Correction liquid crystal adaptive optics retinal imaging technology research[J].Chinese Optics,2014,7(1):98-104.(in Chinese)
[8]程少园,宣丽,胡立发,等.人眼视网膜成像自适应光学系统设计[J].光子学报,2009,38(5):1131-5.Cheng S Y,Xuan L,Hu L F,et al.Human retinal imaging adaptive optics system design[J].Photon Sinica,2009,38 (5):1131-5.(in Chinese)
[9]Huarmey.What is the weight of an adult human head[EB/OL].http://www.answers.com/Q/What_is_the_weight_of_an_ adult_human_head,2011.
[10]剑雄,晨霞,承怡.机械结构设计禁忌[M].北京:机械工业出版社,2008.Jian X,Chen X,Cheng Y.Mechanical Design Taboo[M].Beijing:Machinery Industry Press,2008.(in Chinese)
[11]江和.PIC16系列单片机C程序设计与proteus仿真[M].北京:北京航空航天大学出版社,2010.JiangH.PIC16 Series Microcontroller C Programming and Proteus Simulation[M]Beijing:Beihang University Press,2010.(in Chinese)
Design of two degree-of-freedom head prop in adaptive optics retinal imaging system
PAN Yu-jun1,3,HAN Yu-zhuo2,XIE Hong-sheng1,3,YANG Le-bao1,3,WANG Shao-xin1,LI Da-yu1,XUAN Li1*.
(1.State Key Laboratory of Applied Optics,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China; 2.The Affiliated Hospital of Changchun University of Traditional Chinese Medicine,Changchun 130021,China; 3.Graduate University of Chinese Academy of Sciences,Beijing 100049,China)
Simple head props used in clinical ophthalmology limit the distance between the doctor and the patient to arm’s length,so that it cannot be utilized in adaptive optics retinal imaging system which is big and heavy.A two degree-of-freedom head prop is designed to support the subject’s jaw and to make the subject’s pupil align more quickly and comfortably in adaptive optics retinal imaging system.Self-locking trapezoidal screw in vertical movement and high transmission efficiency ball screw in horizontal movement were used with two stepper motors providing power.The electronics design of the control system based on PIC16F877A was completed.A MPLAB-Proteus co-simulation experiment was conducted and the result shows that the system cando the control in realtime to make the motor start,stop,turn and speed.The designed head prop can move in the vertical direction and the horizontal direction at a minimum of 100 μm/s and improve the positioning accuracy to 20 μm,meeting the requirements of the adaptive optics retinal imaging system.
adaptive optics retinal imaging;head prop;screw;microcontroller;stepper motor driver
TH122;TM301.2
A
10.3788/YJYXS20153004.0590
潘宇骏(1990-),男,浙江杭州人,硕士研究生,主要从事机械方面的工作。E-mail:panyj90@163.com
1007-2780(2015)04-0590-06
猜你喜欢
快乐语文(2019年9期)2019-06-22
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
汽车实用技术(2018年18期)2018-09-26
当代陕西(2018年12期)2018-08-04
价值工程(2017年31期)2018-01-17
中国惯性技术学报(2017年1期)2017-06-09
优雅(2016年12期)2017-02-28
电影故事(2016年5期)2016-06-15
专用汽车(2016年8期)2016-03-01
汽车实用技术(2015年8期)2015-12-26
