基于视频车辆运动轨迹场的交通事件检测方法
2015-10-13 01:03李倩丽宋焕生
电视技术 2015年13期
李倩丽,宋焕生,2
(1.长安大学 信息工程学院,陕西 西安 710064;2.陕西省道路交通智能检测与装备工程技术研究中心,陕西 西安 710064)
基于视频车辆运动轨迹场的交通事件检测方法
李倩丽1,宋焕生1,2
(1.长安大学 信息工程学院,陕西 西安 710064;2.陕西省道路交通智能检测与装备工程技术研究中心,陕西 西安 710064)
针对现有交通事件检测算法存在的模型复杂、运算量大,并且检测结果滞后的缺点,提出了一种基于视频车辆运动轨迹场的交通事件检测方法。该方法以基于视频的车辆跟踪轨迹为基础,形成正常车辆运动轨迹场,进而将当前车辆轨迹矢量与正常轨迹场矢量比较,最终实现了对超速、慢行、变道和逆行的异常交通事件的检测。研究结果表明,与传统方法相比,该方法算法简单,并且可以快速、准确地对异常交通事件进行检测。
视频;轨迹场;交通事件检测
随着科技的发展,基于视频的检测技术得到迅速发展,交通视频领域的研究热点也逐步转移到对基于视频检测技术的交通事件检测的研究上[1]。Fernyhough等[2]通过对视频序列中目标的跟踪轨迹学习、分析,构造出事件模型,实现对异常事件的预测和检测;Mohnhaupt等[3]通过建立三维场景,得到交通检测数据,例如车辆的行驶方向及位置等;Kumar[4]利用运动目标与交通场景内的静态物体以及动态目标之间的相互关系检测异常事件。以上这些算法都存在运算量大、模型复杂的缺点。伍友龙[5]通过直线拟合,将复杂的运动车辆跟踪轨迹曲线拟合为直线,将轨迹曲线曲率变化用直线差角代替,分析得到运动车辆行驶方向变化,从而实现对异常事件的检测,该算法简单,但是不能满足实时检测事件的要求。
针对目前现有的交通事件检测算法存在的缺点,本文提出了一种基于视频的车辆运动轨迹场的交通事件检测方法,在目标车辆提取与跟踪过程中,采用了传统的基于像素块的帧间差分法提取运动目标[6]和基于特征的跟踪方法[7]。而对于事件的检测部分,本文提出一种新的检测方法,在视频图像中形成一个正常车辆运动的轨迹场,将当前车辆运动轨迹矢量与正常轨迹场矢量比较,最终实现了对超速、慢行、变道和逆行的异常交通事件的检测。
1 基于目标特征点的跟踪
异常交通事件的检测是建立在对运动车辆跟踪并获得其运动轨迹的基础之上,因此,车辆行为分析的精度很大程度上取决于对运动车辆跟踪的准确性。
本文采用基于特征的目标跟踪算法,使用基于像素块的帧间差分法进行运动目标提取,其公式如下
(1)

特征的提取是基于特征的动态目标跟踪方法的关键所在,本文以块为单位选择角点为特征点,选择Moravec角点检测算法,实现对目标的跟踪,其计算公式为

GrayImage[x+i][y+j])2
(2)
由于需要计算角点周围8个块的能量变化情况,其计算量较大,为减少运算量,本文只计算观察窗口在左、右斜对角线方向以及横向、纵向4个方向上平均能量的变化情况,并为尽量避免乘方运算,使用绝对差值代替能量值进行计算,取绝对差的最小值作为该点的角点兴趣值。
本文采用块匹配法,以角点所在块为中心,在其周围选择一定大小的区域作为匹配模版,以SAD为匹配准则,采用全搜索法在时间序列中选择该角点的匹配位置,进而实现目标跟踪。
2 车辆运动轨迹场的形成
在不影响检测结果的前提下,为减少计算量,首先将图像划分成小块,块的大小应与帧差法提取运动目标时所取块大小相同,再以每个小块中心为原点建立如图1所示的局部坐标轴,其中实线为局部坐标轴,虚线为图像坐标轴。
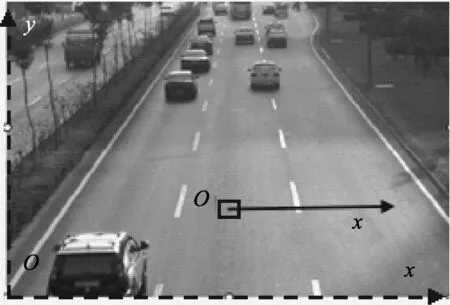
图1 局部坐标轴与图像坐标轴示意图
在视频序列播放过程中,保存视频序列中轨迹长度满足跟踪150帧以上的运动车辆行驶轨迹信息,轨迹的信息包括轨迹线上每个轨迹点的坐标、长度、方向,其中坐标指轨迹点相对于视频图像坐标轴的位置坐标,长度指当前轨迹点相对于在同一条轨迹线中上一帧保存的轨迹点之间的距离,单位为像素,方向指当前轨迹点与在同一条轨迹线中上一帧保存轨迹点之间的连线相对于当前轨迹点所在小块局部坐标轴的角度。当视频序列播放到1 500帧时(根据场景中车流量设定,此处的车流量为先验所得),将1 500帧中保存的所有经过每个小块的轨迹点的长度和方向分别求和、求平均,最后平均值作为每个小块相对于局部坐标轴的二维矢量,所有小块的二维矢量就构成了运动车辆的轨迹场,如图2所示。

图2 运动车辆轨迹场
3 交通事件检测
当发生变道、逆行、慢行、超速异常交通事件时,其对应的异常车辆轨迹矢量与正常车辆轨迹矢量对比示意图如图3所示,其中实线为正常轨迹,虚线为异常轨迹。定义异常轨迹与正常轨迹之间长度差为Δd,夹角为Δθ,计算公式分别为式(3)和(4)
Δθ=abs(θ(x,y)-θ(xi-yi))
(3)
Δd=d(x,y)-d(xi-yi)
(4)
式中:θ(x,y),d(x,y)分别表示中心位置为(x,y)的小块的二维矢量的方向和长度;θ(xi,yi),d(xi,yi)分别为当前处在以(x,y)为中心的小块内轨迹点的方向和长度。
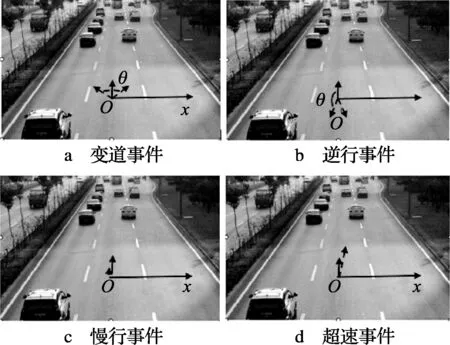
图3 异常车辆轨迹矢量与正常车辆轨迹矢量对比示意图
变道时对应满足条件为Δθ值为(60°,180°),逆行时对应条件为Δθ满足(180°,360°),慢行时对应的条件为d
4 实验结果与分析
本文提到的方法,采用VC++6.0的开发工具,对几段视频(720×288,25 f/s)进行了测试,在帧差提取运动目标部分,块的大小n采用8×6,阈值T确定为30时提取到的运动目标效果最好,平均处理速度为每帧20 ms,完全满足了实时处理的需求。图4为变道、逆行、超速、慢行检测结果,正常车辆运动轨迹形成的二维矢量,为方便观察,长度为相隔5帧的距离,单位为像素。图中轨迹编号为该轨迹在当前视频图像序列中被检测到的顺序编号,该方法不需要二维空间映射、三维空间映射的复杂程序,大大提高了程序的处理速度。
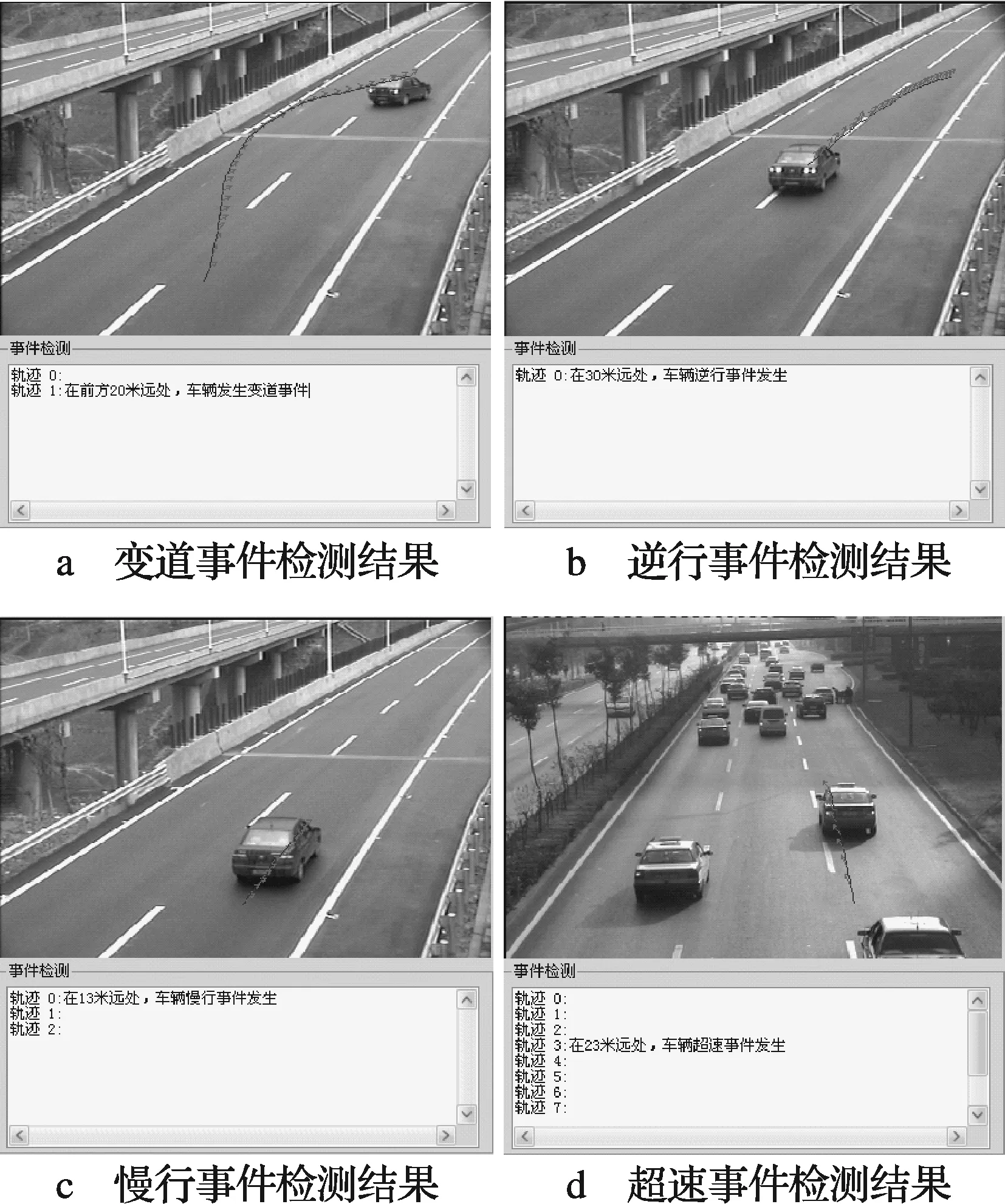
图4 异常交通事件检测结果
5 结论
本文采用在视频图像上建立正常车辆行驶的轨迹场,通过当前车辆轨迹矢量与轨迹场矢量相对比的方法,实现了对超速、慢行、逆行、变道等常见异常交通事件的检测。实验表明,该方法算法简单,可以快速、准确地检测到异常交通事件的发生,有待在其他异常交通事件的检测上进一步应用,以及在视角、天气、车辆遮挡等可能导致目标跟踪丢失的交通场景下检验其算法的普遍性。
[1] 徐杨,吴成东,陈东岳. 基于视频图像的交通事件自动检测算法综述[J].计算机应用研究,2011,28(4):1206-1210.
[2] KAMIJO S,MATSUSHITA Y,IKEUCHI K M,et al.Traffic monitoring and accident detection at intersections[J].IEEE Trans. Intelligent Transportation Systems,2000,1(2):108-118.
[3] MOHNHAUPT M,NEUMANN B. On the use of motion concepts for top-down control in traffic scenes[C]//Proc. Eur. Conf. Computer Vision.Antibes,France:[s.n.],1990:598-600.
[4] KUMAR P,RANGANATH S,HUANG Weimin,et al.Framework for real-time behavior interpretation from traffic video[J].IEEE Trans. Intelligent Transportation Systems,2005,6(1):43-53.
[5] 伍友龙. 基于图像分析的高速公路交通事件检测算法研究[D].长沙:长沙理工大学,2005.
[6] YIN Hongpeng,CHAI Yi,YANG Xiaoyan. Fast-moving target tracking based on mean shift and frame-difference methods[J].Systems Engineering and Electronics,2011,22(4):587-592.
[7] SONG Huansheng,LU Shengnan,MA Xiang,et al. Vehicle behavior analysis using target motion trajectories[J].IEEE Trans. Vehicular Technology,2014,63(8):3580-3591.
宋焕生(1964— ),教授,博士生导师,从事基于机器视觉的交通感知及交通预警方面的研究。
责任编辑:任健男
青岛海尔入股兆驰股份 布局智慧家庭生态圈
近日,青岛海尔发布公告,拟出资3.7亿元认购兆驰股份非公开发行股份3 000万股。认购完成后,青岛海尔占兆驰股份届时已发行股份总数的1.58%,将成为兆驰股份股东,双方将在促进U+战略落地等方面开展合作。
据了解,兆驰股份目前主要从事消费类电子产品生产等业务,并拟由消费类电子制造向互联网电视运营商转型。
对于入股兆驰股份,海尔在公告中称,此举旨在“进一步促进海尔U+智慧生活战略的落地,布局智慧家庭生态圈,提升用户体验,聚集用户流量。”
Method of Detecting Traffic Incident Based on Vehicle Trajectory Field
LI Qianli1, SONG Huansheng1,2
(1.DepartmentofInformationEngineering,Chang’anUniversity,Xi’an710064,China;n>andTechniqueResearchCenterforRoadandTrafficDetection,Xi’an710064,China)
Currently the existing traffic incident detection algorithm has some disadvantages such as complex model, heavy computation. And the detection result has time lag. In this paper, a method of detecting traffic incident based on vehicle trajectory field is introduced. The method obtains the video-based vehicle tracking trajectory, establishes a normal vehicle trajectory field, then compares the current vehicle trajectory with the normal vehicle trajectory field and realizes the function of abnormal traffic incident detection such as over-speed, low running speed, changing lane, retrograde in the end. The results show that compared with the traditional approaches, this approach has simple algorithm and also can detect traffic incidents quickly and accurately.
video; trajectory field; traffic incident detection
【本文献信息】李倩丽,宋焕生.基于视频车辆运动轨迹场的交通事件检测方法[J].电视技术,2015,39(13).
国家“863”计划项目(2014G3242005)
TN391.9
A
10.16280/j.videoe.2015.13.011
李倩丽(1989— ),女,硕士生,主研视频检测技术、图像处理;
2014-12-04
猜你喜欢
数理化解题研究(2021年34期)2021-12-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
现代防御技术(2016年1期)2016-06-01
中学生数理化·高二版(2016年7期)2016-05-14
新高考·高一物理(2016年1期)2016-03-05