基于CATIA/CAA的标准件库设计与实现
2015-08-26 02:47刘菡华
台州学院学报 2015年3期
刘菡华
基于CATIA/CAA的标准件库设计与实现
刘菡华1,2
(1.福州大学,福建福州350116;2.闽北职业技术学院,福建南平353011)
为了提高标准件的设计效率和装配效率,研究了标准件参数化设计技术以及基于位姿矩阵的快速装配技术,开发了基于CATIA/CAA的标准件库系统。
CATIA;CAA;标准件库;参数化设计;位姿矩阵
在机械制造行业中,机械产品结构的复杂性导致大量规格相似、系列化的标准件[1]被使用。标准件的设计和装配过程往往要进行大量的重复性劳动。随着全国范围内数字化制造技术的进步以及多年设计经验的累积,国内很多大型企业都形成了符合设计要求的标准件库,本文利用VS2005以及CATIA二次开发工具CAA-RADE,研究标准件参数化设计技术以及基于位姿矩阵的快速装配技术,开发了基于CATIA/CAA的标准件库系统,提高了标准件的设计效率和装配效率。
1 基于CAA的CATIA二次开发技术
CATIA是由法国达索系统公司开发,在航空航天等领域中有广泛应用[2]。图1为CAA V5组件应用架构图(CAA),它是达索公司提供产品扩展和客户定制的工具,采用面向对象的程序设计。在开发过程中,把交互的二进制模块组合起来,并将其功能集成起来共同完成应用程序。基于CAA的CATIA二次开发的实现通过RADE(快速应用开发环境)结合不同的CATIA V5 API接口函数来完成,CAA-RADE是目前所有高端CAD/CAM开发环境中最为复杂,同时也是功能最强大的一个。API接口通过调用CATIA中对象操作的方法和工具来实现程序的开发,也实现了与CATIA原系统的无缝连接。
2 基于CATIA V5的参数化设计技术
参数化设计技术,也叫尺寸驱动,通过在建模过程中对几何模型加以约束来控制模型几何形状大小和拓扑关系的方法,从而能够通过调整尺寸参数来修改设计模型,方便地创建一系列在几何形状上相似的设计方案[3]。参数化技术的约束可以同时对几何和拓扑进行约束,几何约束用于描述几何元素或者几何元素之间的形状、方向或位置等信息。拓扑约束主要是指几何元素之间的关系。一定数量的几何、拓扑约束可以唯一地确定一个几何模型,这种技术经过多年来的发展已经成为当今主流CAD系统的核心技术之一。
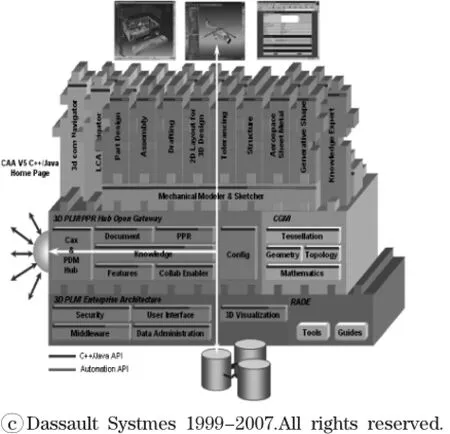
图1 CAA V5组件应用架构图
参数化设计方法以一种全新的设计思维方式将产品拆分为受一系列参数约束的几何模型。用户可以根据自己的需求方便地对已有的模型进行局部调整后生产新的几何和拓扑都相似的同类型产品。利用参数化设计的这种优势,可以将大部分标准化的零件制成实体参数化模型,利用参数在后台支撑几何模型的精确定义。这在一定程度上使产品设计人员从繁重的制图工作中解脱出来,极大提高设计速度,并且可以在原来的模型上不断扩充、丰富已有的模型库并减少数据冗余量。
参数设计表(Design Table)[4]是CATIA提供给用户的一个强大零件参数管理工具,它采用模型和参数分离的方式存储三维模型,这样有利于通过外部媒介如EXCEL来驱动三维模型。参数设计表表头为参数变量,包括标准件的所有外形参数尺寸,其余列均为该零件某一尺寸参数,涉及的每一行代表同类型零件的不同规格型号。这样,以EXCEL中标准件参数作为数据源,用户通过程序选择需要的型号,便可以由设计表中的数据来驱动标准件模型的生成。
3 基于位姿矩阵的快速装配技术
在传统的CATIA装配环境内部,标准件的位置是由位姿矩阵来表示的,按照标准件的局部坐标系和装配体的绝对坐标系重合进行定位的,当标准件尺寸相对较小或装配产品较大时,设计人员很难找到调入的标准件。为了提高装配效率,本文根据企业的实际需求,研究了基于位姿矩阵的标准件快速装配技术。
在计算机图形学理论中,几何变换提供了构造和修改图形的一种方法,图形在位置、方向、尺寸和形状上面的改变都可以通过几何变换来实现。在CATIA装配环境中,无论是移动标准件还是调整标准件的姿态,都要通过改变标准件的位姿矩阵来实现[5]。标准件的位姿矩阵包含了标准件的位置信息和姿态信息,是对标准件进行平移和旋转的信息依据。位置信息反映的是标准件相对于坐标系原点的信息,姿态信息是指标准件相对于坐标系原点沿各个坐标轴旋转的角度信息。三维图形的几何变换矩阵D可以用下列数组表示:
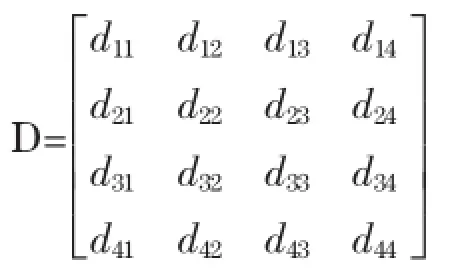
其中,矩阵D1=与比例、旋转、错切等几何变换相关;矩阵D2=[d41d42d43d44]与平移相关;矩阵D3=与投影变换相关;矩阵D4=[d44]与整体比例变换相关。
4 基于CATIA/CAA标准件库系统实现
4.1系统设计总体架构
标准件采用参数化建模设计技术进行建模,通过Design Table功能实现实例模型与驱动参数的分离,利用位姿矩阵实现标准件的快速装配。系统总体架构如图2所示。
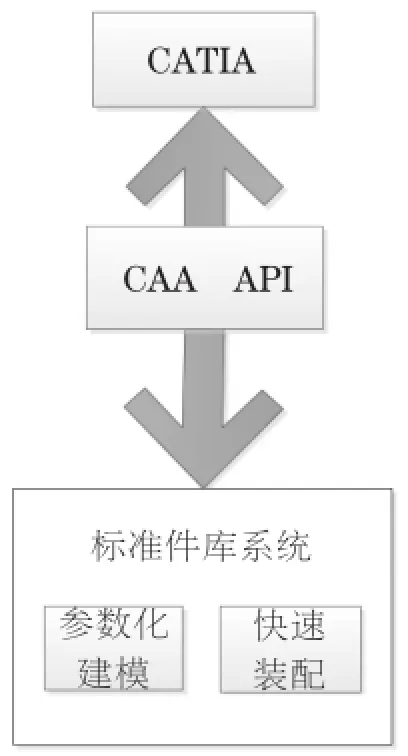
图2 系统架构图
4.2标准件参数驱动建模功能
标准件参数化驱动建模主要包括三个过程:标准件模型的调用、标准件参数的遍历以及标准件参数的驱动。标准件模型库建立后,依据设计要求,选定所需的标准件类型;标准件库系统根据选定的标准件类型后台自动调用相应的标准件模型,并获取该模型的根容器指针和零件特征句柄;最后遍历该模型的所有参数,获取用户输入的标准件参数,驱动生成符合设计要求的标准件。部分关键代码如下:
CATDocumentServices::OpenDocum ent(pFilePath,pDocument);//在后台打开标准件模型文件,其中pFilePath为模型文件的路径,pDocum ent为模型文档对象指针。
(CATIPrtContainer*)p InitOnDoc->GetRootContainer(“CATIPrtContainer”);//获取标准件模型的根容器,进而获取模型的零件的特征。
spPart->Query Inerface(IID_CATIParm Publisher,(void**)&piParm Publisher);//spPart为上述获取的模型零件特征,通过Query Inerface方法获取参数接口。
piParm Publisher->GetAllChildren(“CATICkeParm”,PartParm List);//CATIParm Publisher接口遍历获取模型的所有参数,再利用参数名称的匹配筛选出用户输入参数,驱动生成新的标准件实例模型。
4.3基于位姿矩阵的快速装配功能
为使零件可以在产品的绝对坐标系下进行移动,需要调用CAA-API的CATIMovable接口,它是管理移动对象的接口,可以在绝对坐标系下完成对物体的移动;位姿矩阵由CATMathTransformation类来表示的。首先通过交互方式得到标准件目标位置,存入 CATMathTransform ation类中,使用CATMathTransformation对象的GetCoef函数和SetCoef函数可以获取和重置矩阵值,然后将得到的矩阵进行矩阵变换。关键代码如下:
HRESULTrm=sp InstanceProduct->Query Interface(IID_CATIMovable,void**)&pCATIMovable);//通过查询组件所支持的CATIMovable接口,获得pCATIMovable接口,它可以得到并设置当前零件的位姿矩阵。
spPointAbs->GetAbsPosition(RefPosition);//交互操作得到的目标位置矩阵
pCATIMovab le->SetPosition(new RefPosition,NULL_var);//重置标准件的位姿矩阵
4.4应用实例
图3为标准件系统界面图,设计人员根据实际需要选取相应的标准件类型、相关参数和基于位姿矩阵的快速装配位置后,单击“确定”按钮即可完成所需标准件的建模。图4为某型号飞机通用工装标准件中快卸销(HB31562-78)的应用效果示意图。
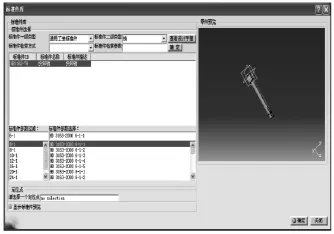
图3 标准件系统界面图

图4 实施效果
5 结束语
机械制造行业中,标准件的设计过程中存在着大量重复劳动,同时大量的标准件导致装配工作量巨大,本文利用参数化建模设计和基于位姿矩阵的快速装配技术,开发基于CATIA/CAA的标准件库,将繁琐的重复劳动利用代码封装起来,提高了设计效率和准确性。
[1]李原,彭培林,邵毅,等.基于 CATIA的标准件库设计与实现[J].计算机辅助设计与图形学报,
2005,17(8):1873-1877.
[2]Rantzau D,Maurer F,Mayer C,et al.The integration o f immersive Virtual Reality applications into Catia V5[M].Springer Vienna,2001.
[3]Myung S,Han S.Know ledge-based parametric design of mechanical products based on configuration design method[J].Expert Systems with Applications,2001,21(2):99-107.
[4]Taleb H,Musleh M A.App lying urban parametric design optim isation processes to a hot climate:Case study of the UAE[J].Sustainable Cities and Society,2015,14:236-253.
[5]曹俊生.基于 CATIA/CAA的飞机结构虚拟装配信息模型研究[D].南京:南京航空航天大学,2005.
(责任编辑:耿继祥)
Design and Im plementation of Standard Part Library Based On CATIA/CAA
LIU Hanhua1,2
(1.Fuzhou University,Fuzhou 350116,China;2.Minbei Vocational&Technical College,Nanping 353011,China)
In order to im prove the design efficiency and the assembly efficiency of the standard parts,the parametric design technology and rapid assembly technology based on the pose matrix of standard parts w as investigated,and the system o f standard part library based on CATIA/CAA was developed.
CATIA;CAA;standard part library;Parametric Design;the pose matrix
10.13853/j.cnki.issn.1672-3708.2015.03.008
2015-01-13;
2015-03-10
刘菡华(1984-),女,福建建瓯人,硕士,研究方向:CAD/CAM。
猜你喜欢
机械工业标准化与质量(2022年4期)2022-08-12
中国惯性技术学报(2020年4期)2020-12-14
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子技术与软件工程(2019年6期)2019-04-26
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
汽车零部件(2014年5期)2014-11-11
组合机床与自动化加工技术(2014年12期)2014-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01