随钻声波井下时差实时提取算法研究与应用
2015-10-09 11:30师奕兵刘西恩康师源
电子科技大学学报 2015年4期
张 伟,师奕兵,刘西恩,仇 傲,康师源
(1. 电子科技大学自动化工程学院 成都 611731;2. 中海油田服务股份有限公司油田技术事业部 北京 通州区 101149)
·自动化技术·
随钻声波井下时差实时提取算法研究与应用
张 伟1,师奕兵1,刘西恩2,仇 傲2,康师源1
(1. 电子科技大学自动化工程学院 成都 611731;2. 中海油田服务股份有限公司油田技术事业部 北京 通州区 101149)
随钻声波测井仪能够伴随钻井作业,在泥浆侵入地层之前或侵入很浅时采集声波测井数据。然而目前在用的泥浆脉冲传输方式传输速率极低,井下仪器和地面系统之间只能进行简单的通信交互,大量声波测井数据无法实时上传到地面系统,从而导致地面人员不能实时监测地质状况。针对这一问题,该文将时差提取算法集成到井下电路系统中,在井下实现从声波测井数据中实时提取反映地层状况的时差信息,并将此时差处理结果实时上传到地面系统,地面作业人员则能够通过时差信息来实时了解地层状况,从而指导钻井作业。实验结果表明,该算法能够在井下电路中高效运行,且计算速度快、实时处理性能优异、时差提取精度高,完全满足随钻声波测井仪实际工作的需求。
随钻声波测井仪; 井下电路系统; 泥浆脉冲传输; 实时处理; 时差提取算法
时差是声波测井数据中包含的重要地层信息,是反应地层特性的关键参数,由于声波在不同特性的地层中传播速度不同,相应的时差也会不同。这一特性使得时差在划分地层、判断气层以及估算地层孔隙度等方面有着重要的作用[1-3]。
传统的电缆测井方法是在地面利用高性能计算机从大量实时传送的声波测井数据中计算时差参数。然而采用的随钻声波泥浆脉冲传输系统数据传输率一般在3~5 bit/s[4-5],只能完成命令收发等简单交互通信,无法满足大量随钻声波测井数据的实时上传,从而导致地面人员不能实时获取地层信息。
针对这一问题,本文首先给出一种高效的井下时差提取算法,该算法对接收到的声波信号进行时域相关处理,能够同时准确提取地层纵波、横波以及斯通利波的时差,克服了传统振幅比值法,短长窗能量比法等由于仅仅依靠首波到时检测来提取时差,容易受噪声尖峰干扰而出现偏差的缺点。然后将该时差提取算法集成到随钻声波测井仪井下电路系统中,在井下实现从大量测井数据中实时提取时差信息并上传到地面系统,从而使地面作业人员能够实时跟踪地层信息状况,指导钻井作业。
1 井下时差提取算法原理
1.1 算法概述
随钻声波测井仪井下发射换能器在高压脉冲的激励下产生特定频率的声波信号,使其按照特定角度入射到待测地层,从而激励出地层波,该地层波在地层中传播一定时间再次经过折射由接收换能器接收[6-7],其基本原理如图1所示。其中,地层波到达两个接收换能器所用时间的差值即为时差。
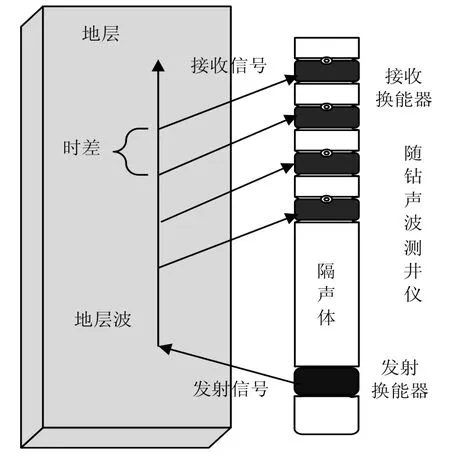
图1 随钻声波测井仪测井原理
由于声波在不同特性的地层中传播速度不同,相应的时差也会不同。如在砂泥岩性的地层中泥岩的时差较大而砂岩的时差较小,气层的时差比含油含水地层的时差大得多,孔隙性和裂缝性的石灰岩时差比致密石灰岩的时差要大。因而时差是反应地层特性的关键参数。然而在随钻声波实际测井过程中,利用现有的泥浆脉冲传输技术不可能把采集到的大量声波测井数据实时传输给地面系统。针对这一问题,在井下电路系统中设计时差提取功能,只将数据量极小的时差处理结果上传到地面系统是比较可行的办法。
本文采用慢度−时间相关法(slowness-time coherence,STC)进行时差计算。所谓慢度就是时差与接收换能器间距的商值,时差和仪器本身的结构有关系,而慢度值在反映客观地层信息时显得更加直观[8]。STC算法的基本原理如下:在一组声波信号的不同位置加设时间窗,时间窗加设位置的选择由第一个接收换能器的声波到时和慢度值决定。这里的声波到时和慢度值均为可能值,即假定声波到时和慢度值可能出现的取值范围中的一组值。对于所有可能的声波到时和慢度值,算法通过相关函数对时间窗内的声波信号的相似程度进行计算分析,计算结果为相关系数,数值在0~1之间,越接近1说明该时窗内声波信号越相似,此时的声波到时和慢度值就越接近实际情况。
1.2 相关函数分析
相关函数计算公式为:

式中,ρ(τ,s)为相关系数,其数值大小反映相似程度;N为接收装置数量;fn(t)为第n个接收换能器接收到的声波数据,1≤n≤N;zn为第n个接收换能器到发射换能器的距离,当n为1时z1为源距(发射换能器与第1个接收换能器之间的距离);TW为选用的时间窗宽度[9]。通过相关函数可以判断声波信号中到时为τ和慢度为s的成分波是否存在。相关系数的值在0~1之间,只有在N道声波信号完全一致的情况下相关系数才会等于1,如果假定的慢度和声波到时与实际声波的慢度和到时不一致,相关系数则会是一个较小的值。对于声波信号中的不同成分波,在各自对应的声波到时和时差区域内都会有一个相关系数的局部极大值。相关函数分析的具体计算过程如图2所示。
从图2可以看出,相关函数计算步骤如下:
1) 在第1道波形的当前起始时间τ_min处加设时间窗,时间窗宽度为TW,第2~第4道波形加窗位置依次后移s_min∗(zn−z1),其中s_min为处理起始慢度,zn−z1为第n个接收换能器和第1个接收换能器的间距,两者的乘积即为当前的时差值,然后通过公式计算出此时4道波形的相关系数;
2) 第1道波形的时窗位置不变,后3道波形的加窗位置再次后移s_step∗(zn−z1),s_step为慢度步长,计算出此时的相关系数并令s=s+s_step,然后重复本步骤直到s的值等于处理终止慢度s_max,重复次数为:

3) 将第1道波形加窗位置后移τ_step,τ_step为时间窗步长,重复步骤1)和步骤2),完成后令然后重复本步骤直到τ值等于处理终止时间τ_max,重复次数为:


图2 相关函数计算过程

图3 某型声波测井仪测井数据处理结果
以声波到时和慢度为变量的相关函数是后续处理的基础,通过相关函数能得到所有可能的到时和慢度取值范围内的一条声波测井数据的信息,这些信息一般通过一个以声波到时和慢度为坐标的等值图表现,各成分波的慢度值和到达时间就是等值图中峰值点所对应的横纵坐标。图3所示即为某型声波测井仪器在3 000 m裸眼井段测得波形数据处理后的等值图,从图中能轻易地分析出纵波、横波以及斯通利波的到时和慢度信息。除等值图外也常用色彩深度图来生动显示处理结果。
1.3 寻峰方法分析
在实际测井过程中会产生成千上万条测井数据,对每一条数据都通过画等值图进行分析是不切实际的[10]。因此有必要对相关函数处理的结果数据量进行缩减,为此采用“寻峰”方法寻出相关函数的处理结果中的慢度峰值,即声波信号的实际慢度值,然后用慢度随测井深度变化的图像来描绘整个测井结果。寻峰,顾名思义就是寻找相关系数中的峰值,寻峰方法有两个特征:1) 寻峰的范围为慢度−时间平面上一个预先设定的区域;2) 寻峰方法中对于“峰值”的定义与众不同。
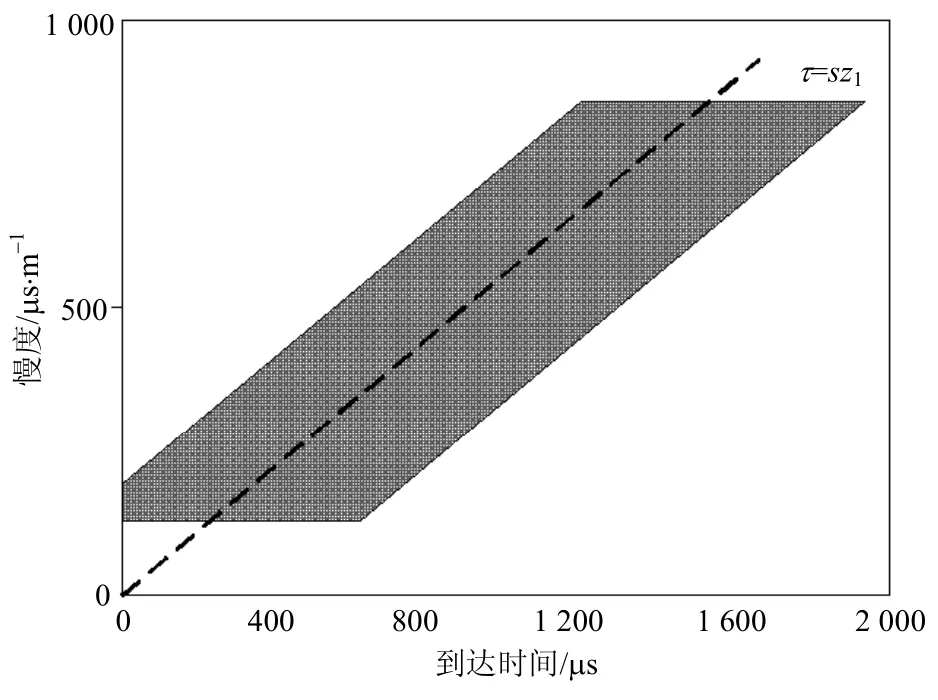
图4 慢度−时间平面上的寻峰范围
如图4所示,寻峰的范围为慢度−时间平面上的一个平行四边形。与此对应,相关函数也只对该区域中的数据进行处理。通常情况下,寻峰范围对应的慢度值定为100~800 μs/m,声波到时的范围下限一般从0开始,上限为:

理论上,假如某地层的纵波时差为s,源距为z1,那么纵波应为两者之积。然而,只有在地层均匀的情况下地层时差值才是一个定值,也只有此时式(1)成立。因此由式(2)在慢度−时间平面上确定的某条直线周围才有可能存在真实声波到时,这片区域也是寻峰的搜索范围。在随钻声波测井数据的时差提取过程中,寻峰的搜索范围不确定,对于地层纵波,到时的搜索范围上限一般设置在1 800~2 000 μs之间。
寻峰方法的关键在于定义何为“峰值”。最简单也最显而易见的标准就是在慢度−时间上的寻峰范围内存在一点(τ ,s),相关系数在该点达到最大值,该点的纵坐标值s即所求峰值。然而,这种定义并不完善,因为声波信号中包含纵波、横波以及斯通利波等多种成分波,该定义显然只能找到其中一种成分波的峰值,所以针对各种成分波,需要分别处理。
实际处理时,峰值点必须满足两个条件:1) 相关函数在该点的值超过了设定的阈值;2) 相关函数在该点的值超过了以该点为中心的矩形区域内所有其他点的值。
1.4 算法流程
井下时差提取算法的执行流程如图5所示,首先根据实际井况设置波形参数和处理参数;再加载采集到的携带地层信息的测井数据;然后根据滤波、控制参数等设置,对采集数据进行滤波处理,从而计算出井下时差,并存储计算结果。

图5 井下时差提取算法实现流程
井下时差提取算法中涉及两类参数:一类为与测井波形数据有关的波形参数,这类参数是基本不会改变的恒定值,在时差提取过程中不可更改;另一类为处理参数,这类参数与后续的数字滤波、时差提取操作紧密相关,参数变化对算法结果影响较大,需要根据不同地层情况进行设置。
波形参数包括:波形道数、每道波形点数、采样时间间隔、源距以及接收器间距。波形道数、源距以及接收器间距与仪器的结构设计有关,在仪器设计成型后就已经确定,而每道波形点数和采样时间间隔一般也不会修改,因此波形参数是基本恒定的参数。
处理参数较之波形参数包含更多的内容,主要涉及以下4个方面:
1) 处理时窗设置,包括处理起始时间、处理终止时间、处理时窗长度以及处理时窗步长;2) 处理慢度(时差的倒数)设置,包括处理起始慢度、处理终止慢度以及处理慢度步长;3) 滤波参数设置,包括截止频率、滤波器阶数以及滤波窗选择;4) 地层参数设置,包括地层提取模式和地层类型。
时窗和慢度的设置主要用来确定时窗的加设位置以及时窗的移动方式,为后续的波形相关处理和寻峰处理预先设定一个范围。本文算法采用FIR滤波器进行滤波处理,根据参数可以选择截止频率、滤波阶数以及窗函数。地层提取模式和地层类型确定本次提取的模式波为纵波、横波、斯通利波,是快地层还是慢地层。处理参数设置完成后,需要对各个参数进行合理性控制,控制的目的是保证上述所有参数处于合理范围,对于处理起始时间/处理终止时间和处理起始慢度/处理终止慢度两对参数,还需保证起始值小于终止值。
在预设置好各种参数后,接下来进行最为核心的时差提取操作,其基本原理描述如下。首先在一组声波信号的不同位置加设时间窗,时间窗加设位置的选择由两个参数决定:第一个接收换能器的声波到时以及慢度值。这里的声波到时和慢度值均为一个可能出现的估计值,即假定声波到时和慢度值可能出现的取值范围中的一组值。对于所有可能的声波到时和慢度值,算法通过相关函数对时间窗内的声波信号的相似程度进行计算分析,计算结果为声波信号的相关系数,其取值范围在0~1之间,结果越接近1说明该时间窗内声波信号越相似,此时的声波到时和慢度值就越接近实际情况[11]。通过相关函数分析,每次计算得到的为单点时差处理结果,这时只要进一步将该次测井过程的所有单点时差结果进行寻峰处理,就能够获得本次测井的井段时差。
2 时差提取算法在井下电路系统的实现
时差算法需要集成到井下电路系统,以达到时差信息实时提取的目的。本文设计的井下电路系统实物如图6所示[12]。
井下电路系统的核心处理芯片选用TI公司的一款高性能32位浮点型处理器TMS320F28335,它集成了符合IEEE-754标准的单精度浮点运算单元,拥有改进的哈佛总线结构。该芯片拥有34k×16 bit的RAM空间,片上自带256k×16 bit的FLASH空间,并带有一个16 bit和32 bit可选的可扩展接口,寻址范围达2 M以上。
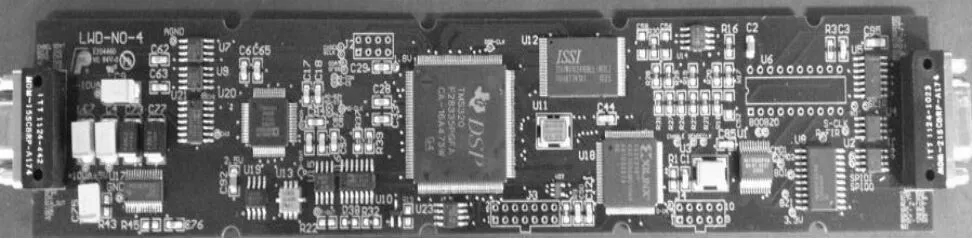
图6 随钻声波测井仪井下电路实物图
在DSP处理器中的实现时差提取算法,主要面临两个问题:1) 算法执行过程中会产生大量的中间变量,需要较大的内存空间;2) 算法计算量大,计算过程较为繁复,而井下仪器留给算法的处理时间并不多,时差提取算法运算时间限制在300 ms以内,因此需要提高算法执行效率,缩减算法处理时间。
2.1 内存环境设计
声波时差提取算法执行过程中,会产生大量的中间变量以及计算参数,需要占据大块的内存空间,但是井下系统处理器片上内存空间十分有限,为了解决内存不足的问题,在硬件设计时利用Xintf (External Interface)接口,为系统处理器添加了1 Mb的外扩RAM。Xintf采用异步数据传输方式,由20根地址线、32根数据线和3根片选信号线组成。片选信号线对应3个外扩区域Zone0、Zone6、Zone7。本文设计中使用的外扩区域为Zone7,地址范围从0x20 000~0x30 000。外扩RAM选用的是ISSI公司的存储芯片IS64WV102416BLL,其片选信号由F28335的片选信号XZCS7产生,20位的地址线和16位的数据线分别连到F28335的地址总线和数据总线,读写使能信号由F28335的读写使能端产生。
在内存空间的硬件环境搭建后,首先通过编辑CMD文件实现存储空间的声明和分配,再通过TI公司提供的专用函数DATA_SECTION实现数据搬移工作,实现方式如下:
#pragma
DATA_SECTION(Variable,”Data_Section”);
其中,“pragma”为预处理指令;“Variable”为需要重新定位地址的变量;“Data_Section”为指定的段,该段需在CMD文件中有定义。
2.2 时差提取算法的执行效率优化
在DSP处理器的不同内存单元中,代码的执行速度各不相同,数据和程序的读写都有不同的等待周期,这些等待周期的长短决定了该区域内代码的执行效率。CPU访问RAM中数据时,读写速度较快,而访问FLASH数据时,则读写速度相对较慢。在随钻声波测井仪井下电路系统的设计中,程序固化在片上FLASH中,以便掉电后,程序不会丢失。为提高算法执行效率,选择上电后,将提取算法中的几个计算量比较大,访问频繁的关键函数搬移到片上RAM中运行,以提高代码的执行速度[13]。
假如算法代码位于FLASHA中,要将其搬移到RAML1中,则需要在CMD文件的内存分配部分添加如下语句:
Ramfuncs: LOAD=FLASHA,
RUN=RAML1,
AD_START(_RamfuncsLoadStart),
LOAD_END(RamfuncsLoadEnd),
RUN_START(RamfuncsRunStart),
Page0
在SECTION中定义了一个段,名为Ramfuncs,该段特定用来存储需要搬移到RAM内运行的程序,在该段内的代码装载在FLASHA中,首地址为RamfuncsLoadStart,末地址为RamfuncsLoadEnd,搬移后代码在RAML1中运行,运行的首地址为RamfuncsRunStart。在DSP处理器实际运行时,不会自动将FLASHA中代码搬移到RAML1中运行,需要使用MemCopy函数完成搬移操作,该函数原型为MemCopy(&RamfuncsLoadStart,&RamfuncsLoadEnd, &RamfuncsRunStart)。
通过执行上述函数,FLASHA中地址从RamfuncsLoadStart到RamfuncsLoadEnd的代码被搬移到了RAML1中起始地址为RamfuncsRunStart的空间中运行。通过实际测试对比,算法在FLASH中运行时间约为380 ms,搬移到RAM中运行时间则为230 ms,运行时间缩减了约39.5%,满足系统要求。
3 实例与分析
随钻声波测井仪在中海油服新疆库尔勒基地KY-12井进行实际测井实验,图7为Drilling模式下单点的地层纵波和横波的时差提取结果,包括滤波后的波列图、频谱图、时间慢度图和相关系数图(其中,频谱图的横坐标做了归一化处理)。
图8为深度从1 600~1 850 m井段Drilling模式的处理结果。其中,第1道为深度道;第2道为原始波形曲线;第3道为主频在10~15 kHz滤波后全波列曲线;第4、5道为纵波和横波相关系数投影灰度图;第6道为主频在2~6 kHz滤波后全波列曲线;第7道为斯通利波相关系数投影灰度图;第8道为纵波、横波和斯通利波慢度曲线。

图7 Drilling模式下纵波、横波时差提取结果

图8 Drilling模式测井数据处理结果
在每次下井测试前,首先根据当前油气井地层的大致情况设定时差提取范围,并且需要针对每一种成分波分别设定,科学设置波形参数和处理参数是精确提取时差信息的第一步。由于新疆KY-12井地层为软地层,时差值较硬地层更大,故纵波时差范围设定为50~153 μs/ft,横波时差范围设定为80~183 μs/ft,斯通利波时差范围设定为150~301 μs/ft。与此同时,由于时差提取算法运行过程中,处理参数的选择对时差提取结果影响很大,因此根据不同测井地层的具体特性需要对处理时窗、慢度时窗、滤波参数等进行合理设定,这都依赖于现场测井操作工程师的经验和现场判断。
本文时间提取算法的实现平台为TI公司的32位浮点型处理器TMS320F28335,其数据处理精确能够达到小数点后6位,那么即使声波时差提取算法中涉及大量的乘法、除法、平方、开方等复杂运算,DSP处理器带来的计算误差也会严格控制在很小的范围内,这就为提高声波时差提取精度提供了很好的硬件运算处理平台。从实际处理结果看,3种模式波的慢度值曲线较为清晰,慢度值变化不大,说明测量范围内的整个地层特性变化不大,也证明了时差提取算法在井下电路中运行良好,能很好地完成时差提取工作。通过进一步分析计算,可以得到纵波时差平均绝对误差为2.16 μs/ft,平均相对误差为1.82%;横波时差平均绝对误差为7.78 μs/ft,平均相对误差为3.68%;斯通利波时差平均绝对误差为12.84 μs/ft,平均相对误差为5.98%。无论对于哪种模式波,该方法计算的声波时差与传统地面软件计算的声波时差平均相对误差都控制在5%以内,满足现场解释精度要求。更为重要的是,该算法能够在井下仪器中高效运行,实时提取的声波时差值可以实时上传到地面系统,地面系统随即绘制出随深度变化的慢度值曲线,供地面作业人员实时跟踪地层信息状况,指导井下钻井作业。实际作业情况表明,该算法时差提取精度高、计算速度快、实时性能优异,完全满足随钻声波测井仪实际工作的需求。
4 结 论
本文针对实际随钻测井作业的需要,提出了一种随钻声波井下时差实时提取算法,该算法通过相关函数计算提取出单点测井数据中各成分波的时差信息,利用寻峰处理得到作业井段时差信息。然后通过内存设计、优化关键函数执行效率,确保了算法在井下电路系统中实时高效的运行。实际测井结果表明,该算法能正确提取声波测井数据中的地层时差信息,实时上传时差处理数据,从而使得地面作业人员能够实时监测仪器工作状态,及时跟踪地层变化状况,科学指导井下钻井作业。
[1] 张伟. 阵列声波测井仪研制及测井数据处理方法研究[D].成都: 电子科技大学, 2010. ZHANG Wei. Study on array acoustic logging tool and its data processing method[D]. Chengdu: University of Electronic Science and Technology of China, 2010.
[2] 刘玉梅, 杨桂茹, 武国华. 利用声波时差测井信息定性判断断层封闭性[J]. 大庆石油学院学报, 2009, 33(2): 6-10. LIU Yu-mei, YANG Gui-ru, WU Guo-hua. Qualitative judgment of fault sealing by using acoustic logging information[J]. Journal of Daqing Petroleum Institute, 2009, 33(2): 6-10.
[3] 王亚东. 如何用测井声波时差曲线计算地层压力[J]. 录井工程, 2005, 16(4): 59-61. WANG Ya-dong. How to use well logging interval transit time curve to compute formation pressure[J]. Mud Logging Engineering, 2005, 16(4): 59-61.
[4] 牛林林. 随钻测井的数据传输[J]. 国外测井技术, 2009(6): 7-9. NIU Lin-lin. Logging-while-drilling data transmission[J]. World Well Logging Technology, 2009(6): 7-9.
[5] 刘修善, 苏义脑. 泥浆脉冲信号的传输速度研究[J]. 石油钻探技术, 2000, 28(5): 24-26. LIU Xiu-shan, SU Yi-nao. Study on transmission velocity of mud pulse signal[J]. Drilling&Production Techniques, 2000, 28(5): 24-26.
[6] 刘树坤, 汪勤学, 梁占良, 等. 国内外随钻测量技术简介及发展前景展望[J]. 录井工程, 2008, 19(4): 32-37, 41. LIU Shu-kun, WANG Qin-xue, LIANG Zhan-liang, et al. Introduction and development prospect of MWD technique at home and abroad[J]. Mud Logging Engineering, 2008, 19(4): 32-37, 41.
[7] 申本科, 赵红兵, 宋相辉, 等. 电缆测井、随钻测井和过套管测井研究[J]. 国外测井技术, 2011(1): 10-14. SHEN Ben-ke, ZHAO Hong-bing, SONG Xiang-hui, et al. Study of wireline logging, logging while drilling and through-casing logging[J]. World Well Logging Technology, 2011(1): 10-14.
[8] 李奇, 夏宏泉, 房国庆, 等. 阵列声波的纵横波时差提取方法研究[J]. 国外测井技术, 2010(2): 22-24. LI Qi, XIA Hong-quan, FANG Guo-qing, et al. P-wave and S-wave time difference extraction of array acoustic logging[J]. World Well Logging Technology, 2010(2): 22-24.
[9] 宋延杰, 何英伟, 石颖, 等. 慢度−时间相关法与遗传算法结合提取阵列声波时差[J]. 测井技术, 2006, 30(2): 122-125. SONG Yan-jie, HE Ying-wei, SHI Ying, et al. Estimating slowness of array sonic data with slowness time coherence and genetic algorithm[J]. Well Logging Technology, 2006, 30(2): 122-125.
[10] 黄文新. 声波信息时差相关处理[J]. 测井技术, 1987, 11(6): 48-51. HUNG Wen-xin. The semblance processing method of the sonic slowness[J]. Well Logging Technology, 1987, 11(6): 48-51.
[11] KIMBALL C V, MARZETTA T L. Semblance processing of bolehole acoustic array data[J] . Geophysics, 1984, 49(3): 274-281.
[12] 袁文涛. 随钻声波测井仪井下信号采集与处理系统设计[D]. 成都: 电子科技大学, 2013. YUAN Wen-tao. Design of downhole signal acquisition and processing system for acoustic logging-while-drilling tool[D]. Chengdu: University of Electronic Science and Technology of China, 2013.
[13] 饶知. 交叉偶极阵列声波测井井下电路关键技术研究与实现[D]. 成都: 电子科技大学, 2011. RAO Zhi. Research and implementation of key technologies of cross-dipole acoustic array logging downhole circuit system[D]. Chengdu: University of Electronic Science and Technology of China, 2011.
编辑漆 蓉
Research and Application of Down-Hole Time-Difference Extraction Algorithm for Acoustic Logging-While-Drilling
ZHANG Wei1, SHI Yi-bing1, LIU Xi-en2, QIU Ao2, and KANG SHI-yuan1
(1. School of Automation Engineering, University of Electronic Science and Technology of China Chengdu 611731; 2. Well Tech of China Oilfield Services Limited Tongzhou Beijing 101149)
Acoustic logging-while-drilling tool is capable of collecting of acoustic logging data while drilling work processes at the same time. Moreover, the logging data were acquired when the formation was not contaminated by mud. However, mud pulse transmission has an extremely low transmission rate and only simple interactive communications can be realized between surface and down-hole tool, a large amount of logging data cannot be uploaded to the surface, so that logging personnel is not able to monitor geological condition in real time. To solve this problem, this paper embeds a time-difference extraction algorithm into the down-hole circuit system, the time-difference data which reflects formation information can be extracted from acoustic logging data in the down-hole tool. So that the processing result can be real-time uploaded to the surface, thus logging personnel can analyze the formation condition through time-difference data and consequently guide the drilling work. It is shown by experiment that the algorithm can run efficiently in the down-hole circuit and demonstrate the excellent performance of high accuracy, which meets the practical working requirements of acoustic logging-while-drilling tool.
acoustic logging-while-drilling tool; downhole circuit system; mud pulse transmission; real-time processing; time-difference extraction algorithm
TP391.4
A doi:10.3969/j.issn.1001-0548.2015.04.014
2014 − 06 − 16;
2015 − 03 − 11
基本项目:国家自然科学基金(61201131);国家863项目重大专项(2011AA090101);“十二五”国家科技重大专项(2011ZX05020-005);中央高校基本科研业务费专项资金(ZYGX2012J092)
张伟(1979 − ),男,博士,副教授,主要从事声波测井技术、微弱信号检测、高精度信号采集与处理等方面的研究.
猜你喜欢
测井技术(2022年3期)2022-11-25
化工管理(2021年7期)2021-05-13
中国宝玉石(2018年3期)2018-07-09
小猕猴智力画刊(2017年6期)2017-07-03
化工管理(2017年29期)2017-03-03
西南石油大学学报(自然科学版)(2016年2期)2016-12-01
中国煤层气(2015年4期)2015-08-22
中国煤层气(2015年5期)2015-08-22
西南石油大学学报(自然科学版)(2015年4期)2015-08-20
中国质量与标准导报(2015年2期)2015-02-28