复合行星齿轮系动态特性仿真分析
2015-10-10 07:52李国彦李方义朱兆聚
中南大学学报(自然科学版) 2015年5期
李国彦,李方义,朱兆聚
复合行星齿轮系动态特性仿真分析
李国彦,李方义,朱兆聚
(山东大学机械工程学院,高效洁净机械制造教育部重点实验室,山东济南,250061)
为了研究复合行星齿轮系振动信号频谱特征,以SD16再制造变速箱复合行星齿轮系为研究对象,建立系统动力学模型。通过系统转速特性、啮合频率以及啮合力计算分析,给出理想啮合力曲线。利用ADAMS仿真平台,对复合齿轮系动力学模型进行验证,并对双排行星架太阳轮与行星轮啮合力在系统绝对坐标系中轴分量和轴分量的时域和频域特性进行仿真分析,为再制造变速箱现场故障诊断频谱分析提供参考依据。仿真结果表明:啮合齿轮副啮合力时域波形与理想啮合力曲线基本一致,具有明显的波动性与周期性。在频谱分析中,齿轮副啮合频率的1倍频与2倍频为主要频率,存在明显的幅值调制现象。
复合行星齿轮系;动力学仿真模型;啮合力分析
再制造的变速箱关键总成的服役条件、报废原因、几何结构、失效规律、损伤程度等复杂多样,目前许多研究者在再制造关键零部件表面状况以及损伤评价方面进行了大量的工作,但在整机故障诊断方面还处于起步阶段,基于振动测试技术研究面向再制造关键总成的故障诊断工艺是当前再制造产业发展的重要挑战。SD16变速箱在工程机械领域应用广泛,其后退档为复合两级行星齿轮系,是变速箱的主要传动部件,在许多研究中,通过振动信号边带频谱结构来确定齿轮缺陷类型及位置,但现场测试信号振动形态复杂,包含大量的背景噪声,弱故障信号很难被识别和提取。与定轴式齿轮机构相比,由于行星架的旋转,将会产生以啮合频率及其谐波为载波频率,行星架旋转频率及其谐波为调制频率的幅值调制[1−4],使得行星式齿轮机构振动信号呈现出更复杂的频谱特征,因此,通过动力学仿真技术研究行星齿轮系的运动特性以及频谱特征对于再制造变速箱故障诊断具有重要意义。目前,国内外许多研究者对行星齿轮系的动态特性进行了相关研究,并取得了一定的成就,但对复合多级行星齿轮系的研究并没有得到广泛关注。Kahraman[5]首次建立了复合行星齿轮系纯扭转动力学模型,并对其固有特性进行分析;Guo等[6−7]在修正前人模型的基础上建立了复合多级行星齿轮系纯扭转动力学模型,并研究了行星轮转动惯量和时变啮合刚度对系统固有特性的影响;杨富春等[8]建立了RAVIGNEAVX式行星齿轮系平移−扭转耦合动力学模型,并计入传递误差对系统固有特性的影响;巫世晶等[9]基于谐波响应法研究了RAVIGNEAVX式行星齿轮系非线性动态响应特性,并计入时变啮合刚度、齿侧间隙及传动误差对系统动态特性的影响。文献[5−9]主要针对复合行星齿轮系的固有特性、参数敏感性以及动态响应进行研究,但对其运动特性及振动频谱特征的研究很少,刘振皓等[10]建立了RAVIGNEAVX式行星齿轮系动力学仿真模型,并对其运动特性进行研究。在此,本文作者以SD16再制造变速箱复合行星齿轮系作为研究对象,建立复合行星齿轮系的动力学仿真模型,对系统转速特性、啮合频率以及理论啮合力进行计算分析,并对啮合力进行时域和频域特性仿真分析,以便为再制造变速箱现场故障诊断频谱分析提供参考依据。
1 复合行星齿轮系动力学仿真模型
1.1 复合行星齿轮系基本结构
复合行星齿轮系传动简图如图1所示。其中:S1和S2为太阳轮;P1,P2和P3为行星轮;R为齿圈;C为行星架;P2与太阳轮S2和行星轮P3啮合,P3与齿圈R和行星轮P2啮合。该系统由1个单排行星架和1个双排行星架复合而成,前后排行星齿轮共用1个内齿圈及行星架,输入轴直接与双排行星架太阳轮连接。
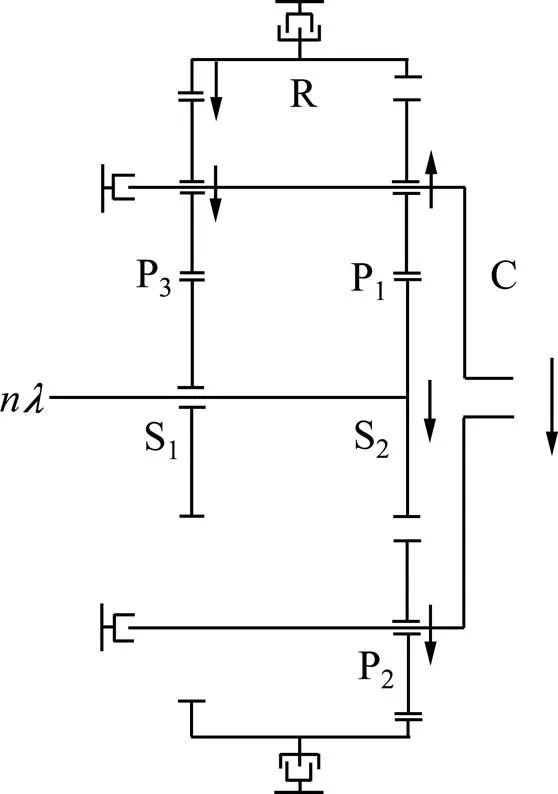
图1 复合行星齿轮系传动简图
复合行星齿轮系为标准直齿轮传动,模数=3.5,基本参数如表1所示。

表1 啮合齿轮副齿数
1.2 复合行星齿轮系动力学仿真模型的建立
由于复合齿轮系结构复杂,本文利用Pro/E和SolidWorks建立三维实体模型[10−12](见图2)。
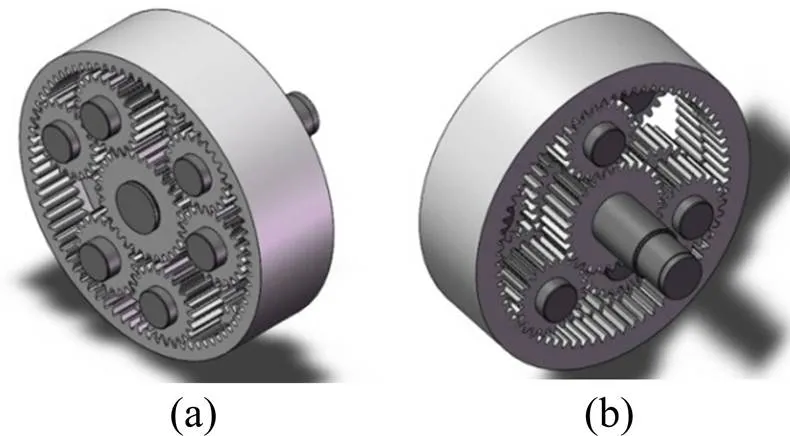
(a) 双排行星架;(b) 单排行星架
将实体模型导入ADAMS,设置材料属性,复合行星齿轮系材料参数如表2所示。
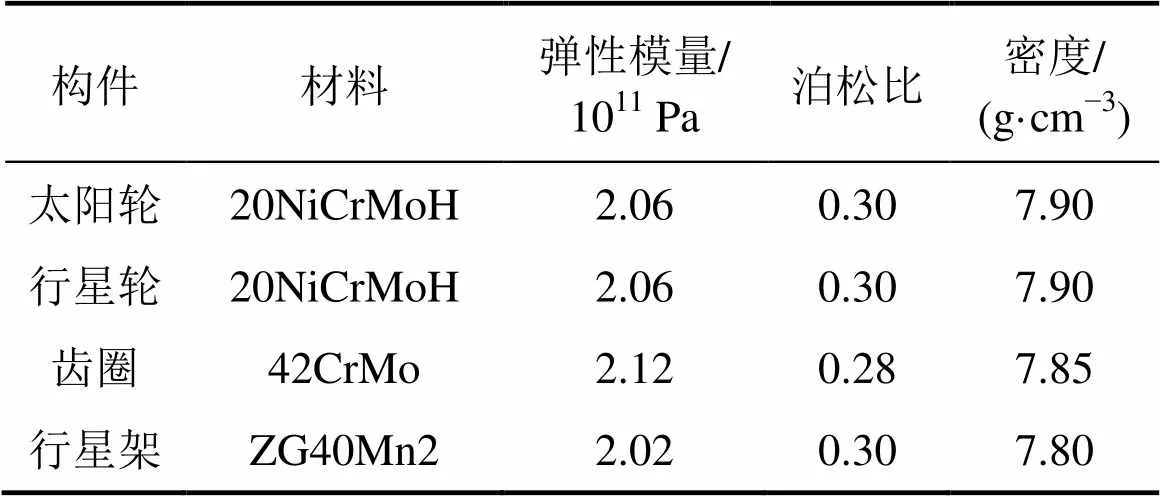
表2 复合行星齿轮系材料参数
按照实际的传动关系对复合行星齿轮系中各个构件施加约束[13]:1) 输入轴与大地之间施加固定副;2) 太阳轮S1与输入轴之间施加固定副;3) 太阳轮S2与输入轴之间施加旋转副;4) 齿圈R与输入轴之间施加旋转副;5) 行星架C与输入轴之间施加旋转副;6) 行星轮轴与行星架之间施加固定副;7) 行星轮与行星轮轴之间施加旋转副;8) 分别在太阳轮与行星轮、行星轮与行星轮、行星轮与齿圈之间添加接触力,共15对。
1.3 复合行星齿轮系接触力参数的设定
复合行星齿轮系通过齿轮啮合来实现动力与运动的传递。在ADAMS中,利用 Impact函数来计算2个齿轮之间的接触力,接触力由2个部分组成:一个是由于2个构件之间的相互切入而产生的弹性力;另一个是由相对速度产生的阻尼力。Impact函数的定 义[14−15]如下:
式中:为接触刚度;0为碰撞过程中两物体的初始距离;为碰撞过程中两物体的实际距离;为非线性指数;为阻尼系数;为击穿深度。
接触刚度的计算公式定义[14−15]如下:

式中:1和2分别为两轮齿啮合点处的当量半径(齿轮啮合传动时变形很小,可用分度圆半径近似);1和2分别为两轮齿材料的弹性模量;1和2分别为两轮齿材料的泊松比。
设定非线性指数=1.5,穿透深度=0.1 mm,阻尼系数=10 N·s/mm。根据系统参数,复合行星齿轮系接触刚度如表3所示。

表3 复合行星齿轮系接触刚度
2 复合行星齿轮系动力学仿真
以复合行星齿轮系位于前进Ⅰ档时作为仿真对象,传动路线为输入轴—S2—P2—P3—R—P1—C—输出轴,传动比为2.08,输入转速为700 r/min,负载为2×105N·mm。
2.1 转速特性分析
双排行星架的速度特性方程定义[1]为
单排行星架的速度特性方程定义[1]为
式中:s为太阳轮转速;r为齿圈转速;c为行星架转速;。复合行星齿轮系转速如表4所示。

表4 复合行星齿轮系转速
2.2 啮合频率分析
行星齿轮啮合频率公式定义[1]为
式中:为参考齿轮齿数;为参考齿轮转速;c为行星架转速;转速方向相反时取正号。
根据系统参数,复合行星齿轮系单排行星架啮合频率为168 Hz,双排行星架啮合频率为182 Hz。
2.3 啮合齿轮副啮合力理论分析
取行星轮P2位于0°的位置(即太阳轮S2回转中心与行星轮P2回转中心连线水平时)进行受力分析。设机械效率=1,太阳轮S2输入转矩公式定义为
式中:s为输入转矩;s为太阳轮角速度;c为输出转矩;c为行星架角速度。
假定行星轮P2与太阳轮S2啮合力为常量,计算公式定义为:
式中:t为切向啮合力;s为太阳轮分度圆直径;为行星轮个数;r为径向啮合力;n为法向啮合力;为压力角。
根据系统参数,s=96 kN·mm,n=648.64 N。
由图3可知,由于行星架的转动,行星轮P2所受外啮合力在绝对坐标系中轴和轴的分量随位置的变化呈周期性变化,计算公式定义[16]为
行星轮P2理想啮合力曲线如图4所示。

图4 行星轮P2理想啮合力曲线
2.4 仿真模型验证
在太阳轮S2旋转副上施加逆时针旋转驱动,转速为700 r/min(4 200 (°)/s),定义转速函数为Step(, 0,0, 0.02, 4 200),为仿真时间;在行星架C输出端施加恒定负载,转矩为2×105N·mm,定义转矩函数为Step(, 0, 0, 0.02, −200 000),仿真时间为0.5 s,仿真步进为1 000。
行星架C输出转速如图5所示。由图5可知,仿真得到的行星架转速平均值为335.667 r/min(2 014 (°)/s),系统传动比=2.085,与理论值相符。
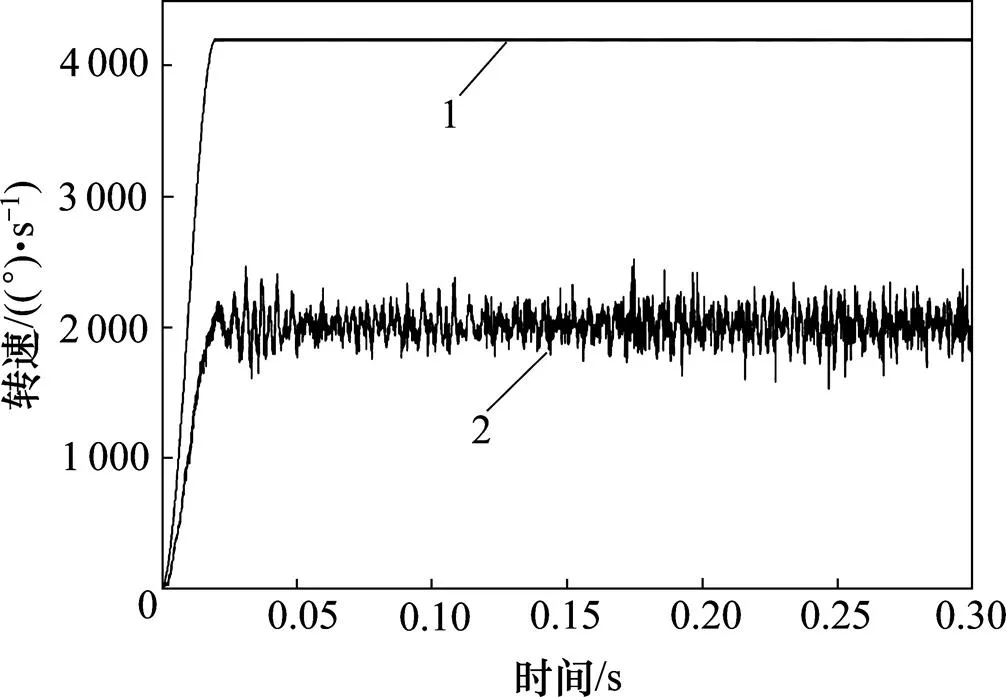
1—太阳轮S2;2—行星架C
2.5 啮合力仿真分析
取仿真时间为0.3 s,仿真步进为1 000,图6所示为行星轮P2所受外啮合力在绝对坐标系中轴分量的时域曲线。由图6可知:由于轮齿的啮入啮出,啮合力波动显著,从0 N到最大值2.112×105N再减小到0 N,波动周期为啮合周期,由于行星架的转动,存在明显的幅值调制现象,调制周期为0.18s。
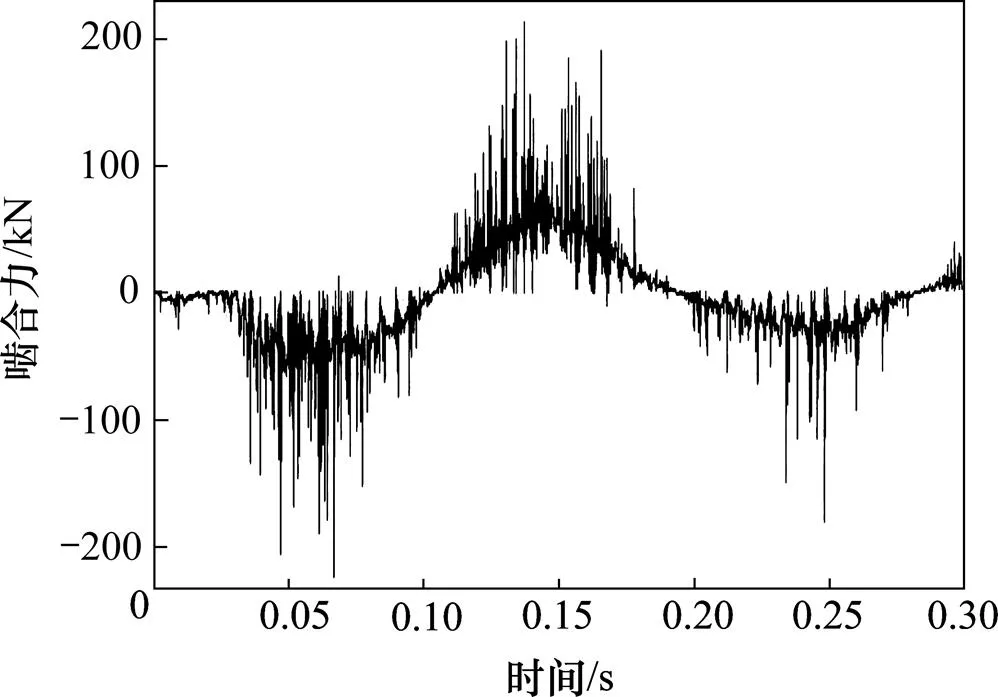
图6 行星轮P2啮合力绝对坐标系x轴分量
图7所示为行星轮P2所受外啮合力在绝对坐标系中轴分量时域曲线。由图7可见:与轴分量时域曲线相比,轴分量与轴分量幅值相当,相位差大约为π/2,时域曲线波形与理论波形相符。
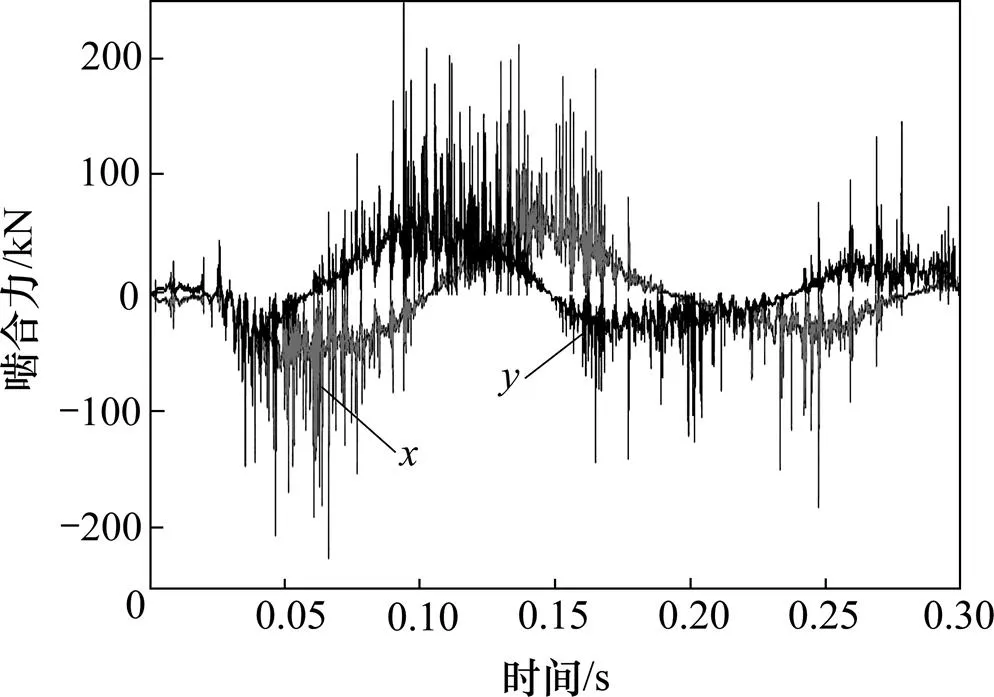
图7 行星轮P2啮合力绝对坐标系y轴分量与x轴分量对比
图8所示为行星轮P2所受外啮合力频域曲线。由图8可见:主要频率5.65 Hz与行星架旋转频率相对应,186 Hz的谱线与行星架的理论啮合频率182 Hz相对应,362.7 Hz的谱线与理论啮合频率的2倍频相对应。
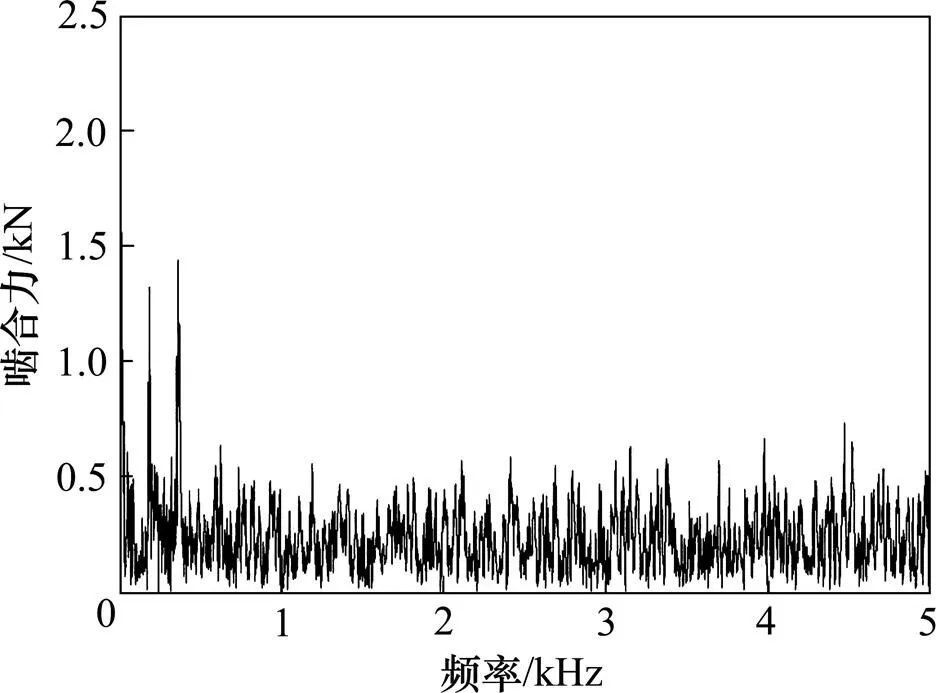
图8 行星轮P2啮合力频域曲线
3 结论
1) 以SD16再制造变速箱复合行星齿轮系为研究对象,利用Pro/E和SolidWorkrs建立了复合行星齿轮系三维实体模型,并利用ADAMS动力学仿真软件建立了系统动力学仿真模型。
2) 计算分析了系统位于前进Ⅰ档时的转速特性、啮合频率以及理论啮合力,给出了双排行星架太阳轮与行星轮理论啮合力曲线。
3) 在ADAMS仿真平台对系统动力学仿真模型进行了验证,并对双排行星架太阳轮与行星轮啮合力进行了时域和频域特性仿真研究。在时域分析中,啮合力的时域波形与理论啮合力曲线一致,幅值具有明显的波动性与周期性,在绝对坐标系中的轴分量与轴分量幅值相当,具有π/2的相位差;在频域分析中,啮合频率的1倍频与2倍频为主要频率,存在幅值调制现象,调制频率为行星架旋转频率,为SD16再制造变速箱现场故障诊断频谱分析提供了参考依据。
[1] 陈长征, 胡立新, 周勃, 等. 设备振动分析与故障诊断技术[M]. 北京: 科学出版社, 2007: 128−243. CHEN Changzheng, HU Lixin, ZHOU Bo, et al. Equipment vibration analysis and fault diagnosis technology[M]. Beijing: Science Press, 2007: 128−243.
[2] Inalpolat M, Kahraman A. A theoretical and experimental investigation of modulation sidebands of planetary gear sets[J]. Journal of Sound and Vibration, 2009, 323(3/4/5): 677−696.
[3] Inalpolat M, Kahraman A. A dynamic model to predict modulation sidebands of a planetary gear set having manufacturing errors[J]. Journal of Sound and Vibration, 2010, 329(4): 371−393.
[4] 冯志鹏, 赵镭镭, 褚福磊. 行星齿轮箱齿轮局部故障振动频谱特征[J]. 中国电机工程学报, 2013, 33(5): 119−127. FENG Zhipeng, ZHAO Leilei, CHU Fulei. Vibration spectral characteristics of localized gear fault of planetary gearboxes[J]. Proceedings of the CSEE, 2013, 33(5): 119−127.
[5] Kahraman A. Free torsional vibration characteristics of compound planetary gear train sets[J]. Mechanism and Mechine Theory, 2001, 36: 953−971.
[6] GUO Yichao, Parker R G. Purely rotational model and vibration modes of compound planetary gears[J]. Mechanism and Machine Theory, 2010, 45: 365−377.
[7] GUO Yichao, Parker R G. Sensitivity of general compound planetary gear natural frequencies and vibration modes to model parameters[J]. Journal of Vibration and Acoustics, 2010, 132(1): 1−13.
[8] 杨富春, 周晓军, 郑津洋. 复式行星齿轮传动系统综合动力学模型及振动特性研究[J]. 振动与冲击, 2011, 30(8): 144−148. YANG Fuchun, ZHOU Xiaojun, ZHENG Jinyang. Dynamic model and vibration characteristics of complex compound planetary gear set[J]. Journal of Vibration and Shock, 2011, 30(8): 144−148.
[9] 巫世晶, 刘振皓, 王晓笋, 等. 基于谐波平衡法的复合行星齿轮传动系统非线性动态特性[J]. 机械工程学报, 2011, 47(1): 55−61. WU Shijing, LIU Zhenhao, WANG Shaosun, et al. Nonlinear dynamic characteristics of compound planetary gear train sets based on harmonic balance method[J]. Chinese Journal of Mechanical Engineering, 2011, 47(1): 55−61.
[10] 刘振皓, 巫世晶, 潜波, 等. 复合行星齿轮传动系统虚拟样机仿真研究[J]. 中国机械工程, 2012, 23(16): 1962−1966. LIU Zhenhao, WU Shijin, QIAN Bo, et al. Research on virtual prototype simulation of compound planetary gear train sets[J]. China Mechanical Engineering, 2012, 23(16): 1962−1966.
[11] 陈令国. 行星齿轮传动系统的建模与仿真研究[D]. 阜新: 辽宁工程技术大学机械工程学院, 2007: 22−43. CHEN Lingguo. The research on the modeling and simulating of the planetary gear drive system[D]. Fuxin: Liaoning University. School of Mechanical Engineering, 2007: 22−43.
[12] 吴宗泽. 机械零件设计手册[M]. 北京: 机械工业出版社, 2003: 643−648. WU Zongzhe. Mechanical parts design manual[M]. Beijing: China Machine Press, 2003: 643−648.
[13] 李增刚. ADAMS入门详解与实例[M]. 北京: 国防工业出版社, 2006: 10−118. LI Zenggang. ADAMS detailed introduction and examples[M]. Beijing: National Defense Industry Press, 2006: 10−118.
[14] 李润方, 王建军. 齿轮系统动力学[M]. 北京: 科学出版社, 1997: 33−45. LI Runfang, WANG Jianjun. Gear system dynamics[M]. Beijing: Science Press, 1997: 33−45.
[15] 黄中华, 张晓建, 周玉军. 渐开线齿轮啮合碰撞力仿真[J]. 中南大学学报(自然科学版), 2011, 42(2): 379−383. HUANG Zhonghua, ZHANG Xiaojian, ZHOU Yujun. Simulation of contact force of involute gear meshing[J]. Journal of Central South University (Science and Technology), 2011, 42(2): 379−383.
[16] 刘欣. 基于虚拟样机技术的直齿行星传动动力学研究[D]. 天津: 天津大学机械工程学院, 2007: 52−69. LIU Xin. Dynamics of spur planetary gear trains based on virtual prototyping[D]. Tianjin: Tianjin University. School of Mechanical Engineering. 2007: 52−69.
Simulation of dynamic characteristics of compound planetary gear trains
LI Guoyan, LI Fangyi, ZHU Zhaoju
(Key Laboratory for Efficient and Clean Machinery Manufacturing of Ministry of Education, School of Mechanical Engineering, Shandong University, Jinan 250061, China)
In order to study the vibration spectrum of compound planetary gear train, a SD16 remanufacturing gear box was considered, and the dynamic model was established. Through the calculation and analysis of the speed characteristic, meshing frequency and meshing force of the system, the ideal meshing curve was proposed. By using ADAMS platform, the model was verified and the time domain and frequency domain characteristics of meshing force between sun gear and planet gear of the double row planetary gear in absolute coordinate were simulated to provide reference for the fault diagnosis of remanufactured gear box. The simulation results show that the waveform of meshing force in time domain can match up with the ideal meshing curve, which has notable volatility and periodic property. In the frequency domain, the frequency multiplication of 1 and 2 of meshing frequency are the main frequency, which have explicit amplitude modulating characteristic.
compound planetary gear trains; dynamic simulation model; meshing force analysis
10.11817/j.issn.1672-7207.2015.05.010
TH132.4;TP391.9
A
1672−7207(2015)05−1635−06
2014−05−10;
2014−07−29
国家高技术研究发展计划(863计划)项目(2013AA040204);国家重点基础研究发展计划(973计划)项目(2011CB013403) (Project(2013AA040204) supported by the National High Technology Research and Development Program (863 Program) of China; Project (2011CB013403) supported by the National Key Basic Research Development Program (973 Program) of China)
李方义,博士,教授,从事绿色制造与再制造研究;E-mail: lifangyi2006@gmail.com
(编辑 赵俊)
猜你喜欢
百科探秘·航空航天(2020年6期)2020-07-09
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
军事运筹与系统工程(2019年4期)2019-09-11
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
宇航计测技术(2019年1期)2019-03-25
读者(2018年20期)2018-09-27
英美文学研究论丛(2018年1期)2018-08-16
中国港湾建设(2017年11期)2017-12-19
雷达学报(2017年6期)2017-03-26