一种改进的边界扫描的路面裂缝检测算法
2015-09-06 08:54邱立英
盐城工学院学报(自然科学版) 2015年3期
邱立英
(福州大学 物理与信息工程学院,福建 福州 350000)
一种改进的边界扫描的路面裂缝检测算法
邱立英
(福州大学 物理与信息工程学院,福建 福州350000)
针对路面图像噪声较多、目标裂缝跟踪难等问题,分析对比了几种传统的经典边界扫描方法,如Sobel、Canny等算法,并根据路面裂缝图像的特点,提出了基于绝对梯度值的Sobel改进方法,使得边缘信息得到加强、减少了噪声以及伪边缘。经过后续图像的处理,能够较好地跟踪识别路面图像的裂缝信息。
边缘检测;路面裂缝;改进的Sobel;梯度算子
随着社会经济的快速发展,各种交通设施得到了前所未有的改善与提高。公路作为国民经济赖以发展的重要设施,在各国和地区的经济发展和建设方面起着关键性的作用。
路面裂缝是大多数公路病害的早期形式,如果没有进行及时有效地处理,在反复的人为因素以及自然因素下,病害则会加重[1]。路面裂缝检测技术是路面病害检测的重点和难点,世界各国都投入了大量的人力、物力和财力对路面裂缝技术进行研究和攻关,力争寻求一种高速、准确、安全、方便的自动检测方法。在分割算法领域,Tsai等[2]提议采用传统的大津阈值(OSTU)分割法来识别路面裂缝图像中的裂缝信息;在形态学领域,Landström等[3]利用了形态学的处理方法来自动检测路面裂缝,其中区域生长技术则是经常在各种图像处理中被应用[4];在其他领域,也有学者采用二维经验模式分解进行裂缝检测[5],其中基于多尺度的检测方法在裂缝识别上效果明显[6]。
针对路面裂缝图像的特点归纳总结了传统检测方法的优缺点,并依据图像的特点,提出基于Sobel的改进算法;将之应用到路面裂缝图像中,裂缝信息得到了很好地保留,也有效地去除了噪声,减少了伪裂缝信息,本文采用形态学处理改善图像质量,更好地消除裂缝中的各种噪声,并使断裂裂口得到准确地连接。
1 路面裂缝图像增强处理
1.1路面裂缝图像的特点
在采集到的原始路面图像中,内容信息可分为前景目标和背景两类对象,其中背景一般较粗糙同时带有不规则的三维信息及颗粒等噪声;前景即是要识别的目标裂缝对象,它存在一定的边缘信息,并与背景特征存在一定的差异。对路面图像的特征可归纳如下[7-9]:
1)由于路面一般是由沥青及混凝土铺设而成,其表面本身是粗糙、不规则的三维体,所获得图像纹理也不均匀。
2)相对于路面背景,裂缝处的像素灰度值较低,可认为是像素灰度局部最小值的集合。
3)路面图像中,不同位置处裂缝像素灰度值也有所不同,同时裂缝与背景之间的边界较弱。
4)代表裂缝的像素数量占整幅路面图像总像素数的比重比较小,裂缝一般较细小且粗细度不均匀。
5)路面图像背景复杂、不单一,路面背景的像素灰度值与表示裂缝目标的像素灰度值存在一定的重叠。
6)路面图像信噪比差,存在不同性质的噪声;裂缝像素空间连续性差,给裂缝的分割提取工作带来困难。
7)从频域上分析,路面图像频率幅值较复杂,具有高频、中频、低频等多种信息,在裂缝边缘处低频居多,并且边缘处的频率具有一定阶跃性。
基于路面图像的上述特征,要想准确分割提取目标裂缝,需要根据实际情况,融合图像增强、分割、表示与描述、目标识别等多项图像处理技术进行。
1.2路面裂缝图像增强
图像增强的最终目的在于突出图像变化剧烈的地方,增强目标信息。双边滤波是基于高斯滤波基础之上,对其中间的权系数进行部分改进之后,再与待滤波图像作卷积运算,加性零均值高斯噪声图像的模型如式(1)所示。

(1)
式中,g为噪声图像,f为无噪声图像,n为服从零均值高斯分布的噪声。滤波之后新的像素值如式(2)所示。
(2)
式中Sxy表示中心点(x,y)的(2N+1)×
(2N+1)大小的领域。每一个像素点g(i,j)都是由两部分的因子构成的。
(3)
(4)
(5)
双边滤波受参数s和r、滤波器半宽N 3个参数控制,在图像变化不剧烈的区域,相邻像素之间的灰度值变化不大,此时双边滤波器也就相当于高斯低通滤波器;而在图像变化比较剧烈的区域,则采用距离边缘点较近的点的亮度值来取代原值。因此双边滤波在平滑图像和保留边缘信息两者之间获得了平衡值。
2 结合改进Sobel算法的路面图像裂缝提取
2.1经典Sobel算法
边缘一般存在于图像信号的突变处,是图像灰度发生突变或不连续微小区域像素集合[10]。通过微分算子可以识别出图像边缘,对该点求取其灰度梯度,不管是一阶导数还是二阶导数,边缘点都可以表现出和背景显而易见的区别。
Sobelt算法考虑的是图像的3×3邻域,也是一种局部差分算子,以像素f(x,y)为中心的3×3邻域里,根据两个卷积模板,分别计算出X和Y方向的偏导数为:






(6)
Sobel算子梯度计算式为:
(7)
卷积计算得到的梯度值,其中的较大值作为新的灰度值。设定分割阈值T,大于T为目标,小于T即背景信息。
2.2改进的Sobel算法
基于经典的Sobel算法有两个检测缺点:一是抗躁性能差,二是因为仅仅使用两个方向模板,对其他方向的边缘检测效果并不理想。据此可对Sobel做两方面的改进。
改进1:增加6个方向的模板。
经典的Sobel算法卷积核,只有水平和垂直两个方向,导致在其他方向上的边缘点不容易检测出来,为此在这两个方向基础上再增加6个方向的模板,如图1所示。
改进2:把各方向卷积之后的梯度值取最大值和最小值,最大值与最小值之差作为新的梯度值。
如此改进的原因在于:对于边缘点而言,各个方向梯度相差很大;而噪声点则是各个方向梯度差不多。因此用最大值减去最小值,则噪声灰度值就接近于0,达到去噪目的;而对于边缘点来说,最大值减去最小值,结果还是较大的,并不会导致被漏检。也因为这个改进,本文称之为基于差值梯度的Sobel改进算法。
为了证实改进过后的Sobel在抗噪性能以及边缘检测效果上较经典的Sobel检测算法有很大的改善,本文通过选取一幅加了椒盐噪声和高斯噪声的图像来验证。实验结果如图2所示。
由图2可以明显看出,基于差值梯度的Sobel改进算法较经典Sobel算法抗躁性能得到了很大的提高,尤其是对高斯噪声的消除更为彻底,在保持边缘信息不消弱的同时最大程度地去除了噪声。
为了说明这种改进对于路面裂缝图像也具有同样良好的效果,现选取路面裂缝图像来做实验,从其边缘检测的完整度、伪边缘的减少等方面来分析检测效果,结果如图3所示。
从图3可以看出用本文算法对路面裂缝图像进行裂缝提取时,检测到了更多的边缘信息,表现在边缘信息得到了增强,伪边缘信息得到了减少。
总之,本文算法较经典算法表现为4个方面的优势:1)提高了图像的抗噪性能;2)增强了裂缝边缘信息;3)减少了假边缘信息;4)保留了更多的裂缝边缘信息,完整度更高。
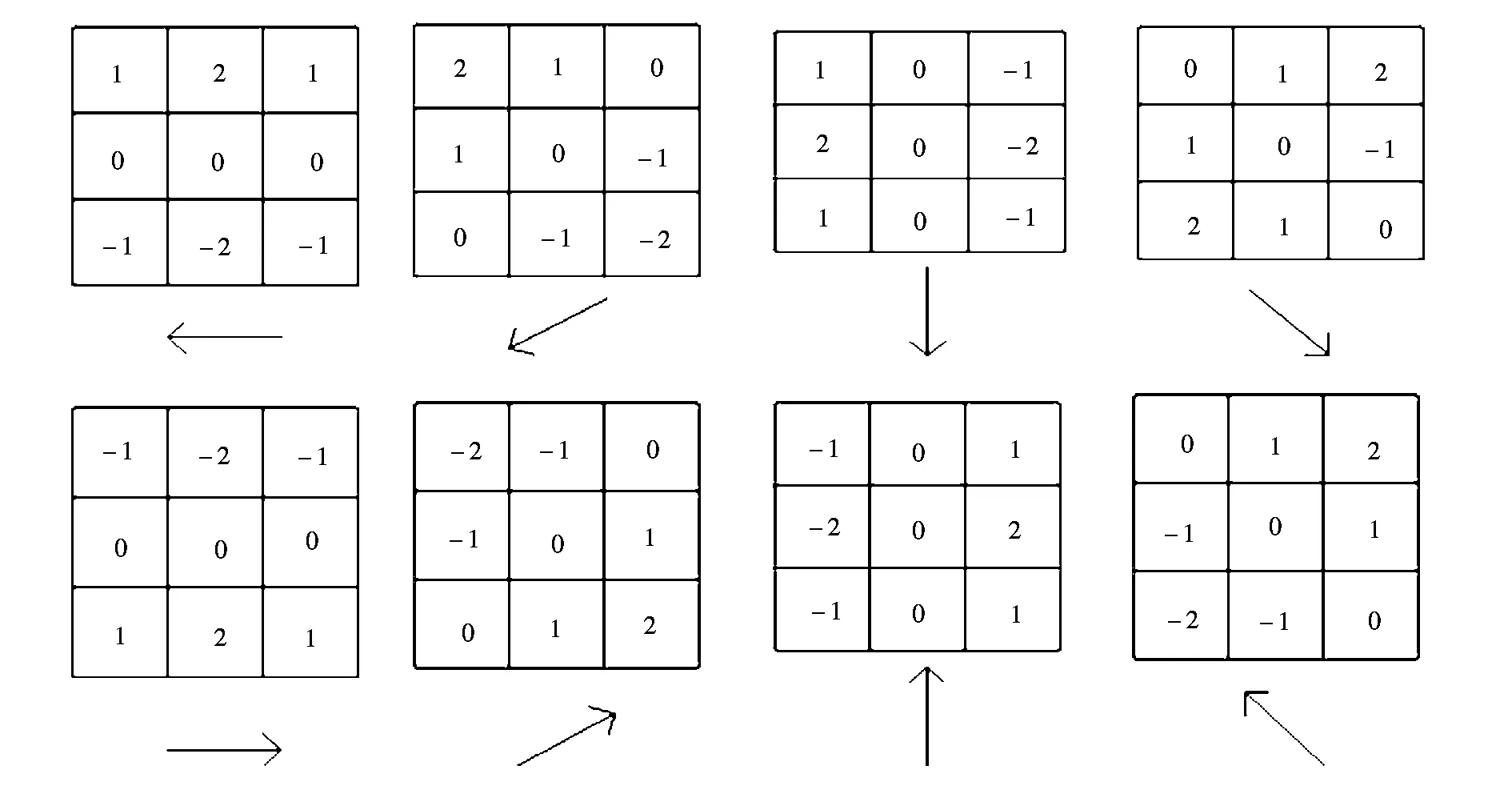
图1 改进sobel的各方向模板Fig.1 Directions of the template on the improved sobel
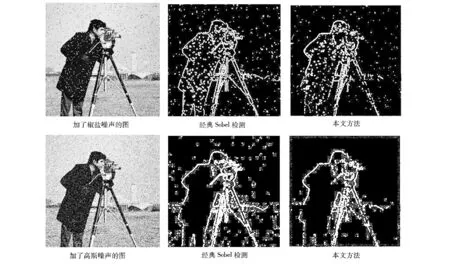
图2 本文算法对噪声图像提取边缘处理结果Fig.2 The results of the noise image with edge extraction in this particle
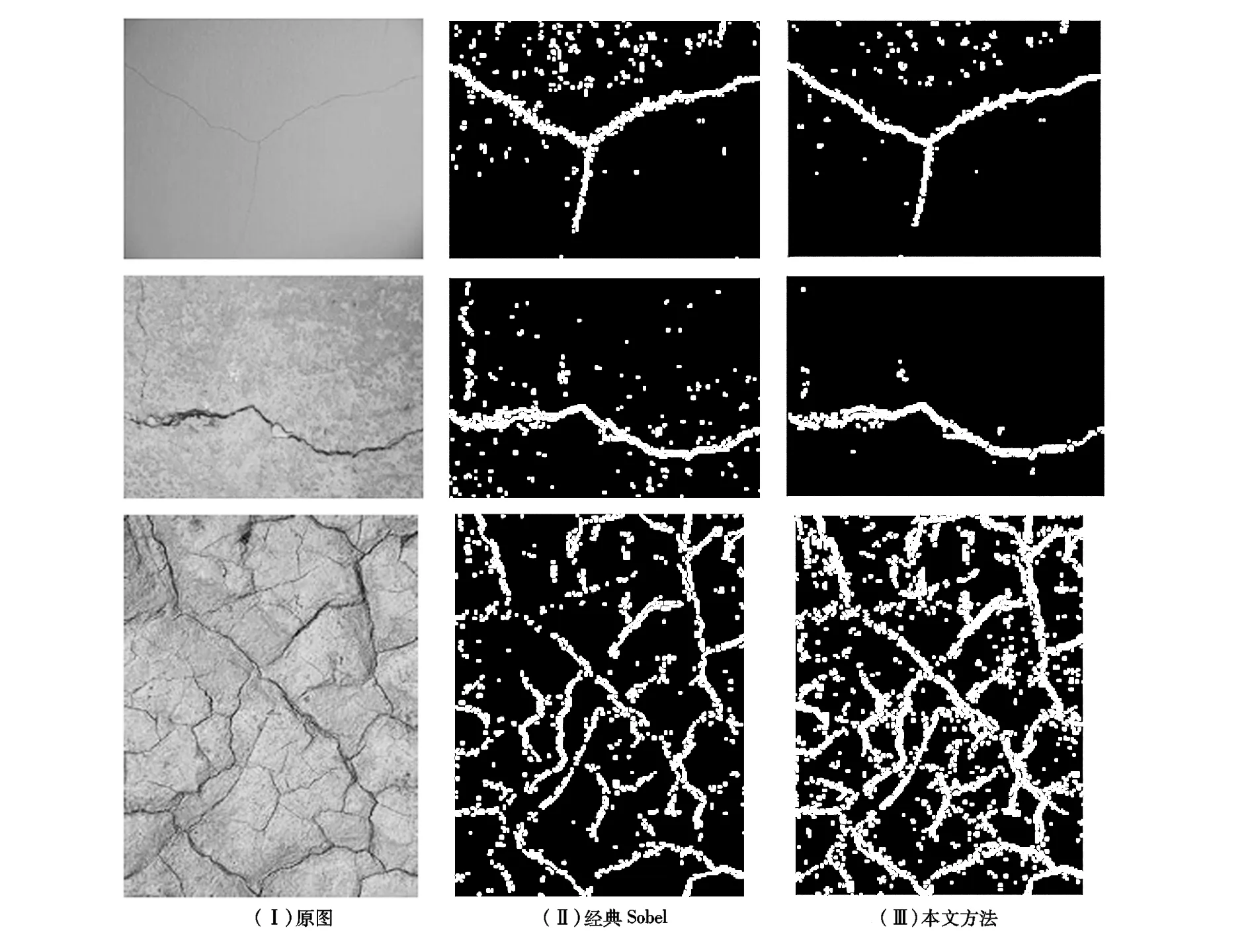
图3 本文算法对路面裂缝图像提取边缘处理结果Fig.3 The results of the pavement image with edge extraction in this particle
3 路面裂缝图像后期处理
3.1去除毛刺及伪裂缝
为得到目标裂缝的端点和长度信息,一般都要先对目标图像进行细化得到图像的骨架[11-12]。考虑到在骨架的端点处也可能会存在分支,采用长度阈值滤除的方法可能会丢失部分主干骨架信息,因此,在去除毛刺的同时应尽可地能保持骨架主体信息不丢失。
经过算法检测后的图像,存在许多短线毛刺噪声,目标裂缝也有断线。一般而言,短线是指其长度小于处理时的跟踪步长Tk,断线是指其跟踪长度不小于跟踪步长,但两线中间存在断裂间隙[13]。处理后图像的短线噪声大致有3种类型:①闭合的环形短线;②非闭合的曲线短线;③孤立噪声。为了能更好地消除这3类噪声,一般先采用形态学方法进行操作。膨胀操作可以连接图像中裂缝的各种较小的断裂口;腐蚀可以消除图像中的细小毛刺;先膨胀后腐蚀的操作不但可以使目标裂缝趋于光滑,而且还可以消除相应的孔洞环线噪声。
本文对毛刺去除算法进行了部分改进,具体步骤如下:
步骤1:当f(x,y)=255时, 该像素属于细胞骨架点,否则为背景点;当扫描到i像素时,若满足f(xi,yi)=255,则在像素点i的8邻域模板内统计f(xi+m,yi+n)=255的像素点的个数并计入Si,其中m,n={-1 0 1};重复此操作,直到所有像素点操作结束;
步骤2:对于二值图像中的像素点,如果Si>3,则记该像素点为线条分支点Pi;如果Si=1,则记该像素点为顶点Di;
步骤3:在原图像f(x,y)中去除记录的线条分支点Pi,从而产生多个不连通区域,然后进行连通区域标记,得到标记图fp(x,y);
步骤4:在标记图fp(x,y)中,从所有顶点Di像素开始计算Di所在的各个连通区域的长度信息,记作Ni;
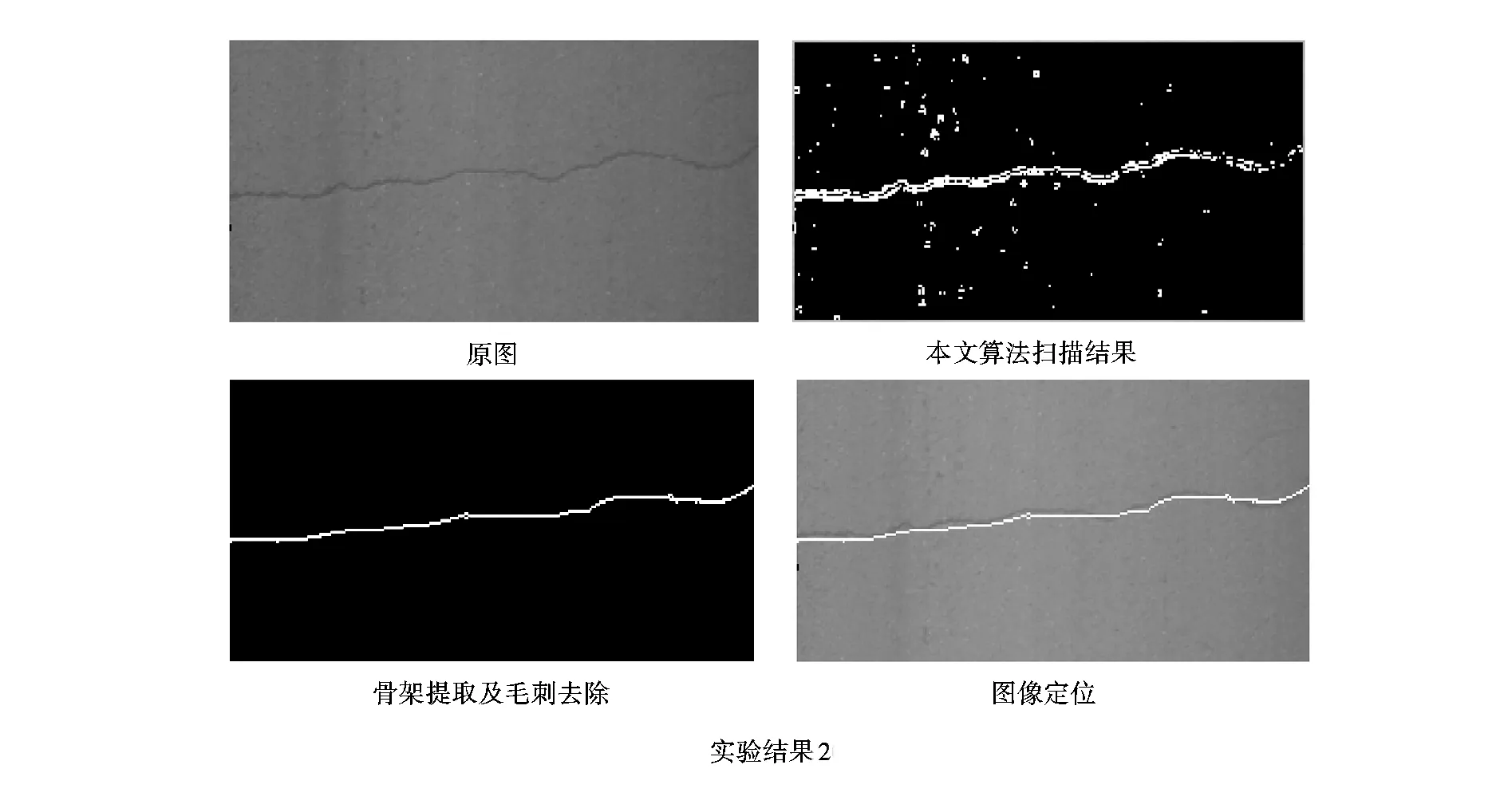
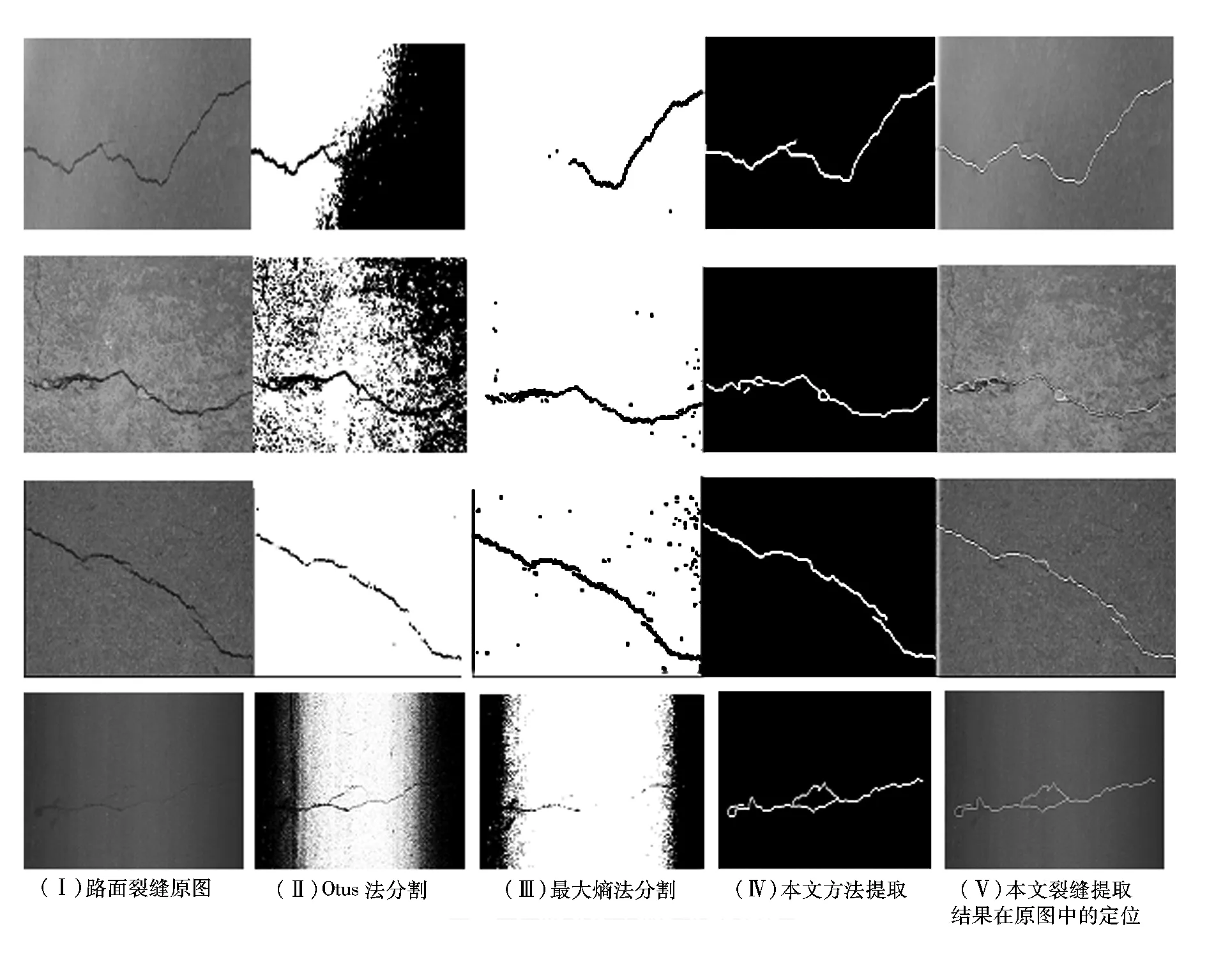
步骤5:设长度阈值T,取最小长度min(Ni),如果min(Ni) 步骤6:恢复暂时标记的分支点Bxy(重新赋值为255),得到毛刺去除的最终结果。 经过毛刺消除的裂缝存在断口,需要进行断口连接。经短线毛刺噪声去除后的裂缝存在一些断裂口,断口连接常用的传统方法是先找到断口端点像素,然后在端点像素周围搜寻是否有其它可连接的候选端点像素。若有,则根据该端点和候选端点之间的像素距离及其各种所在线段方向的角度差,来判断端点和候选端点是否能够连接。总体来说,断口连接的条件有两个:1)端点与端点之间的距离;2)端点所在线段方向的角度差。 3.2裂缝图像处理实验结果 采用本文方法进行边缘检测、形态学处理、细化骨架提取,进而进行毛刺去除和断口连接,并将最终检测的裂缝到原图进行定位,以验证本文算法的准确性。实验对每幅图像单独进行处理,各步结果如图4所示。 如图4可以看出,经过本文改进算法提取的裂缝经数学形态学处理及细化骨架提取后图像质量得到很大的改善,最终能检测出较完整、准确的裂缝。 图4 本文算法对路面裂缝图像提取边缘处理结果Fig.4 The results of the pavement image with edge extraction in this particle 图5 不同类型路面裂缝图像实验结果Fig.5 The results of different pavement images with edge extraction 本文还采用传统经典算法对其它不同性质、不同成像条件的路面影像图进行裂缝提取实验,结果如图5所示。 从图5容易看出,传统经典的分割方法效果并不理想,而本文改进的Sobel算法却可以得到相对较完整的结果。把裂缝信息与原图进行匹配对比,裂缝提取结果在原图中的定位显示了检测结果的准确性与完整性。实验结果很好地证明了本文算法较经典算法的优越性。 本文以准确检测路面图像中的裂缝为研究目的,选取适用于路面裂缝图像的增强算法,利用数字图像处理的相关方法,对路面裂缝进行提取与识别。传统的边缘提取方法对路面噪声敏感和算法本身的限制性而不适合路面裂缝的分割提取,而本文的基于Sobel的改进方法在裂缝提取上不仅具有较好的抗噪性能,而且还能提高裂缝提取的准确度。 在研究路面图像增强过程中提出的新算法充分利用了裂缝的灰度特点,综合应用了Sobel在图像边缘提升和细节纹理加强方面的优势。利用改进的边缘提取算法,并经过后期的局部处理,在路面裂缝图像中验证算法,得到了理想的实验结果,证明了算法的优越性。 [1] Ni Z P,Tang P H,Xi Y Y. A New Method to Pavement Cracking Detection Based on the Biological Inspired Model[C]∥Proceedings of 2012 International Conference on Computer Science and Information Processing.Xi'an:IEEE,2012,4(3):755-758. [2] Tsai Y C,Kaul V,Mersereau R M.Critical Assessment of Pavement Distress Segmentation Methods[J].Journal of Transportation Engineering,2009,136(1):11-19. [3] Arders, Matthew J,Thurley.Morphology-based Crack Detection for Steel Slabs[J].IEEE Journal of Selected Topics In Signal Processing,2012,34(6):866-875. [4] Li Q Q,Zou Q,Zhang D Q,et al.FoSA:F*Seed-growing Approach for Crack-line Detection from Pavement Images[J].Image and Vision Computing,2011,29(12):861-872. [5] Chambon S,Subirats P,Dumoulin J.Introduction of a Wavelet Transform based on 2D Matched Filter in a Markov Random Field for Fine Structure Extraction:Application on Road Crack Detection [C]∥Is&T/SPIE Electroric Imaging International Society for Optics and Photonics,2009(2):1-12. [6] Albert A P,Nii A O.Evaluating Pavement Cracks with Bidimensional Empirical Mode Decomposition[J].Journal on Aduances in signal Processing,2008(1):1-7. [7] Tsai Y C J,Vivek k,Arthony Y.Automating the Crack Map Detection Process for Machine Operated Crack Sealer[J].Automation in Construction,2013,31(6):10-18. [8] Nejad F M, Zaker H. A Comparison of Multi-resolution Methods for Detection and Isolation of Pavement Distress[J].Expert Systems with Applications,2011,38(8):2 857-2 872. [9] 徐志刚,赵祥模,宋焕生,等.基于直方图估计和形状分析的沥青路面裂缝识别算法[J].仪器仪表学报,2010,31(10):2 260-2 266. [10] 邓少平,张继贤,李平湘.极化SAR影像边缘检测综述[J].计算机工程与应用,2011,47(22):1-5. [11] 汤进,江波,罗斌,等.基于直方图的形状描述及骨架图匹配算法[J].华南理工大学学报:自然科学版,2010,38(7):27-32. [12] 杨松,邵龙潭,郭晓霞,等.基于骨架和分形的混凝土裂缝图像识别算法[J].仪器仪表学报,2012,33(8):1 850- 1 854. [13] 彭刚,王明江,闫至峰.一种处理指纹识别中短线和断线的新算法[J].计算机与数字工程,2008,36(11):140-142. (责任编辑:李华云) An Algorithm of Pavement Crack Detection Based on Edge Detection QIU Liying (Institute of Physics and Information Engineering, Fuzhou University, Fujian Fuzhou350000, China) The road is easy to be influenced by traffic load and natural factors.Pavement is easy to produce all kinds of breakage. Crack is a common form of most pavement diseases. In view of the difficulties such as pavement image noise and target tracking cracks, analyzing and comparing the several classical boundary scan methods, such as Sobel, Canny and other algorithms, according to the characteristics of pavement crack image, an improved Sobel method based on absolute gradient value was proposed. The edge information was enhanced, the noise and the false edges were reduced. After the follow-up image processing, the crack information was tracked and identified to the pavement image. edge detection; pavement crack; the improved Sobel; gradient operator 10.16018/j.cnki.cn32-1650/n.201503009 2015-02-24 国家自然科学基金资助项目(61170147) 邱立英(1992-),女,福建福州人,硕士生,主要研究方向为图像处理。 TP391.4 A 1671-5322(2015)03-0037-07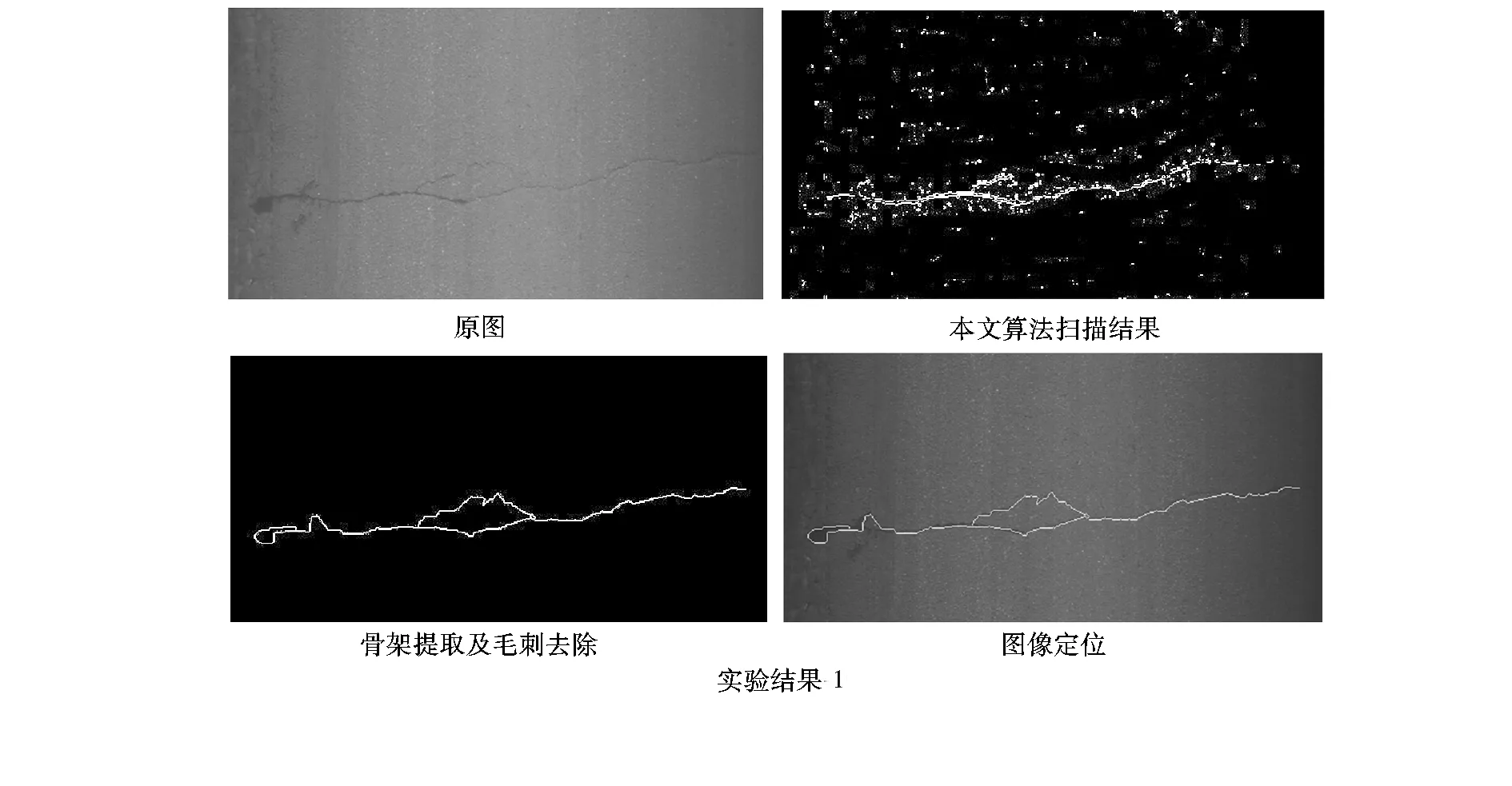
4 结论
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(军事科学)(2022年2期)2022-05-25
天津医科大学学报(2021年1期)2021-01-26
红领巾·萌芽(2019年8期)2019-08-27
中国与非洲(法文版)(2017年10期)2017-11-23
自动化学报(2017年5期)2017-05-14
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
雕塑(1999年2期)1999-06-28