基于原型测量的渤海导管架平台抗冰保障系统
2015-08-30 09:22王译鹤岳前进毕祥军
哈尔滨工程大学学报 2015年6期
王译鹤,岳前进,毕祥军
(大连理工大学工业装备结构分析国家重点实验室,辽宁大连,116024)
寒区海洋平台主要以固定式平台为主,分为桩式平台和重力式平台2种。其中,钢质导管架平台是目前冰区最普遍采用的一种结构形式。目前,渤海的许多钢质平台已经接近或达到了服役年限,继续服役的最大问题就是安全问题。然而,目前的寒区海洋结构的设计和安全评估都是从极端冰荷载出发,即只考虑最大静冰力或最大倾覆力矩是否能推倒平台。在冰与结构相互作用过程中,冰的破碎还产生交变荷载并引起结构的振动。实际上,从20世纪60年代美国在阿拉斯加库克湾的导管架采油平台就发现了冰激振动现象[1];20世纪70年代波斯尼亚湾的灯塔在冰激振动的作用下倒塌;80年代波弗特海的Molikpaq沉箱在冰激振动下地基发生砂土液化[2];我国渤海自20世纪80年代后期,在渤海辽东湾地区相继建造的多座平台,也发生了比较剧烈的冰激振动,2000年冬天,JZ20-2MSW平台剧烈的冰激振动造成平台上部连接法兰松动而导致天然气的泄漏,平台关井停产;持续的冰激振动对JZ20-2MUQ、JZ9-3平台的作业人员也产生影响,降低了舒适度和工作效率,严重时会危害其身心健康。最近,几座新建的简易抗冰平台在冬季发生强烈的冰激振动,相比传统导管架平台更加甚之,严重威胁上部设施。但由于海洋环境条件及海冰对结构物作用过程的复杂性,国内外目前对海冰的研究还远不能满足工程建设的需要。随着渤海油气资源开发规模的不断扩大,结冰期连续生产作业将成为不可回避的现实,因此,渤海冰期油气开发中的基于原型测量的导管架平台抗冰保障就显得至关重要。建立一套完备的原型测量系统需要考虑诸多方面,本文旨在建立渤海导管架平台抗冰保障系统的渤海原型测量系统各组成部分的设计与布置,并介绍渤海导管架平台抗冰保障系统的构成与运行。
1 原型测量系统
渤海为季节性结冰海域,且海冰在潮流的驱使下运动频繁。另一方面,相比高纬度海域海冰,渤海海冰厚度较薄,一般在10~20 cm,最大设计冰厚45 cm。
由于油气资源分布离散,渤海导管架平台的设计需要考虑经济因素,因此平台刚度明显低于库克湾的导管架平台[1],无法避免冰激振动。
完备的原型测量系统必须包括如下信息:
1)作用于结构水线处的冰力。理论上,作用于结构桩腿的总冰力,可以由结构上部位移,导管架平台水下局部应变等结构响应信息计算得到。然而由于结构自身复杂的多自由度响应,实事上无法实现桩腿总冰力的计算。另一方面,冰荷载研究更加关心海冰与结构接触面上的局部破坏行为,因此有必要进行如加拿大波弗特海沉箱结构Molikpaq上进行的冰力的直接测量[3]。
2)结构上部位移。这里需要指出,海洋上没有固定参考系,因此只能测量上部位移交变量。除结构上部位移以外,结构水下局部应变数据可以反映结构的整体变形,加拿大波弗特海的原型测量就曾利用这一数据[2]。渤海导管架平台JZ20-2NW进行了水下应变测量,这部分内容非本文重点,不作详细论述。
3)冰况参数。作用于结构的冰力及其引起的冰激振动取决于结构装腿水线处的形状、尺寸和冰况参数。最重要的冰况参数为冰厚、冰速、冰强度,它们决定了冰力幅值与周期。通常情况下,冰强度无法实现现场测量,而冰厚冰速可以通过特定的技术实现现场测量。
4)其他相关信息。海冰的生长与漂移取决于如气温、风速、风向、潮流等气象条件。因此这些气象数据也要同步记录,以便用来解释测量得到的冰力与结构响应数据。
图1所示为安装在导管架平台JZ20-2MUQ上的原型测量系统,包含用以测量上述数据的全部设备。
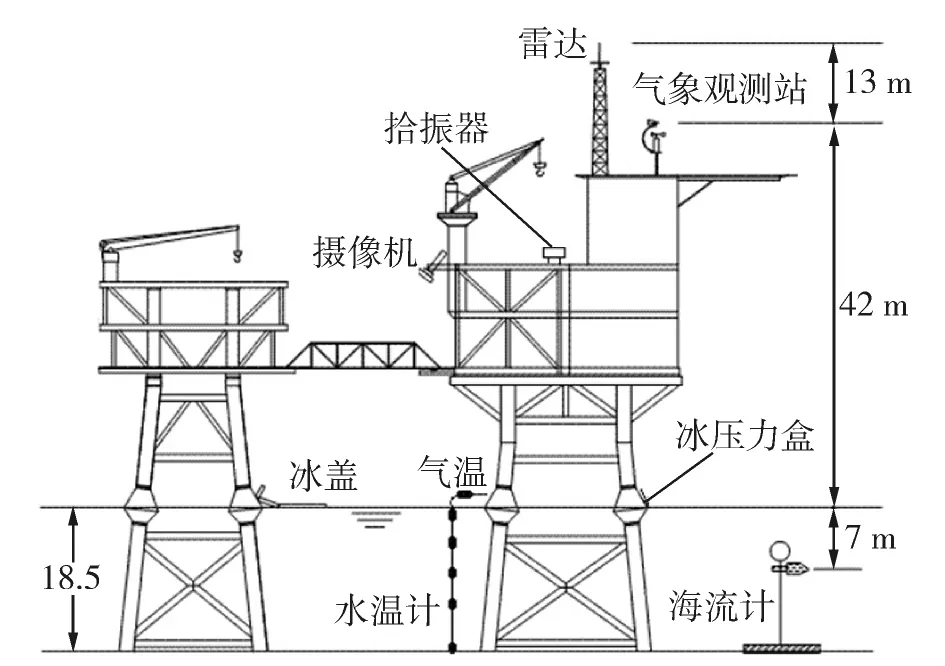
图1 JZ20-2MUQ平台上的原型测量系统Fig.1 Typical field measuring system on JZ20-2MUQ
2 压力盒
压力盒被安装在冰与结构桩腿之间作用界面上,以直接测量冰力。关于压力盒的设计与制造需考虑的问题,在许多文献中都有过讨论。渤海原型测量系统中的压力盒设计与制造主要考虑如下方面:
1)压力盒外形。压力盒的外形要保持与原结构一致。例如,如果测量结构为圆柱形桩腿,则压力盒必须与桩腿具有相同的圆柱形外形。
2)准确测量冰力的能力。压力盒必须具有足够的量程与灵敏度,并且有足够高的响应频率以记录冰力中的高频分量。
3)可靠性。考虑到环境腐蚀的问题。压力盒内的电子器件要做好防水密封。另外,如果压力盒要安装到已经建好的平台上,则要保证压力盒的安装过程简单快速。
考虑上述各方面,渤海原型测量系统中采用的冰压力盒的物理模型如图2所示。
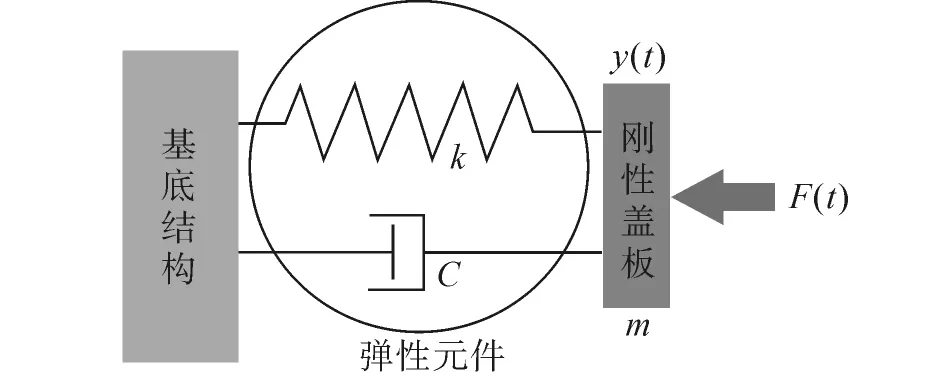
图2 压力盒结构简图Fig.2 Theoretical sketch of the ice load panel
渤海原型测量系统中共使用了2种压力盒,以便测量圆柱桩腿和锥体结构上的冰力,图3所示为锥体结构压力盒。压力盒采取分片布置以测量局部冰力。圆柱桩腿上的压力盒分为上下2行,每行6个分片,这样布置是为了适应潮位的变化,保证冰力的持续测量。

图3 圆柱腿压力盒,桩腿直径为1.5 mFig.3 Cylinder load panel,diameter of the leg is 1.5 m
3 结构响应
当导管架平台在动冰力作用下发生冰激振动时,响应主要集中在最低的几阶振型。在1999年和2000年冬季的早期原型测量中,导管架平台各层甲板上均布置了用以测量加速度的拾振器,以获得平台振动的整体振型。然而后续的数据分析表明平台主要以一阶振型振动,这样,只需测量某层甲板的一个位移信号,便可获得整个平台的振动信息。
渤海原型测量系统采用了891-II和891-Ⅳ这2种拾振器来测量导管架平台的位移或加速度。这2种拾振器很适于获取低频振动信号,满足渤海原型测量的需要。
4 冰况参数
如前文所述,现场可测量的最重要的冰况参数为冰厚和冰速,这2个参数影响着冰力幅值和动冰力的频率。至今已有多种技术被应用到冰速与冰厚的现场测量,例如加拿大波弗特海上的海冰厚度较大,且冰速较低,所以冰厚通过采样钻孔测量,冰速利用冰板上的传感器测量[2-3]。Norströmsgrund灯塔则采用了声呐和激光扫描技术来测量冰厚和冰速。
在渤海,海冰冰厚主要在10~20 cm甚至更薄,这样声呐技术无法满足测量的精度要求,所以渤海原型测量系统采用图像识别技术来测量冰速和冰厚以及海冰密集度。高分辨率摄像头被用以记录海冰图像,然后利用海冰图像提取冰厚,冰速和海冰密集度。
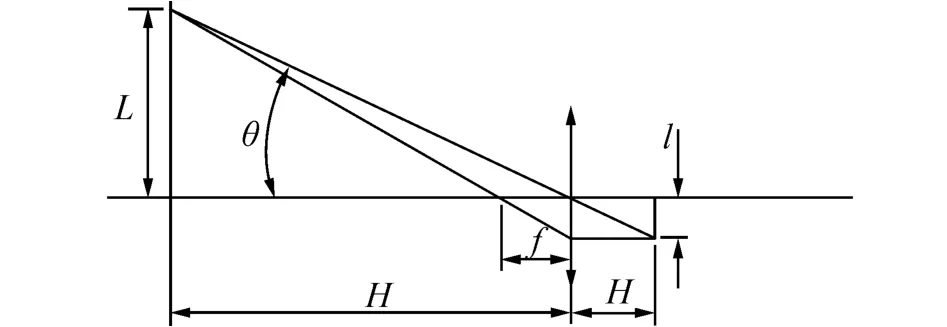
图4 通过视频提取冰厚原理示意图Fig.4 Theoretical sketch of the ice thickness estimation technique
图4所示为通过图像获取冰厚的原理。图像中的尺寸l取决于现场真实尺寸L,距离H和f,如果H远大于L且H为常量,则l与L近似为比例关系。

如果在现场布置一个已知长度L的物体,并记录图像中的像素点,这样便完成了真实尺寸与图像像素点之间的标定,这样,现场的真实海冰尺寸L可由图像中的像素点计算得到。
海冰冰速和运动方向的计算,主要是通过对不同时刻海冰图像中特征点的提取和匹配来实现。在采集的视频中,提取相同时间间隔的多帧海冰图像,并通过相邻帧图像间特征点的对比确定海冰的速度。特征点一般是指位于图像中不同高度区域交界处的像素点,一般使用角点特征以减小计算量,提高匹配速度。针对海冰速度的图像监测特点,渤海原型测量系统采用Harris算法进行海冰图像中特征点的提取。
Harris角度是一种基于图像灰度的检测方法,通过计算角点的梯度和曲率来确定角点,即确定图像中灰度变化剧烈的点。这里以2010年2月15日09:20时的海冰监测视频图像为例,其特征点及其在不同时刻的移动情况如图5所示。Harris算法的基本原理是取以目标像素点为中心的一个小窗口,并将窗口沿上下左右4个方向移动,计算4个方向上窗口内的灰度变化,并以4个值中的最小值为该目标像素点的角点响应函数值。若该值大于阈值,则为角点。Harris算法通过计算窗口沿任何方向移动后的灰度变化,并用解析形式表达[4]。
若定义二维像素点的坐标为(x,y),则Harris角点表示为
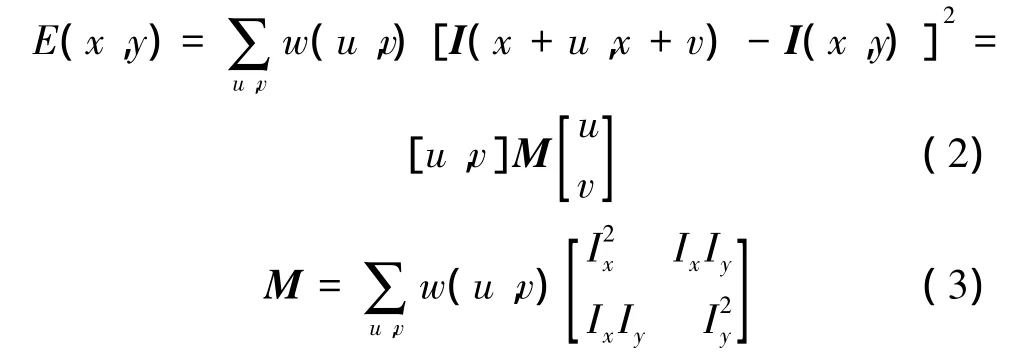
式中:Ⅰ为图像像素矩阵,w是降噪处理的平滑窗,(x,y)为相应图像像素坐标,Ⅰx和Ⅰy分别为图像像素在水平方向和垂直方向的一阶偏微商,Ⅰx2和Ⅰy2分别为图像像素在水平方向和垂直方向的二阶偏微商,(u,v)为偏移坐标。通过计算角点相应函数,可以检测出图像的角点,即:

通过Harris算子将特征点确定后,再通过相应的特征点匹配方法将不同图像中相对应的特征点对应起来,从而确定不同时刻海冰的移动位移。渤海原形测量系统采用了一种简单的引导互匹配算法进行特征点的匹配。当图片的特征点不明显的时候会产生误匹配点,并导致计算误差。这时就需要将误匹配点进行消除[5]。渤海原形测量系统采用了一种基于EM算法学习高斯混合模型(GMM)的聚类方法进行误匹配点的消除,该方法可以表示为

其中,

式中:φ(x;θj)是第j个混合分量,也是一个d维高斯密度,其中θj是其参数,wj是第j个混合分量的混合系数,k是混合模型中分量的个数。mj和σj是第j个分量的均值和协方差矩阵。用EM算法估计GMM的任务就是估计参数wj、mj和σj,并通过不断地更新以保证训练数据似然度单调地增加。
采用以上方法对图5中3个不同时刻(09:21:04、09:21:09和09:21:14)的海冰速度进行了确定,分别 为 (76.79 cm/s,278.19°)、(77.96 cm/s,278.86°)和 (79.26 cm/s,279.11°),其 均 值 为(78.00 cm/s,278.72°)。这里的流向以向上为 0°,顺时针旋转向下为180°。在海冰现场监测中为确定地理坐标上的冰向,需要对采集图像的角度进行标定。
渤海原型测量系统采用最大类别方差法对海冰图像中的海冰和海水进行分割。在海冰密集度的确定中最关键的问题是将目标(海冰)从背景(海水)中识别提取出来。渤海原型测量系统选用全局阈值分割方法对图像进行分割。首先用同态滤波方法增强图像,然后对图像进行边缘检测,并通过形态学方法对边缘图像进行修整。在得到海水与海冰的二值图像后,乘以射影矫正矩阵,计算其中白色像素区域占整个区域的百分比,便可得到海冰密集度。
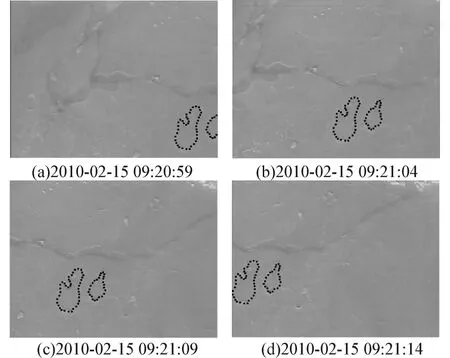
图5 海冰速度图像监测中特征点的提取示意图Fig.5 Sketch of the extraction of the characteristic point during ice velocity calculation using ice video
然而,当海冰受光照、阴影、天气等因素影响时,冰和水之间的界限不太清晰,这时简单的全局阈值方法不能满足精度要求。为此,渤海原型测量系统采用了自适应阈值方法,并做了如下3方面的改进,即对图像进行压缩以减小计算量,对灰度进行均衡化以增强图像对比度,估算最优阈值范围以简化分割算法[6]。假设阈值t将具有L级灰度的图像分割为2 类:C0∈[t,0]和C1∈[t+1,L-1]。对图像直方图归一化之后,得到灰度为i的像素分布概率为

式中:N为图像总像素数,ni为图像中灰度为i的像素数,则C0和C1出现的概率及均值分别为

根据最大类间方差法,计算C0和C1类的类间方差为

以上图像处理方法计算简单,稳定性强,并方便程序进行批量图像的处理。这里以2010年01月01日13:30在JZ20-2海域采集的海冰图像为例(如图6(a)),对其进行二值化后对海冰和海水进行分割(如图6(b)),由此得到海冰的密集度为86.1%。
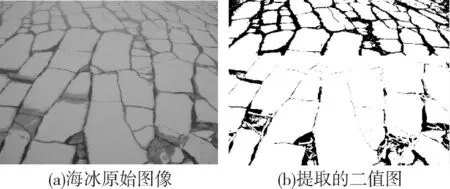
图6 海冰密集度计算(密集度为86.1%)Fig.6 Calculation of ice concentration(the concentration is 86.1%)
5 渤海冰激振动预报模型及平台抗冰保障系统
根据对渤海导管架平台失效模式的分析,海冰在圆柱桩腿导管架平台上的连续挤压破碎或海冰在桩腿加装锥体结构的导管架平台上的弯曲破碎导致的过大的平台上部加速度将导致平台上部管线设施的破坏和平台工作人员的不适[7-13]。因此控制平台上部加速度是平台抗冰保障的关键。
图7所示为桩腿加装锥体结构的导管架平台JZ20-2MSW一天中每5 min最大加速度曲线。显然导管架平台最大上部加速度取决于不同的冰况参数,及冰速与冰厚组合。渤海原型测量系统基于光滑粒子流体动力学方法(SPH)建立了海冰热力动力学模型来预报渤海海冰参数,该模型利用美国国家海洋与大气管理局的卫星图像和波海原型测量系统的现场数据提取计算的初始条件和相关参数。

图7 导管架平台JZ20-2MSW一天中每5 min最大加速度曲线Fig.7 Maximum acceleration of JZ20-2MSW in every 5 minutes during one day
图8所示为渤海辽东湾初始时刻(2000年1月25日08:40)后48 h的冰厚,冰速预测结果。
另一方面,基于大量的现场测量数据,最大平台上部加速度和不同冰速冰厚组合的关系被统计出来(对于圆柱桩腿导管架平台该关系只适用于渤海最为多发的随机动冰力模式)(图9)。
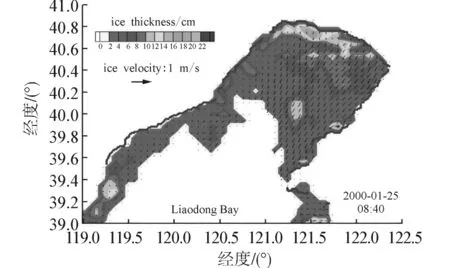
图8 渤海辽东湾初始时刻(2000年1月25日08:40)后48 h的冰厚,冰速预测结果Fig.8 Prediction of ice thickness and velocity in the Liaodong Bay of the Bohai Sea 48 hours later than the initial time(08:40 Jan 25th2000)
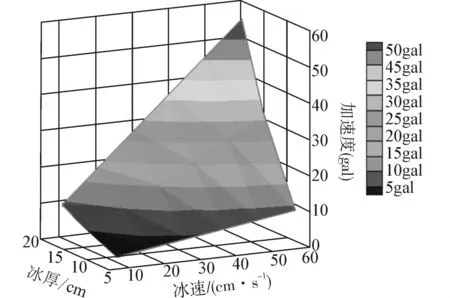
图9 JZ20-2MUQ平台上部加速度与冰速冰厚关系Fig.9 The relationship between the topside acceleration of JZ20-2MUQ and the combination of ice velocity and thickness
由此,结合美国国家海洋与大气管理局的卫星图像,渤海原型测量系统的现场数据,和最大平台上部加速度与不同冰厚冰速组合的关系,便可建立渤海导管架平台冰激振动预报模型。图10所示为桩腿加装锥体结构的导管架平台JZ20-2MUQ在48 h内最大上部加速度实测值与预测值的对比。
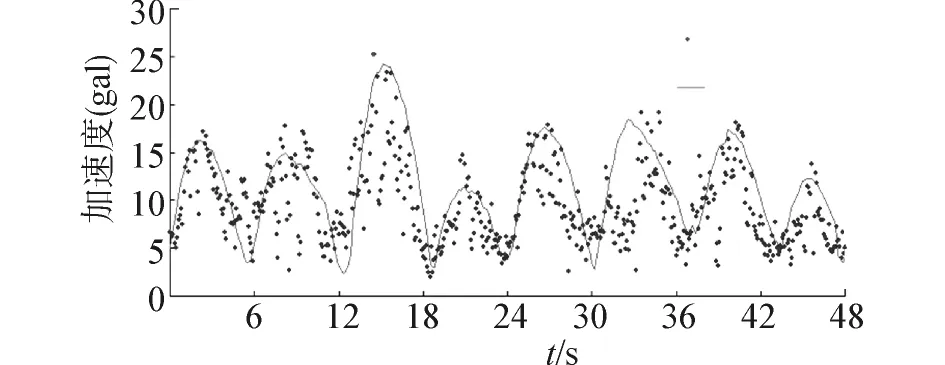
图10 导管架平台JZ20-2MUQ在48 h内最大上部加速度实测值与预测值的对比Fig.10 Comparison between the maximum topside acceleration field data and the maximum topside acceleration prediction of jacket platform JZ20-2MUQ during 48 hours
基于渤海导管架平台冰激振动预报模型,平台现场监测,和平台失效准则,渤海导管架平台抗冰保障系统得以建立(图11)。
渤海导管架平台抗冰保障系统根据冰激振动预报模型给出的平台最大上部加速度预测值或平台现场监测得到的最大上部加速度调动破冰船作业,以确保渤海导管架平台避免较大振动,保障平台安全。

图11 渤海导管架平台抗冰保障系统Fig.11 Safety guarantee of jacket platform in the Bohai Sea
6 结束语
在渤海的多座导管架平台上,一套完备的原型测量系统被设计并部署多年。该原型测量系统针对圆柱形桩腿和加装锥体结构桩腿设计、制造,并实施安装了不同的压力盒以实现冰力的直接测量。多个拾振器被安装于导管架平台甲板上,以测量平台的波动位移分量。由于渤海海冰相对较薄,因此采用高分辨率摄像头和图像处理技术来获取冰速和冰厚和海冰密集度等参数。包括冰力、结构位移、冰厚、冰速和其他相关环境气象参数在内的全部现场数据同步记录存储,基于渤海原型测量系统的现场数据,渤海导管架平台冰激振动预报模型和渤海导管架平台抗冰保障系统得以建立,保障了渤海导管架平台在冬季冰期的安全运行。
[1]PEYTON H R.Sea ice forces.Ice pressures against structures[R].Ottawa:National Research Council of Canada,1968:117-123.
[2]TIMCO G,JOHNSTON M.Ice loads on the caisson structures in the Canadian Beaufort Sea[J].Cold Regions Science and Technology,2004,38,185-209.
[3]TIMCO G,JOHNSTON M.Ice loads on the Molikpaq in the Canadian Beaufort Sea[J].Cold Regions Science and Technology,2003,37,51-68.
[4]CORDELIA S,ROGER M,CHRISTIAN B.Evaluation of interest point detectors[J].International Journal of Computer Vision,2000,37(2):151-172.
[5]黄锡山,陈慧津,陈哲.景像匹配误匹配点的剔除算法[J].中国图象图形学报,2002,8:783-787.HUAN G Xishan,CHEN Huijin,CHEN Zhe.Algorithms of eliminating the mismatching points in scene matching guidance system[J].Journal of Image and Graphics,2002,8:783-787.
[6]郭禾,傅新元,陈锋,等.任意视角的多视图立体匹配系统[J].计算机工程与设计,2007,28(12):2873-2877.GUO He,FU Xinyuan,CHEN Feng,et al.Integrated multiview stereo matching system with arbitrary viewpoints[J].Computer Engineering and Design,2007,28(12):2873-2877.
[7]WANG Y,YUE Q.Physical mechanism of ice induced selfexcited vibration[C]//Prod 22th Int Conf Port Ocean Eng Under Arctic Cond.Espoo,Finland,2013.
[8]SHKHINEK K,ZHILENKOV A,THOMAS G.Vibration of fixed offshore structures under ice action[C]//Prod 22th Int Conf Port Ocean Eng Under Arctic Cond.Espoo,Finland,2013.
[9]KÄRNÄ T,ANDERSEN H,GURTNER A,et al.Ice-induced vibrations of offshore structures-looking beyond ISO19906[C]//Proceedings of the 22th International Conference on Port and Ocean Engineering under Arctic Conditions.Espoo,Finland,2013.
[10]PALMER A,BJERKÅS M.Synchronization and transition from intermittent to locked-in ice-induced vibration[C]//Prod 22th Int Conf Port Ocean Eng under Arctic Cond.Espoo,Finland,2013.
[11]XU N,YUE Q,QU Y,et al,Results of field monitoring on ice actions on conical structures[J].Journal of Offshore Mechanics and Arctic Engineering, 2011, 133(4):041502.
[12]XU N,YUE Q.Mitigation of ice-induced vibrations by adding cones[J].International Journal of Offshore and Polar Engineering,2011,21(1):56-60.
[13]XU N,YUE Q.Mitigation of ice-induced vibrations by adding cones[J].International Journal of Offshore and Polar Engineering,2011,21(1):1207-1212.
猜你喜欢
声屏世界(2022年17期)2022-12-18
海洋通报(2021年3期)2021-08-14
成都信息工程大学学报(2021年2期)2021-07-22
小资CHIC!ELEGANCE(2021年45期)2021-01-11
少儿美术(快乐历史地理)(2019年6期)2019-10-12
英美文学研究论丛(2018年2期)2018-08-27
电子技术与软件工程(2016年24期)2017-02-23
通化师范学院学报(2016年11期)2017-01-15
剑南文学(2016年14期)2016-08-22
人间(2015年20期)2016-01-04