
基于工业机器人安全I/O接口控制系统设计
2015-09-02 08:29孙英飞罗爱华安徽埃夫特智能装备有限公司安徽芜湖241000
中国新技术新产品 2015年19期
孙英飞 罗爱华 徐 亮(安徽埃夫特智能装备有限公司,安徽 芜湖 241000)
高新技术
基于工业机器人安全I/O接口控制系统设计
孙英飞罗爱华徐亮
(安徽埃夫特智能装备有限公司,安徽芜湖241000)
针对工业机器人安全I/O接口控制系统,主要是将安全接口电路系统分为I/O接口系统和安全处理系统两部分组成,完成安全逻辑保护功能、伺服接口控制功能、PMAC轴接口功能、PMAC各I/O光电隔离处理以及外围通讯控制功能设计。通过现场大量的应用验证了此系统的正确性和可行性。
工业机器人;I/O接口控制系统;PMAC;光电隔离
随着科学技术的进步和人们对产品质量的要求,大量国外工业机器人已广泛应用于国内各大工厂的各条生产线上,但是工业机器人安全I/O接口控制系统在国内还是空白。目前各大工厂引进的国外机器人包括KUKA、FUNUC、COMAU等世界知品牌名机器人,而国产工业机器人却凤毛麟角,对工业机器人安全I/O接口控制系统的研究就更少了。针对目前机器人技术被国外垄断的局面,对机器人安全I/O接口控制系统的研究对成本节约和人机安全方面有着重要意义。这套系统用于国产ER165-C30重载点焊工业机器人上,并已投入奇瑞汽车公司焊装生产线应用直到现在,使得现场较多外围安全装置都能得到有效控制,I/O接口扩展方便,系统运行稳定,故障率较低,拥有防尘和散热保护,维修维护非常方便,不但能满足生产需求,而且性能稳定。
1 安全I/O接口控制系统设计内容
安全I/O接口控制系统主要分为I/O接口板和安全板两部分组成,整个系统完成安全逻辑保护功能、伺服接口控制功能、PMAC轴接口功能、PMAC各I/O光电隔离处理以及与外围设备通讯控制功能。
2 安全I/O接口控制系统整体介绍
工业机器人安全I/O接口控制系统实物如图1所示。
3 安全I/O接口控制系统各功能介绍
3.1安全逻辑保护电路
安全I/O接口控制系统的安全逻辑电路是通过判断PMAC看门狗报警和各种急停(包括机器人控制柜急停、机器人示教盒急停、用户外部急停、安全门急停、备用急停等),再由软件编程来控制伺服系统主电源的接通和断开,通过硬件逻辑电路处理和软件逻辑判断来实现对机器人的安全控制。
3.2伺服控制模块
安全I/O接口控制系统的伺服控制模块主要是实现各轴编码器信号的读取和发送、位置模式或速度模式的控制,每个轴的伺服使能、伺服准备、伺服报警和电机抱闸的控制。
3.3伺服使能
安全I/O接口控制系统的伺服使能主要是通过软件将PMAC使能输出置位,同时控制机器人各个轴使能。
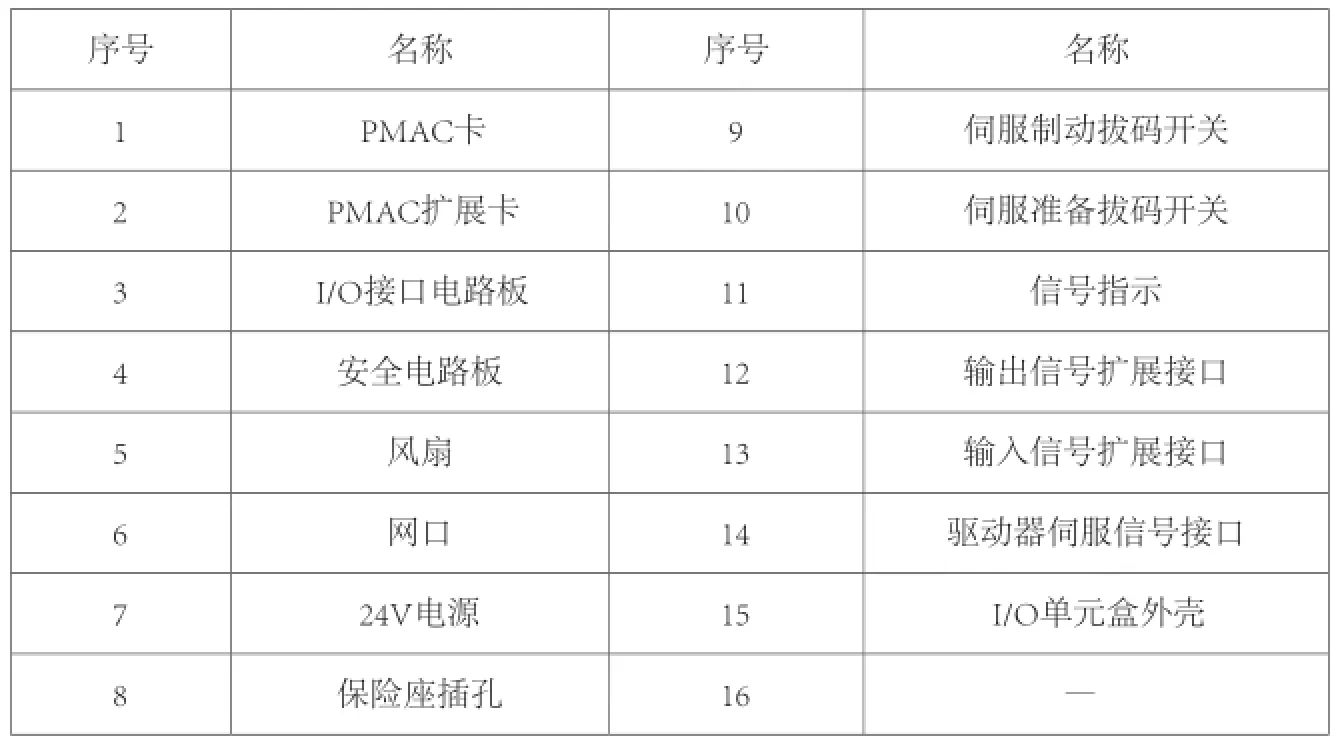
表1 安全I/O接口控制系统
3.4伺服准备
安全I/O接口控制系统的伺服准备主要是用来控制,当机器人各个轴的伺服均处于正常状态下,伺服驱动器才发出伺服准备信号,此时机器人才能将抱闸打开。
3.5伺服报警和拨码开关
安全I/O接口控制系统的伺服报警主要是用来控制,当伺服驱动器中任何一轴发生伺服报警时,机器人均产生伺服故障报警,机器人各轴电机输出抱闸信号使其抱闸,在伺服报警未清除或故障未解决之前,机器人无法运动。此时只有手动将伺服准备和抱闸拨码开关拨为ON状态,才能使各轴抱闸打开,才能使未发生伺服报警的轴使能运动。
3.6PMAC轴接口电路
安全I/O接口控制系统的PMAC轴接口电路主要是用来控制,PMAC与伺服之间的通讯、控制信号的转接和处理,编码器位置信号的读写、伺服使能、伺服报警、模拟量控制信号、脉冲控制信号、标志位、PMAC看门狗报警处理等。
3.7输入输出接口电路
安全I/O接口控制系统的输入输出接口电路主要是用来控制,将PMAC中各轴标志位和通用I/O经输入输出电路板用光电隔离处理。输入以高电平有效,输出通过继电器处理,提高带负载能力,高低电平均有效。可用输入24个,可用输出23个。输入输出均通过D型头连接。JJ1和JJ2为输入口,JJ3、JJ4和JJ5为输出口。
3.8指示灯信号
安全I/O接口控制系统的接口板各指示灯从上到下分别为开伺服、示教盒急停、再现、外部急停、安全门急停、备用急停、PMAC主控、PMAC看门狗报警、伺服准备、制动、使能、伺服报警。
结论
此工业机器人安全I/O接口控制系统,已经成功的运用到了安徽埃夫特智能装备有限公司所有的ER165-C30机器人上,机器人在生产过程中表现了良好的稳定性和安全性,也更好的解决了机器人与外围设备的信号交互,不但提高了机器人的运行效率,而且也保证了机器人的安全性。
[1]周孝成,孟正大.KUKA机器人运动学算法的研究[J].工业控制计算机,2014,19(09):64-67.
[2]刘金汉.点焊工业机器人系统的开发与研究[J].机器人,2000,22(07):156-161.
[3]兰文宝.基于PMAC的工业机器人控制系统研究与实现[D].哈尔滨工程大学,2013.
[4]陈红春.基于PMAC的开放式数控系统的研究[D].浙江大学,2006.
[5]黄坚,宋丽蓉.数控伺服系统位置控制模式的研究[J].电气传动,2005,12(08):23-26.
[6]门昌华,关学锋,胡明.基于PMAC的六自由度机器人开放式控制系统开发[J].机电产品开发与创新,2008,4(08):15-18.
[7]昕皓.基于PMAC的机器人伺服系统研究[D].东北大学,2009.
TP242.2
B
资金来源:国家高技术研究发展计划(863计划)课题。课题编号:2014AA041601。
课题名称:面向建材行业的经济型工业机器人应用示范。
猜你喜欢
河南农业·综合版(2022年3期)2022-04-08
装备制造技术(2019年12期)2019-12-25
铁道通信信号(2019年3期)2019-04-25
扣篮(2018年9期)2018-10-11
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
作文通讯·高中版(2016年3期)2016-04-22
中国农资(2015年49期)2015-08-09
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
