
调频广播定位技术的研究
2015-07-07 00:53秦红磊
导航定位学报 2015年4期
苏 敏,秦红磊
(北京航空航天大学电子信息工程学院,北京 100191)
调频广播定位技术的研究
苏 敏,秦红磊
(北京航空航天大学电子信息工程学院,北京 100191)
针对全球卫星导航系统在复杂环境下会出现无法定位的问题,本文提出了一种基于公共调频广播信号的定位方法。该方法利用调频广播的多种信号特征,结合指纹定位技术进行定位。调频广播覆盖范围广、信号稳定、抗干扰能力强等优点,可使其应用于室内外定位。在室外复杂环境,研究区域级别定位;在室内环境,除了区域级别定位,还研究精确定位。文中除了阐述方法的原理,还应用了几种不同的定位算法并比较其结果。结果表明,室外的区域判别准确率可达90.81%,室内的区域判别准确率可达100%,室内精确定位的精度可达11.16 m。
调频广播;指纹定位;室外定位;室内定位
0 引言
随着科学技术的飞速进步,现代社会经济、军事对导航定位系统性能要求日益增高,无线电导航是一种重要的导航手段,而其中应用最广泛的是全球卫星导航定位系统。但是,在复杂环境下,如楼宇密集的室外和室内环境,卫星导航会因为丢失卫星信息而出现无法准确定位的情形,这时就需要其他导航手段进行补充。在这种情形下,出现了基于蓝牙、射频识别(radio frequency identification,RFID)、红外线、无线保真(wireless fidelity,WiFi)等定位技术。但是,因为这些信号覆盖范围小,所以在定位区域上有很大限制,大部分只用于室内环境。而且对于不具备这些设备的环境,需要增加相应的发射源。调频(frequency modulation,FM)广播有着悠久的历史,其发射基站多、覆盖范围广、信号稳定、受干扰小、接收成本低等优点使得其成为一种很有潜力的导航源。
目前,国内外基于FM广播的导航定位研究并不多,主要处于理论研究阶段。2003年[1]微软公司成立的首个研究利用FM广播定位的团队,采用智能手表采集公共FM广播信号强度并将其排序后用于定位,区域定位准确率可达80%。文献[2]展示了两年后,他们改进了系统的算法后,在美国西雅图地区其定位精度可以达到8 km。2009 年,文献[3]展示了“FINDR”定位系统,该系统使用短射程FM信号传送器发射信号并利用接收信号强度、定向天线间夹角和信号传播时间来确定用户的位置。文献[4-7]第一次将公共FM广播信号用于室内定位:用智能手机收集信号强度特征,并用指纹定位法取得了很好的定位结果。文献[8]介绍了用信号传播模型进行自动数据库的创建,省去大量时间和人力资源。
总而言之,目前大部分研究主要是基于FM广播信号强度特征来进行定位,方法主要有两种:一种是建立信号传播模型,另一种是指纹定位法。与之前的研究不同的是,除了信号强度特征外,本文还采用了FM广播信号的其他特征参数,将几种特征参数融合后进行定位。定位方法主要采用指纹定位法,因为在复杂环境下,FM广播信号的传播模型受多种因素影响,难以建立。而指纹定位法目前已被广泛应用于各种室内定位,可行性良好。
1 基于指纹的FM广播信号定位方法
指纹定位法分两个阶段:第一阶段是数据特征地图的采集阶段,也称训练阶段,第二阶段是在线定位阶段。在本研究中,第一个阶段主要是采集公共FM广播信号的信号特征,第二个阶段是利用不同的定位算法进行位置的解算[9]。如图1所示。

图1 基于指纹的FM广播信号定位方法框图
1.1 FM广播信号特征数据库的采集
在FM广播特征数据库的采集阶段,需要考虑两个问题:第一个是采集设备的选择,第二个是采集地点的选择。因为采集设备采集数据的可靠性、采集地点的适配性都会关系到未来定位准确率和精度。
由于FM广播的覆盖范围非常广,包含室内和室外的大部分区域。所以在本研究中将其应用于室外和室内的定位。对于室外区域,主要进行区域级别定位;对于室内区域,主要进行区域级别定位和精确定位。
因为指纹定位法主要利用环境信道特征的不同来定位,所以在采集区域的选择上,主要选择环境特征较明显的区域。图2与图3是室外和室内的采集区域。其中图2是北京航空航天大学校园,将其划分成10个区域;图3是北京航空航天大学教学楼内的某一层,因为无法进入每个房间进行数据采集,主要在走廊进行采集,采集分成7个区域。

图2 室外实验区域

图3 室内实验区域
FM广播自20世纪30年代诞生以来,已经经历了近一个世纪的发展,就目前来说,FM广播主要的用途是用来传输音频信号,所以市面上关于接收FM广播的产品主要是收音机,或者是直接的收音芯片。而在本文的研究中,需要得到可以利用其定位的信号特征参数,如接收信号强度(received signal strength indicator,RSSI)等。经过几个方案的尝试,最终构建了如图4的采集系统。
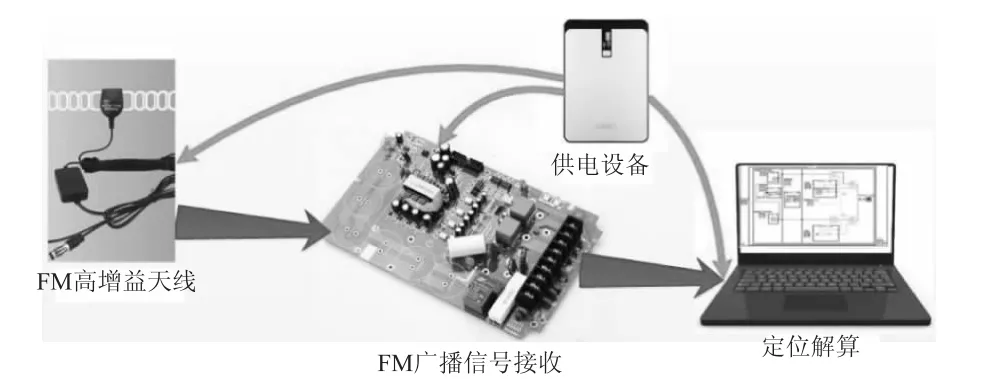
图4 数据库采集系统
该采集系统有着很多优点,它不仅可以实时的保存采集到的数据,而且因为其体积小而具有很好的便携性。除此之外,它不仅可以采集FM广播的RSSI特征而且还给出几个其他可用于定位的特征参数,包括信噪比(signal-noise ratio,SNR),多径指示(Multipath),频率偏移。这些特征参数为以后提升定位准确率与精度提供了有利的条件。
1.2 在线定位阶段
在这一阶段,要结合在第一阶段采集的特征数据库完成位置的解算,最重要的是定位算法的选择。本研究中主要采用了K-近邻定位算法(K-nearest neighbor,KNN),K-近邻加权定位算法(K-weighted nearest neighbor,KWNN),高斯过程回归算法(Gaussian process regression, GPR),人工神经网络算法。下面分别简单介绍一下各种算法。
1.2.1 KNN与KWNN
KNN算法原理简单且容易实现,其基本思想是:在给定一个未知的位置后,根据与该位置FM信号特征的相似程度在特征数据库中选取k个参考点,然后根据这k个参考点的位置进行测试点位置的判定。相似程度主要用欧氏距离评估:

式(1)中,p代表每个参考点的特征向量的维数,即选取的调频广播电台数目。XRPi是某个参考点特征参数向量的第i个分量,XTi是测试点特征参数向量的第i个分量。
KWNN与KNN的不同,主要体现在不同距离的近邻对预测估计贡献的大小上。
式(2)是直接将k个近邻参考点的位置(xi,yi)的平均作为测试点的位置。式(3)是将每个近邻参考点的位置用式(1)中的欧氏距离进行加权后得出测试点的位置[10]。
1.2.2 GPR定位算法
GPR是基于贝叶斯理论和统计学习理论发展起来的一种全新机器学习方法,适于处理高维数、小样本和非线性等复杂回归问题。该方法具有容易实现、超参数自适应获取以及输出具有概率意义等优点[11]。在GPR中,为了保证建模的准确性,只将RSSI特征参数应用其中。
在本文中,考虑满足模型:y=f(x)+ε。其中,观测量y是位置坐标,输入量x是FM广播信号的RSSI,ε是噪声,假设其满足ε~N(0),则可以得到观测量y满足分布:

式(4)中,K是协方差函数的矩阵,协方差函数反应不同点函数值的相关性。在本文中,选取最常用的协方差函数即平方指数协方差:


2 实验及结果分析
2.1 实验设置
室外的主要实验区域是北京航空航天大学校园内部,如图2所示,被划分的10个区域都有着不同的环境特征,对每个区域都用图4中所述的采集设备采集了一定数量的参考点,共计550个,每个参考点的数据包括12个电台的RSSI、SNR和Multipath等特征参数,还有它们所属的区域号;室内的主要实验区域是北京航空航天大学新主楼,目前共采集了400余个参考点的数据。图3是北京航空航天大学新主楼四层的采集区域图,这一层被划分成7个区域,主要地点是不同的走廊。对于每个参考点,除了RSSI、SNR和Multipath等特征参数和区域号外,还标定了它们的相对位置坐标。图5和图6是室内外不同地点的FM广播信号强度分布图,表1是室内外数据库中存储的信息。
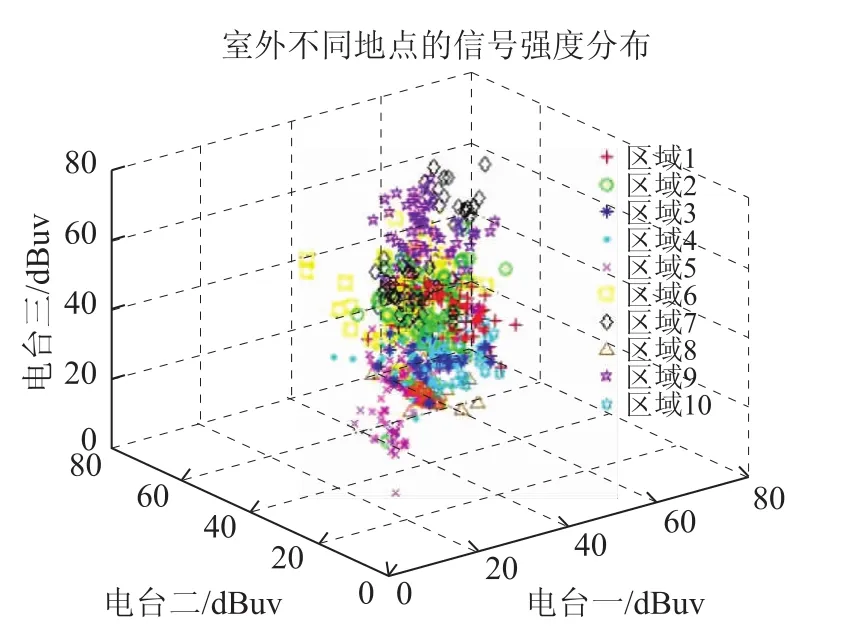
图5 室外信号强度分布图
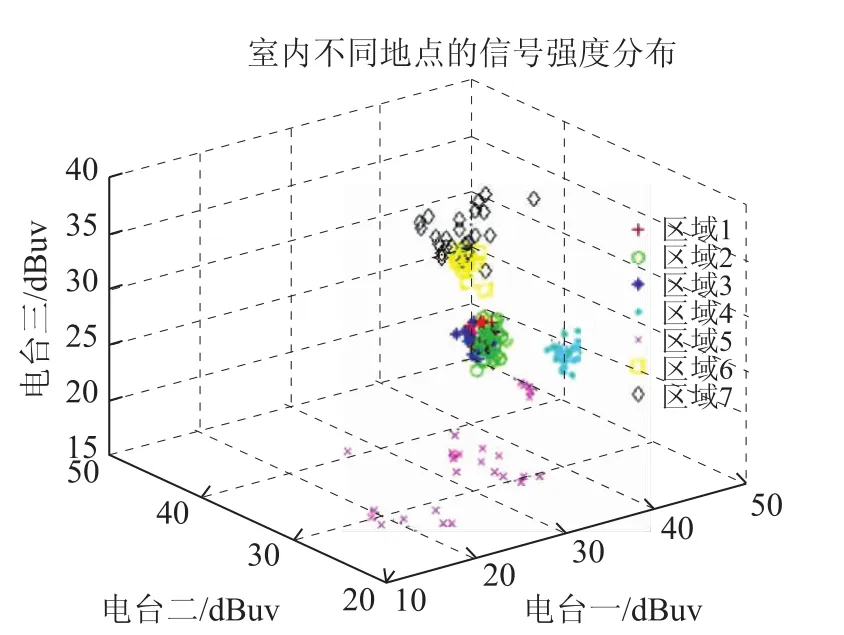
图6 室内信号强度分布图

表1 数据库中存储信息
2.2 实验结果分析
2.2.1 室内外区域级别定位结果分析
区域级别的定位实质上是一种分类的问题,本研究中主要采用的定位算法是KNN,将k个近邻参考点所在频率最多的区域作为测试点的区域。图7和图8是将三种特征参数分别作为输入的定位结果:

图7 基于KNN的室外区域定位准确率
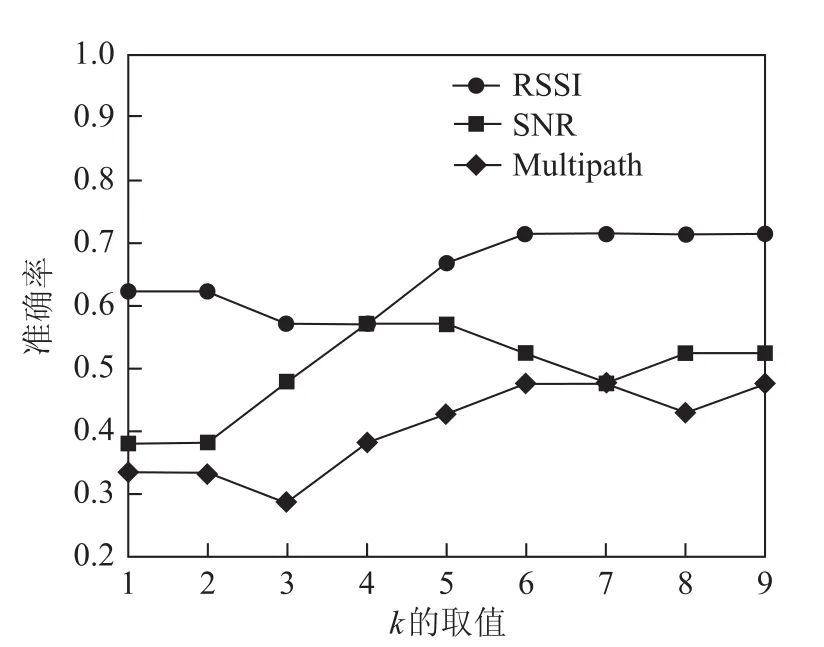
图8 基于KNN的室内区域定位准确率
由图7和图8可知,基于KNN的定位算法, k的选取对定位结果有很大影响。室外区域级别定位的最高准确率可以达到80.37%,室内最高可达到71.43%。分别比较基于RSSI、SNR、Multipath三种特征参数的定位结果,可以发现,基于RSSI的定位结果远远优于其他两种定位参数,原因可能是RSSI能更好的反映FM广播信号在某一环境下的特征。
图9是将三种特征参数融合后室外区域级别的定位结果。
由图9可以看出将这三种特征参数进行两两融合或三者融合后可以有效提升定位的准确率,最高的准确率能够达到90.80%。但是,由表2也可以看出,并不是特征参数融合的越多越好,要搭配适当才能出最佳效果,在以后的研究中可以考虑自适应融合,选取最佳搭配组合。
2.2.2 室内精确定位结果分析
在室内区域,对定位精度有着更高的要求,所以除了区域级别的定位外,还要研究精确定位。在室内的精确定位,主要采取KNN、KWNN和GPR定位算法。
图10是在图3实验区域进行的基于KNN和KWNN的实验结果分析:
由图10可知KNN与KWNN的定位结果极其相似,说明在本实验中,加权并没有改善定位效果。原因可能是近邻点与测试点的距离相差不大。在图3的113 m×42 m的区域里,定位的最小均方根误差是基于RSSI的17.84 m。
基于KNN、KWNN的定位算法,将三种特征参数融合后的定位结果如表3。
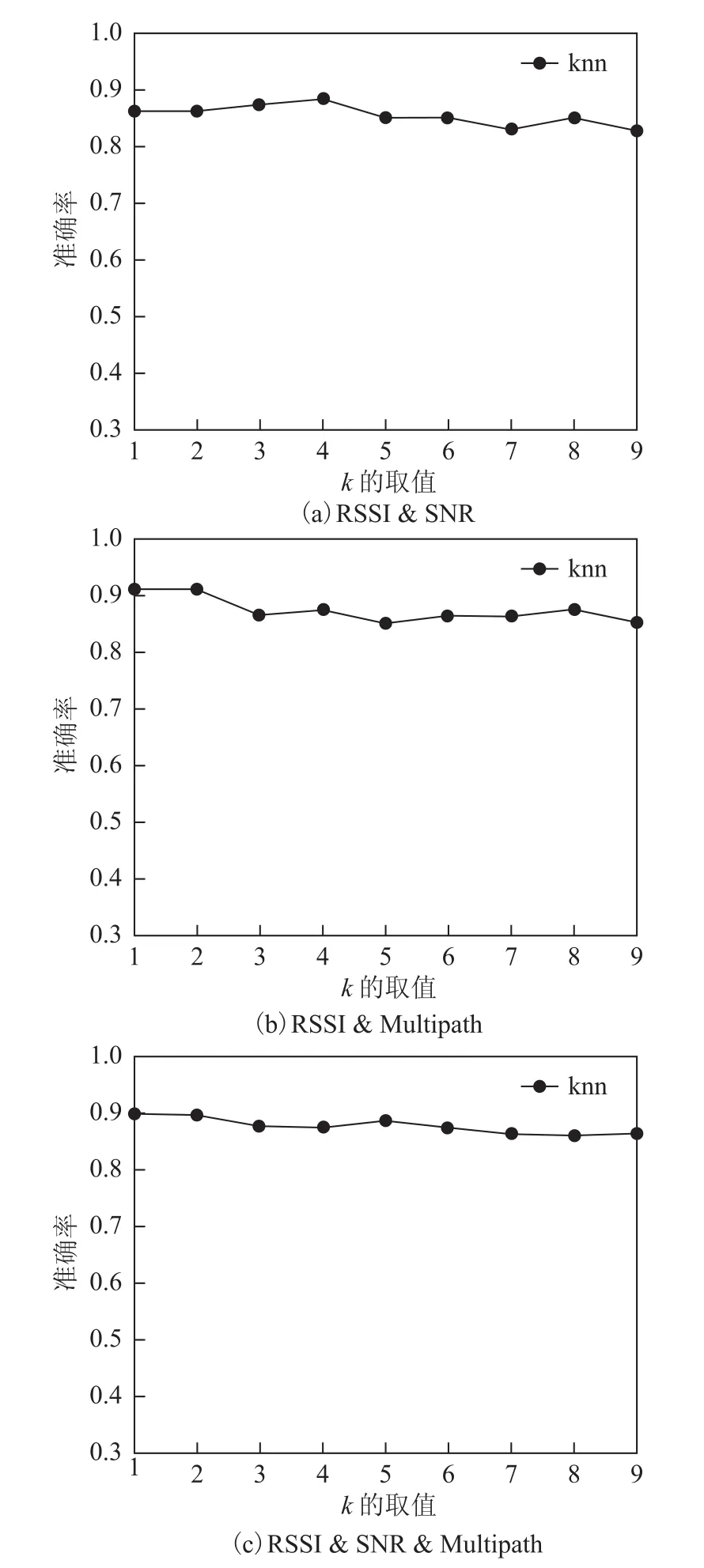
图9 基于三种参数融合后的室外区域定位结果
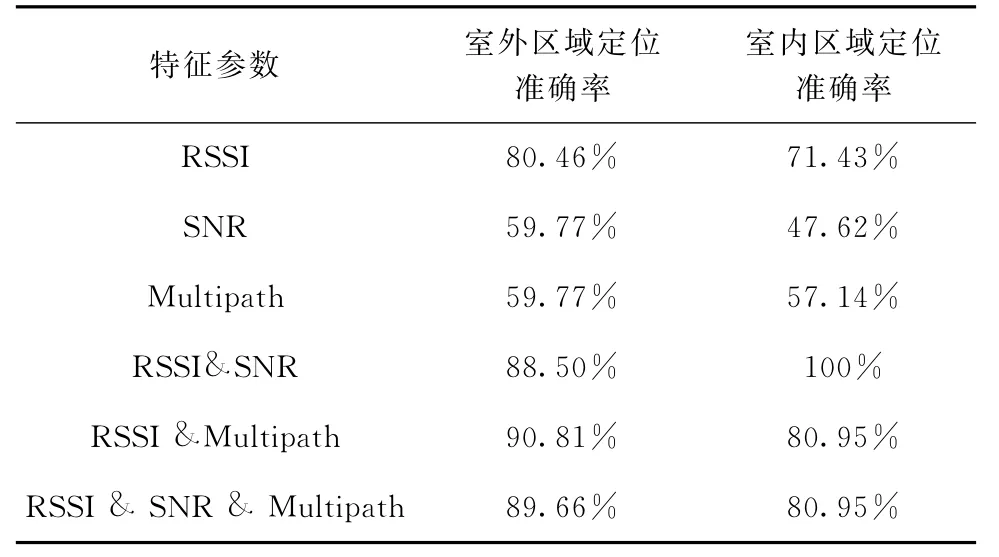
表2 基于不同特征参数的室内外区域定位准确率比较
对于GPR定位算法,因为GPR只能解决回归问题,不适用于分类问题,所以在本研究中只将其应用于室内的精确定位中,而且只将RSSI特征参数作为唯一的输入。通过将RSSI与位置坐标建立模型,得到的定位误差是13.34 m。图11是KNN、KWNN、GPR三种算法的误差累计分布函数(cumulative distribution function,CDF),如图11所示,GPR的性能要优于其他两种算法。
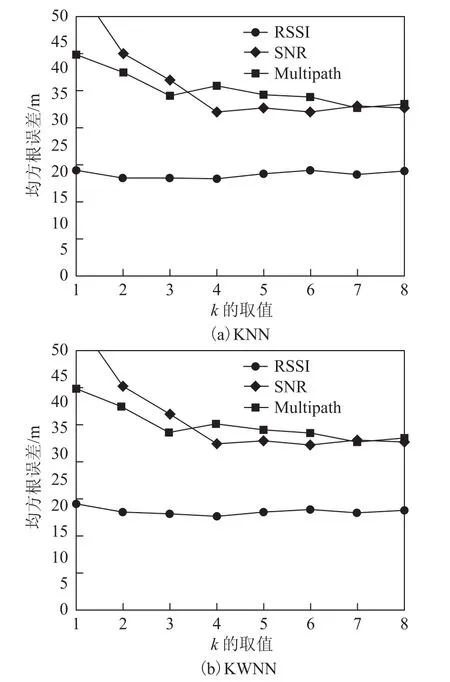
图10 基于KNN和KWNN的室内定位误差分析

表3 基于不同特征参数的室内定位精度比较
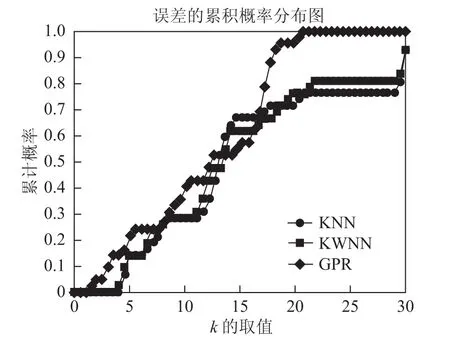
图11 三种算法的CDF图
3 结束语
本文提出了一种基于公共FM广播信号的定位方法,该方法利用了多种FM广播信号特征参数,采用指纹定位法进行定位。第一阶段采集室内外的FM广播信号特征数据库,第二阶段用KNN、KWNN、GPR三种定位算法进行了位置的解算。KNN与KWNN可用于区域级别的定位和精确定位,GPR只能用于精确定位。通过对实验结果分析,将多种参数融合后再进行定位可将室外区域级别定位准确率从80.46%提升至90.81%,室内区域级别定位准确率从71.43%提升至100%,室内精确定位误差从17.84 m降至11.16 m。在单独利用RSSI特征参数定位时,GPR比KNN、KWNN更有优势。下一步研究主要会从如何提升FM广播定位性能来进行,定位区域的适配性、特征参数如何组合都会在考虑范围之内。
[1] KRUMM J,CERMAK G,HORVITZ E.RightSPOT:A novel sense of location for a smart personal object[EB/OL]. [2014-09-10].http://research.microsoft.com/en-us/um/people/jckrumm/Publications%202003/rightSPOT%20publish.pdf.
[2] YOUSSEF A,KRUMM J,MILLER E,et al.Computing location from ambient FM radio signals[EB/OL].[2014-09-10]. http://research.microsoft.com/en-us/um/people/jckrumm/Publications/SPOT%20WCNC.pdf.
[3] PAPLIATSEYEU A,KOTILAINEN N,MAYORA O,et al.FINDR:Low-cost indoor positioning using FM radio[EB/ OL].[2014-09-10].http://link.springer.com/chapter/10.1007/978-3-642-01802-2_2?no-access=true#page-1.
[4] POPLETEEV A.Indoor positioning using FM radio signals[D].Trento:University of Trento,2011.
[5] MATIC A,POPLETEEV A,OSMANI V,et al.FM radio for indoor localization with spontaneous recalibration[J].Pervasive and Mobile Computing,2010,6(6):642-656.
[6] MATIC A,PAPLIATSEYEU A,OSMANI V,et al.Tuning to your position:FM radio based indoor localization with spontaneous recalibration[EB/OL].[2014-09-10].http://venetosmani.com/publications/fm_positioning_recalibration.pdf.
[7] PAPLIATSEYEU A,OSMANI V,MAYORA O.Indoor positioning using FM radio[J].International Journal of Handheld Computing Research(IJHCR),2010,1(3):19-31.
[8] YOON S,LEE K,RHEE I.FM-based indoor localization via automatic fingerprint DB construction and matching[EB/ OL].[2014-09-10].http://lens.csie.ncku.edu.tw/Library/Paper/ACM%20mobisys_2013/mobisys/p207.pdf.
[9] MOGHTADAIEE V,DEMPSTER A G,LIM S.Indoor localization using FM radio signals:a fingerprinting approach[EB/ OL].[2014-09-10].http://ipin2011.dsi.uminho.pt/PDFs/Shortpaper/32_Short_Paper.pdf.
[10]杨清.基于指纹的无线室内精确定位方法研究[D].杭州:浙江大学,2011.
[11]何志昆,刘光斌,赵曦晶,等.高斯过程回归方法综述[J].控制与决策,2013,28(8): 1121-1129.
Research on Location with FM Broadcasting Signal
SU Min,QIN Honglei
(School of Electronic and Information Engineering,Beihang University,Beijing 100191,China)
Because GNSS will be unavailable in a complex environment,a method using FM broadcasting signal to locate was proposed,which used many FM signal features and the fingerprinting technique to locate.The wide coverage,good stability and strong anti-interference ability ma k e FM broadcasting signal a good choice in indoor and outdoor positioning.The research focuses on the regional level location in the outdoor,while the accurate location is also in consideration in the indoor.In addition to the theory statement,several algorithms were applied and the experimental results were compared.It turns out that the outdoor regional level positioning accuracy can reach 90.81%,which is 100%in indoor environment,and the accuracy of indoor accurate positioning is 11.16 m.
FM radio;fingerprinting technique;outdoor positioning;indoor positioning
TN96
A
2095-4999(2015)-04-0044-06
2014-10-16
苏敏(1990—),女,内蒙古自治区包头人,硕士生,主要研究方向为基于FM广播的定位技术。
苏敏,秦红磊.调频广播定位技术的研究[J].导航定位学报,2015,3(4):44-49.SU Min,QIN Honglei.Research on Location with FM Broadcasting Signal[J].Journal of Navigation and Positioning,2015,3(4):44-49.
10.16547/j.cn k i.10-1096.20150409
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
内燃机与配件(2022年2期)2022-01-17
青少年科技博览(中学版)(2021年9期)2021-12-21
湖北农机化(2020年22期)2021-01-18
空间科学学报(2020年1期)2021-01-14
杭州电子科技大学学报(自然科学版)(2020年6期)2020-12-03
好日子(下旬)(2020年6期)2020-08-04
中国交通信息化(2019年12期)2019-08-13
消费导刊(2019年3期)2019-01-28
语文世界(小学版)(2015年12期)2016-01-22
