大规模多节点模块化多电平柔性直流输电换流阀控制周期优化设计方法
2015-09-19 08:55吴金龙刘欣和姚为正
电力自动化设备 2015年1期
韩 坤,吴金龙,刘欣和,张 建,姚为正
(1.许继电气股份有限公司,河南 许昌 461000;2.西安许继电力电子技术有限公司,陕西 西安 710000;3.许继集团有限公司,河南 许昌 461000)
0 引言
基于模块化多电平换流器MMC(Modular Multilevel Converter)的柔性直流输电技术,以模块化程度高、开关损耗低、易于容量扩展和提高电压等级等独特的优势日益成为世界范围内研究热点并不断加快产业化进程[1-4]。随着电力电子器件和控制技术的发展,为进一步降低系统成本和工程造价,优化柔性直流输电系统配置并提高技术竞争力,高电压大容量已成为柔性直流输电技术发展的迫切需求。
MMC高压柔性直流电压等级的提升,受限于功率器件的电压耐受能力,需要更多的子模块串联构成换流阀。因每一个子模块均为独立的控制节点,换流阀控制设备(以下简称阀控设备)不得不面临更大规模节点控制,特别是在换流器输出较高电平数时,需要较短的控制周期,并且需在微秒级甚至更短的控制周期内同时完成大规模节点的同步触发、高速通信、脉冲分配以及子模块电压的均衡控制等核心功能,这无疑大幅增加了阀控设备软硬件设计的复杂度,对换流阀平稳可靠控制提出了严峻挑战。可见,制约换流阀大规模节点控制能力的关键因素为换流阀控制周期(以下简称阀控周期),如何优化设计阀控周期,既能保证换流阀的控制性能,又不明显增加阀控设备软硬件设计的复杂度,成为大规模多节点模块化多电平柔性直流输电技术的关键研究点。
现有的文献中,涉及MMC柔性直流换流阀控制周期的文献比较少。文献[5]分析了MMC电平数的选取原则,给出换流阀的2个临界控制周期与电平数的数学关系,但未给出位于2个临界周期之间的控制周期与电平数的关系,且仅限于电平数选取原则的阐述;文献[6-11]主要涉及换流阀子模块数的优化设计、桥臂环流机理分析及控制,以及桥臂子模块电容电压的平衡控制等,虽关系到阀控设备的核心算法的优化设计,但均未涉及换流阀控制周期的研究。
本文基于MMC换流阀控制原理和调制方式,提出从与换流阀控制保护性能密切相关的3个关键指标(换流阀电平数、直流电压波动限制、换流阀解锁交流电流冲击限制)综合优化设计换流阀控制周期的方法,为大规模多节点MMC柔性直流输电阀控设备的软硬件优化设计奠定了理论基础。
1 MMC工作原理
MMC主电路拓扑如图1所示,每个桥臂由n个子模块SM(Sub-Module)与桥臂电抗器L串联组成,同相的上、下2个桥臂构成一个相单元[12-15],各桥臂子模块按正弦规律依次投入,上、下桥臂电抗器的连接点为换流器交流电压输出口,分别输出三相交流相电压uA、uB、uC。为保持直流电压稳定,在不考虑冗余的情况下,上、下桥臂的子模块对称互补投入,任意时刻上、下桥臂投入子模块数之和为定值n。
2 MMC控制系统架构与调制方式
2.1 MMC控制系统架构
如图2所示,MMC柔性直流输电控制保护系统总体为包括系统级、换流站级、换流器级和换流阀级控制保护的4层控制架构,其中换流阀级控制位于控制的最底层,根据换流器级的控制保护指令完成对换流阀最直接的控制和保护功能,需在微秒级甚至更短的控制周期内完成高速通信、脉冲分配、同步触发、子模块电压均衡控制及换流阀保护等核心功能。出于换流阀设备的安全和运行可靠性考虑,换流阀级控制在所有控制层中具有最高的控制保护优先级,决定了阀控设备具有最高的软硬件复杂度。

图1 MMC主电路拓扑Fig.1 Main circuit topology of MMC

图2 MMC控制系统架构Fig.2 Architecture of MMC control system
2.2 MMC调制方式
对于MMC柔性直流输电系统,既要求换流阀输出较高的电平数以保证输出交流电压满足谐波要求,又要保证换流阀子模块具有较低的开关频率以降低换流阀损耗,一般采用最近电平控制NLC(Nearest Level Control)[16-18],其原理框图如图 3 所示。

图3 最近电平控制Fig.3 Nearest level control
图3中,uarm_ref为桥臂参考电压,与子模块正常运行时的平均电压Usm相除后,经过取整运算后得到当前桥臂投入的子模块数,桥臂控制器根据当前时刻的桥臂电流方向对桥臂内所有子模块电压进行排序,最终生成桥臂子模块的触发脉冲,完成最近电平控制。本文对于阀控周期的研究,正是基于最近电平控制方式。
3 阀控周期优化设计指标选择
阀控周期的优化设计指标的选择取决于阀控周期对换流阀控制保护性能影响的物理本质。以下基于模块化多电平换流阀控制的机理以及阀控设备本身数字控制的特点,揭示阀控周期对换流阀影响的物理本质,从而引出阀控周期优化设计的指标。
根据柔性直流控制系统分层架构,换流阀控制位于系统控制的最底层,根据换流器控制系统下发的调制波指令(或桥臂参考电压),完成各桥臂子模块投切控制,最终生成满足系统要求的桥臂阶梯波电压,此为模块化多电平换流阀控制的机理。然而阀控设备数字控制的特点以及模块化多电平换流阀调制方式,不可避免地引入换流阀控制的2种偏差:一是换流阀控制延时,一般至少为1个阀控周期;二是桥臂阶梯波电压与桥臂参考电压之间的幅值偏差,这是由模块化多电平最近电平控制方式和数字实现方法共同决定的。
首先,桥臂阶梯波电压的电平数对换流器输出交流电压总谐波畸变率(THD)具有决定性的影响,而当桥臂参考电压和桥臂子模块数一定时,阀控周期直接决定了桥臂输出电平数,示意图如图4所示,可见桥臂输出电平数可作为阀控周期设计的关键指标之一。
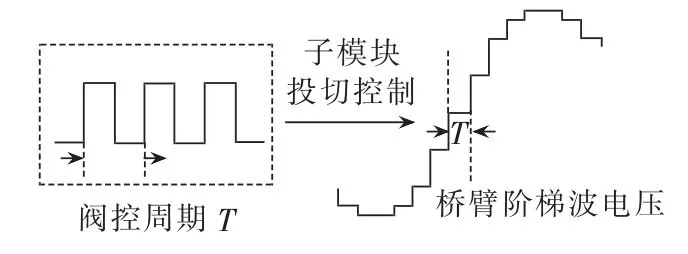
图4 阀控周期对桥臂输出电平数影响示意图Fig.4 Influence of valve control period on level number
根据MMC控制机理,同一相单元的上、下桥臂子模块投入数在同一时刻为互补关系,这在理论上就使得任意时刻同一相单元的投入子模块数为定值,从而保证了直流电压的恒定。然而由于阀控设备的延时,会使得同一相单元的上、下桥臂投入子模块数不完全互补,同一桥臂的子模块的上、下IGBT驱动脉冲也不完全对称,从而使同一时刻至少有1个或以上子模块延时(或提前)投入,最终导致直流电压的波动。值得注意的是,该直流电压的波动是阀控周期级和子模块开关级的波动,无法通过直流控制系统的闭环控制加以消除。阀控周期对直流电压波动的影响示意图如图5所示。可见,直流电压波动要求可作为阀控周期设计的关键指标之一。

图5 阀控周期对直流电压波动影响示意图Fig.5 Influence of valve control period on DC voltage fluctuation
此外,换流阀充电完成后的解锁瞬间,阀控设备接收到初始调制波,本质上为开环调制波,一般为解锁瞬间的阀侧交流电压。由于阀控设备本身的延时和最近电平控制的离散性必然导致实际输出的桥臂电压与初始调制波之间存在阀控延时与换流器控制延时共同产生的相位延时,以及子模块数投切数四舍五入导致的幅值偏差,产生桥臂电抗上的初始冲击电流,如图6所示。当系统参数与换流器控制周期一定时,桥臂输出电压的相位延时与幅值偏差均与阀控周期相关,因此表征换流阀启动性能的初始冲击电流大小可作为阀控周期设计的关键指标之一。

图6 换流阀初始冲击电流产生机理示意图Fig.6 Schematic diagram of initial surge current generation
综上所述,阀控周期优化设计指标可以选择为桥臂输出电平数、直流电压波动限制以及阀解锁初始冲击电流限制。
需要特别说明的是,本文是从换流阀层的角度研究阀控周期对换流阀控制性能的影响,与上层控制系统决定的控制模式无关。此外,事实上阀控周期不是影响设计指标的唯一因素,本文研究的前提是假定影响指标的其他因素(如系统参数、控制保护设备参数等)均已确定。
4 阀控周期与设计指标的数学关系分析与验证
下面分析阀控周期与桥臂输出电平数、直流电压波动、阀解锁初始冲击电流之间的数学关系,以作为阀控周期综合优化设计的理论依据,并通过仿真和试验验证理论分析的正确性。
4.1 阀控周期与电平数关系
对于MMC柔性直流换流器,当桥臂子模块数一定时,已有文献研究了2个临界控制周期与电平数的数学关系[5],本节为了得到全周期范围内的阀控周期与电平数的定量关系,对处于2个临界周期间的阀控周期与电平数的关系进行了数学分析,并通过仿真与试验验证理论分析的正确性。
4.1.1 理论分析
对于MMC柔性直流输电系统,设换流器系统频率为f0,阀控周期为T,桥臂子模块数为N,全电平输出时阀级最大控制周期为TM,稳态调制度为M,桥臂输出电平数为NL。
基于现有的研究结果[5]:



以A相为例,设A相上桥臂电抗器与阀子模块连接点对地电压为:

假设t时刻起,在1个阀控周期T的时间内,uA0变化1个子模块电压,则此时对应有:

在1/4周期内,正向过零点到uA0,则由2个子模块构成一个电平输出,电平数为:

在1/4周期内,从uA0到峰值点,则由1个子模块构成一个电平输出,电平数为:

由式(5)、(6)可得,此时桥臂输出电平数为:

同理,通过数学推演可得:

综上,阀控周期取值范围与桥臂输出电平数的数学关系可表示为:

需要说明的是,式(9)计算结果取整后若为奇数,则维持计算结果不变;计算结果取整后若为偶数,则在计算结果的基础上加1。
4.1.2 仿真与试验验证
为了有效验证阀控周期与电平数关系理论分析的正确性,基于MATLAB/Simulink针对桥臂含24个子模块的情况进行仿真分析。
根据式(1),桥臂子模块数为24时对应的TM=266 μs;仿真中阀控周期分别取 TM、2TM、4TM,桥臂阶梯波电压仿真波形和仿真数据分析分别见图7、8。

图7 T与电平数关系仿真Fig.7 Simulation of relationship between T and level number
从图7和图8可看出,仿真结果与计算结果基本一致。当T≤TM或 T≥时,仿真值与计算值几乎无偏差;当时,计算值较仿真值偏低,主要是由取整运算和1个阀控周期的时延带来的计算偏差,可通过函数修正进行解决。

图8 T与电平数关系仿真数据分析Fig.8 Analysis of simulative data of relationship between T and level number
为进一步验证理论分析的正确性,基于厂内MMC试验平台进行试验验证,桥臂子模块数为24,分别设定阀控周期为T=250 μs和T=500 μs。由于本文关于阀控周期对换流阀控制性能影响研究与控制模式无关,以系统STATCOM运行模式为例(后不赘述),试验结果如图9所示。当阀控周期T=250 μs时,小于对应的满电平输出的最大控制周期TM=266 μs,桥臂电压电平数为25;当阀控周期T=500 μs时,桥臂输出电平数为17,与仿真分析结果是一致的。

图9 T与电平数关系试验Fig.9 Experiment of relationship between T and level number
4.1.3 指标对阀控周期的制约关系
系统对桥臂输出电平数的要求主要取决于换流器输出交流电压THD。表1为换流器输出阶梯波相电压(暂不考虑滤波,按照调制度为1计算)电平数与THD的数据对应关系。

表1 电平数与THD关系曲线Table 1 Relationship between level number and THD
系统对阀侧交流电压THD的要求一般为THD<1.5%,根据表1所示的电平数与THD的关系可以看出,当电平数高于60时,换流器输出交流相电压阶梯波电压THD已降至1.3%,若考虑桥臂电抗器的滤波作用,阀侧交流线电压THD将低于1.3%,满足系统要求。因此,在满足系统要求的前提下,可将桥臂输出电平数临界值选为61,当桥臂子模块数确定时,可根据式(9)确定阀控周期的取值范围。
4.2 阀控周期对直流电压波动的影响
4.2.1 理论分析
阀控周期对换流器直流电压波动的影响,主要考虑由于阀控设备1个阀控周期的延时所造成的直流电压出现1个电平的电压跳变,对应的最大电压跳变量为:

其中,kμ为修正系数,考虑到桥臂电抗与子模块电压波动的影响,kμ一般取0.5。
4.2.2 仿真与试验验证
为有效验证理论分析的正确性,基于单站MMCMATLAB/Simulink仿真平台进行仿真验证,桥臂子模块电压为24,桥臂子模块平均电压为100 V,额定直流电压为2400 V,分别取阀控周期T=500 μs和T=1000 μs,仿真结果如图10所示。
从图10可以看出,仿真结果与理论分析基本一致,当阀控周期T=500μs≈2TM时,直流母线电压出现的最大电平跳变电压为80 V,接近1个子模块的平均电压;当阀控周期为T=1000 μs≈4TM时,直流母线电压出现的最大电平跳变电压为190 V,约为2个子模块的平均电压。由于理论计算中子模块电压为子模块的平均电压,而仿真中的电平跳变为为实际子模块电压的瞬时值,造成仿真结果与理论分析稍有偏差。
为进一步验证理论分析的正确,基于厂内MMC试验平台进行试验验证,桥臂子模块数为24,分别设定阀控周期为T=250 μs和T=500 μs,试验结果如图11所示(图中iA1、iA2分别为A相上、下桥臂电流)。
从试验结果可以看出,当阀控周期为250 μs时,直流电压最大波动幅值约为45 V,考虑子模块波动的影响,为子模块额定电压的一半;当阀控周期为500 μs时,直流电压波动约为100V,为1个子模块电压值,可见试验结果与理论分析基本一致。
4.2.3 指标对阀控周期的制约关系
假设系统要求的直流电压波动率为±ε,则有:


图10 阀控周期与直流电压波动关系仿真Fig.10 Simulation of relationship between T and DC voltage fluctuation

图11 T与直流电压波动关系试验Fig.11 Experiment of relationship between T and DC voltage fluctuation
由式(10)和式(11)可得:

可见,当桥臂子模块数和系统允许的直流电压波动范围确定时,根据式(12)可确定阀控周期满足该指标时对应的取值范围。
4.3 阀控周期对解锁瞬间的电流冲击影响
4.3.1 理论分析
设换流器级控制周期为Tc,阀控周期为T,桥臂子模块数为N,子模块平均电压为Usm,桥臂电抗为L。忽略换流器锁相误差的影响。对初始调制度M0计算时,则不可避免地引入一个周期Tc的相位延迟。
以A相为例,不妨设阀侧交流相电压为:

桥臂电抗器与阀接口处交流相电压为:

其中,ΔU为换流器多电平离散化输出造成的调制度幅值计算偏差,式(10)可表示ΔU最大值ΔUmax与桥臂控制周期T的关系。
A相电流iA可表示为:


可见初始调制度造成的最大冲击电流,主要和阀侧交流相电压峰值、换流器级控制周期、阀控周期、子模块电压以及桥臂电抗值有关,当阀侧交流电压、换流器级控制周期、子模块电压及桥臂电抗值及冲击电流限值一定时,便可以根据式(16)确定阀控周期的取值范围。
4.3.2 仿真与试验验证
为有效验证理论分析的正确性,基于单站MMCMATLAB/Simulink仿真平台进行仿真验证,桥臂子模块电压为24,桥臂子模块平均电压为110 V,阀侧交流相电压峰值1200 V,换流器级控制周期Tc=250 μs,桥臂电抗L=20mH,分别取阀控周期T=250μs和T=500 μs,换流阀预充电完成后在0.22s时解锁,仿真结果如图12所示。
将系统仿真参数代入式(16),阀控周期T=250μs对应的理论推算最大电流冲击为8.35 A,T=500μs对应的理论推算最大电流冲击为12.5 A。而图12所示的仿真结果为:T=250 μs对应的阀解锁初始冲击电流约为6 A,T=500 μs对应的阀解锁初始冲击电流约为9.5 A,其值均略低于理论推算值,这是因为初始调制度计算时并不一定对应的最大电平电压的跳变(最大电平电压的跳变发生在交流电压过零点附近)。
为进一步验证理论分析的正确,基于厂内MMC试验平台进行试验验证,系统试验参数与仿真参数一致,分别设定阀控周期为 T=250 μs和 T=500 μs,试验结果如图13所示。
试验结果表明,T=250μs时,阀解锁瞬间初始冲击电流峰值约为5 A;T=500 μs时,阀解锁瞬间初始冲击电流峰值约为8 A。上述结果与理论分析基本一致,进一步验证了理论分析的正确性。

图12 换流阀解锁瞬间电流冲击与T关系仿真Fig.12 Simulation of relationship between T and initial surge current during valve unlocking

图13 换流阀解锁瞬间电流冲击与T关系试验Fig.13 Experiment of relationship between T and initial surge current during valve unlocking
4.3.3 指标对阀控周期的制约关系
当系统的阀侧交流电压、换流器级控制周期、子模块电压值以及桥臂电抗值确定时,可根据系统允许的初始冲击电流的大小为 Ien,由式(10)和式(16)确定阀控周期的取值范围。

4.4 阀控周期的最优选取
基于以上分析,假设满足换流阀输出电平数要求的最大阀控周期为T1,满足直流电压波动要求的最大阀控周期为T2,满足换流阀解锁瞬间电流冲击限制要求的最大阀控周期为T3,阀控周期的最优设计值为 Topt,则有:

根据式(18)即可选择最优的阀控周期。
5 工程应用算例
本文以±320 kV/1000 MW柔性直流输电工程为例,进一步阐述阀控周期选取原则的理论应用。系统主要参数如下:额定直流电压±320 kV,额定功率1000 MW,阀侧交流电压330 kV,阀侧额定交流峰值2470 A,桥臂子模块数为N(N可取值为400、300、200、100),桥臂子模块平均电压为 Usm(其数值由桥臂子模块数而定),桥臂电抗80 mH,换流器级控制周期Tc=125 μs。该工程针对本文所述的3个换流阀控制性能指标分别为:
①换流阀侧交流电压THD<1.5%;
②直流电压波动小于额定直流电压的±3%;
③阀解锁初始冲击电流小于阀侧额定交流电流峰值的50%。
5.1 根据控制性能指标确定最优阀控周期
不妨假定N=400,则对应Usm=1600 V。
针对指标①,首先根据式(1)(2)计算桥臂子模块 N=400 时,401 电平输出对应的 T≤TM=16.9 μs,当阀控周期与电平数成线性关系时对应T≥225 μs,对应的电平数为45,不满足阀侧交流电压THD的要求,当取 5TM<T=100 μs<6TM,根据式(9)可以求得输出电平数为81>61,满足系统要求且有30%的裕量,100 μs的换流阀控制周期已对控制硬件没有压力,因此综合考虑到系统可靠性、安全裕量等因素,当N=400时单从满足换流器输出电平数考虑,可选择阀控周期 T=100 μs;
针对指标②,已知 TM=16.9 μs,N=400,ε=3%,根据式(12)可得 T<406 μs;
针对指标 ③,已知 TM=16.9μs,N=400,Usm=1600 V,L=80 mH,Um=270 kV,Ien=1235 A,根据式(17)可得 T<113 μs。
综上,根据式(18),当N=400时,阀控周期可取T=100 μs。
5.2 根据电平数确定最优阀控周期
若该工程要求换流阀输出电平数为101时,以下分别针对N为400、300、200、100进行阀控周期的优化设计。
换流阀输出电平数为101时,已满足指标①,当桥臂子模块数一定时,只要先根据式(9)计算该电平数对应的换流阀控制周期,再核对该阀控周期是否满足指标②和③即可。
若 N=400,根据式(1)、(2)和(9)可得,换流阀要输出101电平,阀控周期必然满足4TM<T<5TM,再由式(9)可得 T=81.9 μs,根据式(12)和(17)核算,完全满足指标②和指标③的要求。
同理可针对桥臂子模块数N分别为300、200、100时对应的最优阀控周期T,计算结果如表2所示。

表2 101电平条件下不同桥臂子模块数对应的阀控周期TTable 2 Relationship between T and quantity of submodule,in condition of 101 levels
6 结语
随着柔性直流技术的快速发展,换流阀控制设备应用于大规模多节点模块化多电平柔性直流输电系统将面临重大挑战,本文提出通过优化设计换流阀控制周期以降低阀控设备的软硬件设计复杂度。基于MMC的工作原理、控制架构和调制方式,分别从桥臂输出电平数、直流电压波动、阀解锁初始冲击电流3个关键指标阐述换流阀控制周期的优化设计方法,并给出了工程应用算例。理论分析、仿真与试验结果表明,本文所述的换流阀控制周期的优化设计方法,可应用于大规模多节点模块化多电平柔性直流输电换流阀控制设备的优化设计,具有较高的工程应用价值。
猜你喜欢
电子制作(2019年11期)2019-07-04
中国实用神经疾病杂志(2018年9期)2018-05-25
电测与仪表(2016年22期)2016-04-12
通信电源技术(2016年5期)2016-03-22
中国学术期刊文摘(2016年2期)2016-02-13
电气传动(2015年4期)2015-07-11
电子工业专用设备(2015年4期)2015-05-26
电测与仪表(2015年2期)2015-04-09
电源学报(2015年6期)2015-02-18
中国医药导报(2015年20期)2015-01-11