激光原向反射式单CCD立靶系统参数标定
2015-07-18 11:28赵冬娥李世伟
火炮发射与控制学报 2015年4期
霍 晗,赵冬娥,刘 吉,张 斌,李世伟
(中北大学电子测试技术国家重点实验室,山西太原 030051)
激光原向反射式单CCD立靶系统参数标定
霍 晗,赵冬娥,刘 吉,张 斌,李世伟
(中北大学电子测试技术国家重点实验室,山西太原 030051)
针对目前最新提出的激光原向反射式单CCD立靶测试系统中要求快速准确地对系统外部参数进行现场标定的问题,在对系统进行建模分析的基础上,提出了一种采用3个已知坐标的特征点,对所需标定的参数进行计算的方法。通过采集靶纸上3个已知坐标特征点的图像,分别计算3个点所对应实像和虚像的成像位置,结合已知坐标,即可标定出系统计算坐标所需的6个参数值。对于直径为7.62 mm的弹丸,使用该方法进行外部参数标定,弹丸着靶坐标测试精度可达5 mm以内。结果表明:该标定方法可快速且精确地对系统的各项外部参数进行现场标定,极大地提高了测试精度及测试效率。
CCD立靶系统;参数标定;特征点;测试精度
随着现代光电技术的不断发展,弹丸着靶坐标的光电检测方法已成为目前非接触式测试方法中最常用的手段[1]。由于线阵CCD相机具有分辨率较高且拍摄幅率快等优势,线阵CCD相机在弹丸着靶坐标测试中的应用已成为研究人员所研究的重点[2]。相对于目前国内主要研究的双线阵CCD交汇测试系统而言,激光原向反射式单线阵CCD弹丸着靶坐标测试系统具有成本低、安装调试方便、坐标计算简单及灵敏度高等优势。
测试精度是评价弹丸着靶坐标测试统的一项重要指标[3],而在由线阵CCD相机构建的弹丸着靶坐标测试系统中,线阵CCD相机的模型参数的标定对整个系统的测量精度有着直接的影响。目前,国内外所研究的参数标定方法都是针对双线阵CCD立靶测试系统而言的,主要采用的标定方法为采用高精度测量仪器对各项参数进行测量[4],如激光测距仪和经纬仪等。但采用这些辅助设备无法进行精确的现场标定,同时还提高了测试系统成本[5]。由于激光原向反射式单CCD立靶测试系统为目前最新提出的弹丸着靶坐标测试系统,寻求一种可快速准确地对其外部参数进行标定的方法是非常必要的,因此,笔者重点针对该测试系统外部参数的标定方法进行了研究,提出了一种采用3个已知坐标的特征点,对所需标定的参数进行计算的方法,并通过试验数据对该标定方法的可行性和准确性进行了验证。
1 激光原向反射式单CCD立靶系统
该系统的核心器件为线阵CCD相机、半导体激光器和原向反射屏,系统示意图如图1所示。
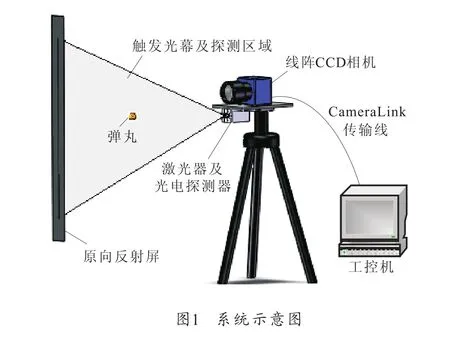
半导体激光器经柱透镜和鲍威尔棱镜整形扩束后形成扇形激光光幕,该光幕经原向反射屏反射后同时被线阵CCD相机及光电探测器接收,因此该激光光幕既作为系统的触发光幕,为系统提供触发信号,同时又作为系统的辅助照明光源,增强背景亮度。当弹丸通过触发光幕时,使得光电探测器上的光通量发生改变,经过信号调理电路将其转换为控制系统工作所需的触发信号。在弹丸经过探测区域时,由于弹丸遮挡激光器的出射光,在原向反射屏上会出现暗斑,该暗斑在CCD相机上会成一个较清晰的像;同时,弹丸会遮挡原向反射屏反射回CCD相机的光,被遮挡的这部分光会在CCD相机上成一个比较模糊的像,根据弹丸在CCD相机上所成的两个像相对于CCD中心的位置,即可求得弹丸的过靶位置。
2 系统外部参数标定方法
2.1 系统数学模型
为保证测试精度,首先要调节线阵CCD相机的视场面与激光光幕共面,因此,可对该系统建立一个二维空间的平面直角坐标系。选取系统中任意点为坐标原点,沿水平方向向右为x轴正方向,沿竖直方向向上为y轴正方向建立直角坐标系,如图2所示。假设相机的光心坐标为O(x0,y0),激光器出光孔的坐标为c(xc,yc),弹丸在CCD上所成实像的坐标为A(xA,yA)以及虚像的坐标为B(xB,yB),由于弹丸遮挡激光器出射光而在原向反射屏上形成的暗斑的坐标为E(xE,yE),弹丸的着靶坐标为P(X,Y),相机仰角即相机主光轴与x轴方向的夹角为α0。
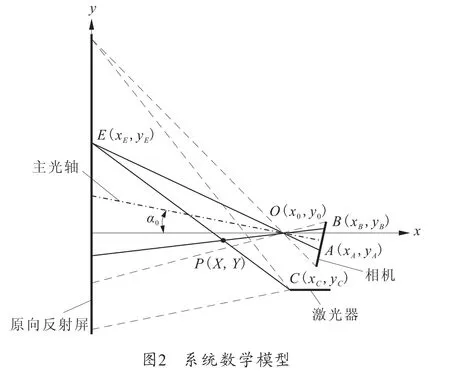
由图2可知,弹丸着靶坐标P为直线OB和c E的交点,因此,根据函数关系即可求得弹丸着靶横坐标X和纵坐标Y。

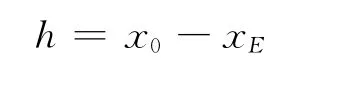
式中:a、b分别为过靶目标在CCD上所成实像和虚像距离CCD中心的距离;f为相机镜头焦距;ω为像元尺寸;h为相机光心到原向反射屏的距离,即:
2.2 外部参数标定原理
目前对于由线阵CCD相机构建的测试系统外部参数的标定所采用的方法,主要还是在系统搭建时通过一些精密的仪器来完成对各个参数的测量[6],通常采用的仪器有经纬仪和激光测距仪等。但是由于这些仪器自身的价格较高,测试过程也较为复杂,不仅增加了系统安装的复杂程度,同时也因为它们自身精度的限制影响了系统的测试精度[7-8]。因此,为了保证激光原向反射式单CCD立靶测试系统的方便性和准确性,必须寻求一种更加快速且精确的方法来完成对系统的标定工作。
由坐标计算式(1)可知,需要标定的外部参数有线阵CCD相机的光心坐标O(x0,y0)、激光器的出光孔位置c(xc,yc)、线阵CCD相机的仰角α0以及原向反射屏到相机光心的距离h共6个参数,因此,需要3个已知点来进行标定。
根据图2中所示的系统数学模型可知,在以任意点为坐标原点、水平向右为x轴正方向、竖直向上为y轴正方向建立的平面直角坐标系内,选取靶面内3个已知坐标的特征点Pi(Xi,Yi),其中i=1,2,3,这3个点在CCD上所成的实像相对于CCD中心的距离为ai,虚像相对于CCD中心的距离为bi。假设相机的成像面向上为正方向,根据空间三角关系,可以得出以下成像表达式:
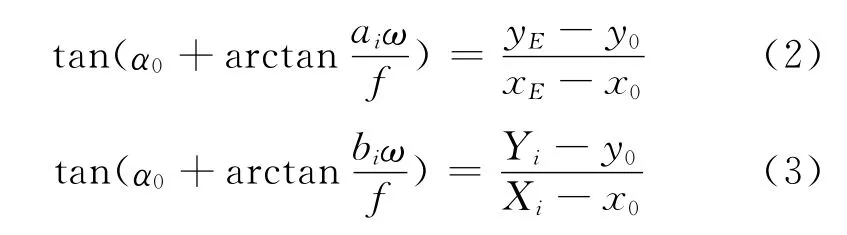
由于E点坐标(xE、yE)可根据直线OA求得,因此,根据式(2)可求得:

将3个特征点的坐标及各个点在相机上的成像位置等已知参数分别代入式(3)和式(4)即可求得测试系统的各个外部参数。
3 试验结果及数据分析
为了验证笔者所提出的标定算法的准确性,通过搭建系统进行了试验,试验现场如图3所示。
试验所采用的线阵CCD相机为德国Teledyne DALSA公司推出的Piranha4相机,该相机具有4k分辨率,TDI模式下拍摄幅率最高可达200 kfps,其像元尺寸ω=10.56μm。由于背景光较强,目标图像较暗,因此设置的曝光时间为4.9μs,镜头光圈值为5.6,焦距为50 mm。在该参数条件下,以靶纸左下角为坐标原点,水平向右为x轴正方向,竖直向上为y轴正方向建立直角坐标系,采集了3个静态点的图像,如图4(a)、(b)、(c)所示,分别为3个特征点P1、P2、P3在CCD上所成像的位置,这3个点所成实像与虚像相对于CCD中心的位置及这3个点在靶纸上的位置如表1所示。


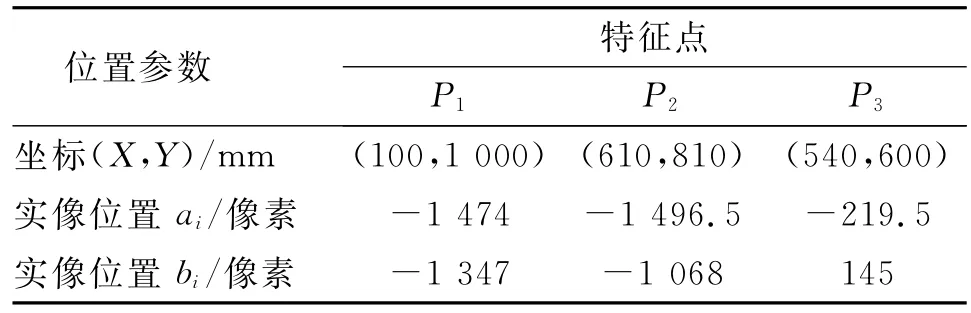
表1 3个特征点的位置参数
根据采集到的这组数据,采用笔者所提出的标定方法对系统进行标定,结果如表2所示。
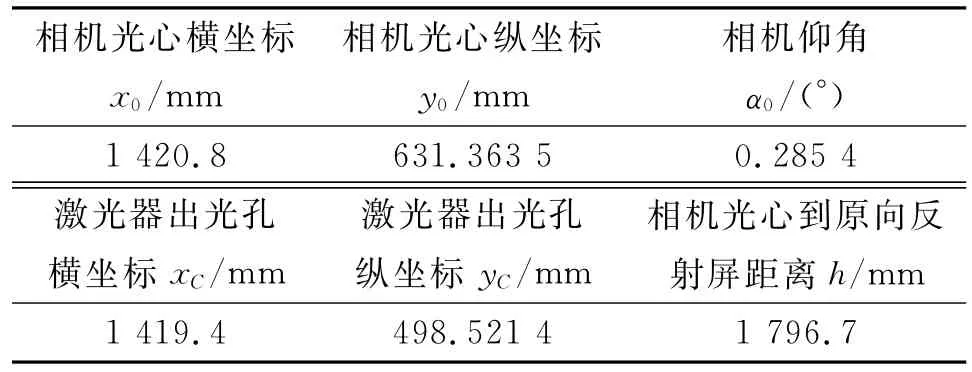
表2 外部参数标定结果
试验还使用线膛枪采集了5组直径为7.62 mm的弹丸的过靶数据,采用本次试验的标定结果对试验数据进行了计算,结果如表3所示。由本次试验结果可知,其测试误差均在5 mm以内,充分验证了该方法的准确性。
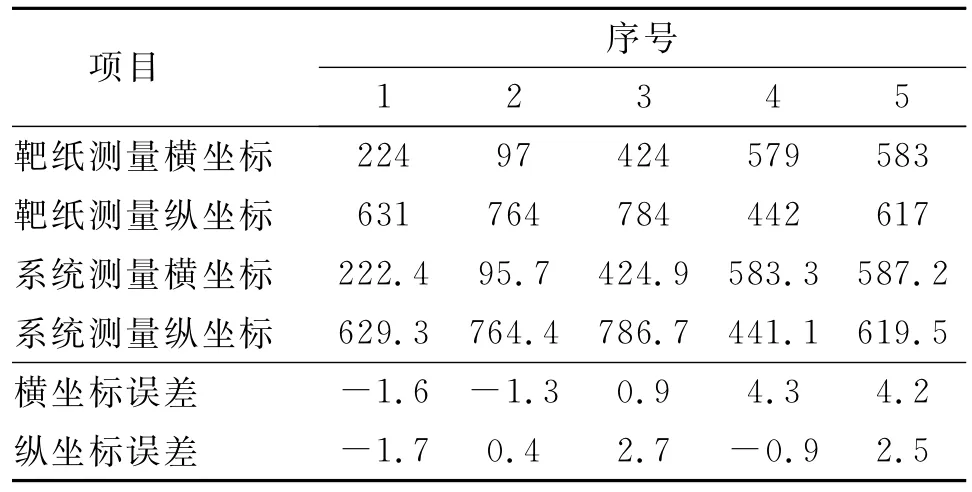
表3 5组弹丸着靶坐标mm
4 结束语
笔者所提出的采用3个已知坐标的特征点,对所需标定的参数进行计算的方法,重点是针对激光原向反射式单线阵CCD立靶测试系统而研究的一种标定方法,避免了系统中经纬仪及激光测距仪等精密测量仪器的使用,不仅降低了成本,还能更快速且精确地完成系统各项外部参数的现场标定,大大提高了该测试系统的效率和精度。
(Referenees)
[1]朱震星.CCD交汇大靶面系统标定关键技术研究[D].西安:西安工业大学,2013.ZHU Zhenxing.Research on the key technologies for CCD's large intersection target surface[D].Xi'an: Xi'an Technological University,2013.(in Chinese)
[2]张林.CCD光靶交汇测量技术及应用研究[D].南京:南京理工大学,2007.ZHANG Lin.The CCD optical target intersection measurement research with its application[D].Nanjing:Nanjing University of Science and Technology,2007.(in Chinese)
[3]王英,曾光宇.双线阵CCD交汇测量立靶精度系统研究[J].光电工程,2011,38(10):33- 38.WANG Ying,ZENG Guangyu.Intersection mesuring system of erecting target with dual liner CCD[J].Opto-Electronic Engineering,2011,38(10):33- 38.(in Chinese)
[4]李华.轻武器立靶坐标测量系统关键技术研究[D].西安:西安电子科技大学,2007.LI Hua.The key technologies studies for the smallarms vertical target coordinate measuring system[D].Xi'an:Xidian University,2007.(in Chinese)
[5]刘晶晶.室内线阵CCD立靶测试系统中关键问题的研究[D].西安:西安工业大学,2013.LIU Jingjing.The research of the key problem in the indoor line array CCD test system[D].Xi'an:Xi'an Technological University,2013.(in Chinese)
[6]李晶,袁峰,胡英辉.基于多点合作目标的多线阵CCD空间物体姿态测量[J].光学精密工程,2013,21(6):1636- 1641.LI Jing,YUAN Feng,HU Yinghui.Attitude mesurement of space objects based on multi-linear CCD and multi-point cooperation target[J].Optics and Precision Engineering,2013,21(6):1636- 1641.(in Chinese)
[7]张洪涛,段发阶,丁克勤,等.基于两步法线阵CCD标定技术研究[J].计量学报,2007,28(4):311- 313.ZHANG Hongtao,DUAN Fajie,DING Keqin,et al.Study on calibration of linear CCD based on two steps[J].Acta Metrologica Sinica,2007,28(4):311- 313.(in Chinese)
[8]朱虹,程松,王栋,等.双线阵CCD相机的畸变校正和标定方法[J].计算机工程与应用,2014,50(22):175- 179.ZHU Hong,CHENG Song,WANG Dong,et al.Camera calibration and lens distortion correction for binocular linear CCD[J].Computer Engineering and Applications,2014,50(22):175- 179.(in Chinese)
Parameter Calibration of Single CCD Vertieal Target System with Laser Retrorefleetor
H UO Han,ZH AO Dong'e,LIU Ji,ZH ANG Bin,LI Shiwei
(National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,Shanxi,China)
CCD vertical target system;parameter calibration;feature points;test precision
TN247
A
1673-6524(2015)04-0078-04
2015- 06- 03;
2015- 09- 21
教育部科学技术研究重点项目(No.211027);山西省研究生优秀创新项目(No.20143080)
霍晗(1991-),男,硕士研究生,主要从事高速运动目标着靶坐标测试技术研究。E-mail:nuchh@sina.com
赵冬娥(1970-),女,博士,教授,主要从事光电检测技术研究。E-mail:zhaodonge@nuc.edu.cn
Abstraet:For the purpose of solving the problem of finishing field calibration of external parameters efficiently and accurately in the single CCD vertical target system with laser retroreflector,which has been proposed lately,a method is proposed to calculate the parameters needing calibration based on the analyses of the system model,which obtains the result according to three feature points of the given coordinates.The image position is to be calculated respectively for the real image and virtual image of three feature points by processing their collected images.Combined with the known coordinates,the six parameters that are used to calculate the coordinates in system can be obtained.With external parameters calibration forø7.62 mm projectile through this method,the measurement precision of projectile impact location is less than 5 mm.The results indicate that this calibration method can be used to finish the field calibration efficiently and accurately of external parameters,greatly improving the precision and efficiency of the test.
猜你喜欢
小学生必读(中年级版)(2021年12期)2021-12-02
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
汽车维修与保养(2020年11期)2020-06-09
兵器装备工程学报(2020年3期)2020-04-22
兵器装备工程学报(2019年4期)2019-05-05
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
弹箭与制导学报(2018年5期)2018-02-21
电子制作(2017年23期)2017-02-02