
一种地面对靶发射试验方法的设计分析
2015-10-14 03:21秦亮
河南科技 2015年23期
秦亮
(中国空空导弹研究院,河南 洛阳 471009)
一种地面对靶发射试验方法的设计分析
秦亮
(中国空空导弹研究院,河南洛阳471009)
空空导弹研制过程需要进行一系列地面对靶发射试验,以解决导弹制导系统对真实目标的截获跟踪能力。传统的地面引导系统使用高精度雷达,这种雷达波束很窄,地面试验中雷达一旦跟踪过程出现丢失目标无法引导的情况,就会导致试验无法进行。本文利用靶机下传的GPS信息,通过GPS地面接收系统接收和数据处理计算机处理后,形成引导地面发射系统所需的俯仰、方位和导弹所需的飞行任务。该方法省去了传统所必须的雷达,并且彻底解决了小目标、超视距地面靶试中雷达无法稳定跟踪的问题,从而大大提高了试验效率和试验结果的有效性,节约了试验经费和时间。
空空导弹;炮瞄雷达;飞行任务;坐标变换;GPS靶机
空空、地空导弹研制过程中需要在靶场进行大量的地面对靶发射试验,以检验产品研制各个阶段的技术状态,该试验的前提是必须保持地面跟踪设备对目标的稳定截获,以完成给产品装订飞行任务等一系列操作[1]。传统的地面对靶发射试验是使用一种高精度炮瞄雷达为导弹指引目标,而这种雷达波束很窄,不具备大范围自动搜索功能[2],实际使用中需要目标搜索雷达完成目标的搜索和截获,如图1所示。随着模拟隐身目标的小型无人靶机技术的成熟和在地面对靶发射试验中的应用,给地面搜索和截获雷达提出了严重的挑战,在试验中一旦目标丢失,很难再次跟踪截获,造成了大量的人力、物力、财力的浪费和试验的失败。
本文就是利用日益广泛使用的GPS全球定位技术,设计一种基于GPS的全新地面对靶发射试验方法,来取代传统的基于雷达的地面对靶发射系统,为飞行试验节约了时间和成本,创造了良好的经济效益。

图1 传统的雷达系统组成图
1 方案设计
1.1系统组成及工作原理
该方法与传统的基于雷达的地面对靶发射控制系统有所不同,它主要有靶机GPS发射系统,地面GPS接收系统,数据处理系统,数据传输系统,地面发射系统等组成,如图2所示。其中,靶机GPS发射系统主要包括安装在靶机上的GPS接收天线、GPS接收机、功率放大器、数传电台以及全向发射天线等,它主要实现靶机GPS信号的接收、放大和发送。地面接收系统包括接收天线、功率放大器、数传电台和射频线等,主要实现对靶机发射的GPS信息的接收和射频到基带的转换。数据处理系统主要后数据处理计算机、总线接口以及处理软件组成,其中数据处理计算机是整个系统的控制中心,用于获取发射系统原点的GPS位置,通过专用的数据处理软件把WGS-84系下的靶机GPS位置(经度L、纬度B、海高H)转换成空间直角坐标系下的位置坐标(X,Y,Z),再转换成导弹所需要的惯性系下的信息。数据传输系统组要有总线接口、数据传输线缆组成,主要完成数据的远距离传输。地面发射系统主要有随动平台,发射装置、以及操作台灯组成,主要实现导弹产品的挂装,校靶以及发射控制等功能。
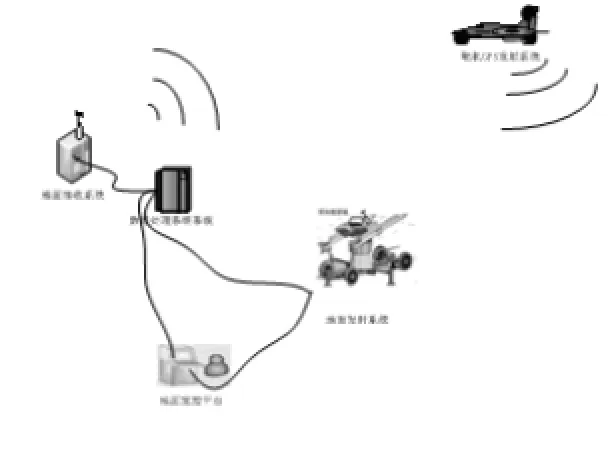
图2 基于GPS靶机的系统组成图
目标信息的解算
要想实现地面对靶发射试验,完成给导弹传递飞行任务的功能,首先需要将靶机的GPS位置和速度信息结算到导弹所在的惯性坐标系中。目前广泛使用的GPS接收机所获得的定位数据是基于WGS-84坐标系,而雷达惯性坐标系建立与雷达位置和方向有关,原点位于地表,X轴平行于地表,Y轴天向,Z轴与X和Y轴构成右手系,为了利用GPS信息对导弹进行指示引导,必须进行WGS-84坐标系和雷达惯性坐标系之间的转换[3]。
a)WGS84坐标系转换为地球直角坐标系
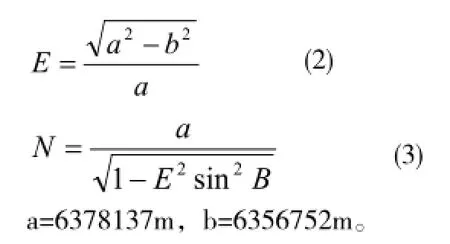
假如地球表面一点P在地球直角坐标系内为P(X,Y,Z),在大地坐标系内为P(B,L,H),则大地坐标系转变直角坐标系:

式中N为椭球的曲率半径,E为第一偏心率,B为纬度,L为经度,H为高度(WGS84系)。
地球的长短半径分别为a、b,则:
b)地球直角坐标系变换为惯性系下的导航坐标
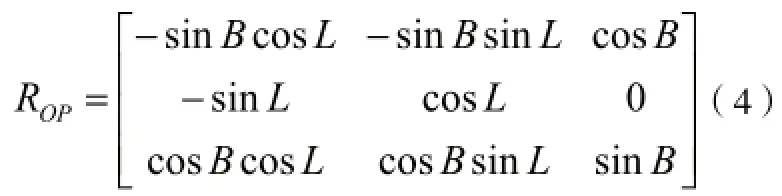
式中B、L分别为WGS84坐标系下P点的纬度和经度。
利用旋转矩阵对WGS84的坐标系旋转和平移,即可完成WGS84坐标系到北东天坐标系的转换:

2 系统误差分析
要想实现用GPS信息取代雷达引导导弹攻击靶机,并给导弹传递所需要的飞行任务,完成对目标的攻击,最重要的要保证整个系统的动态误差在导弹可接收的范围,这样才能保证导弹中末制导交接的顺利完成,下面探讨下影响整个试验结果的几个关键因素。
2.1数据实时性
与传统雷达不同,基于GPS靶机的数据天地传输路径为:卫星--天线-->靶机GPS接收机-->数传电台-->发射电线;地面传输路径为:接收天线-->数传电台--RS232-->数据处理计算机--RS485-->适配器-->随动平台。其中,GPS数据下传速率取决于GPS接收模块的最大数据输出率,目前我们常用的车载或手机的GPS模块为1Hz,无法满足定位误差和实时性要求,本方案中我们选用JAVAD JGG100,它的数据输出率最大为20Hz,定位误差为实时误差±15m,实时测速误差为±1m/s。这样天地传输延时最大延时0.05s;根据美国国家海洋电子协会的NMEA 0183标准协议,我们选取$GPGGA进行传输,RS232的数据传输波特率为9600bps,传输的完整一帧数据长度为94个字,加上起始位和停止位(无奇偶校检位)约为9400个位,时间大约为0.1s;数据处理计算机给适配器发送数据周期是24ms,RS485的数据传输波特率为38.4kbps,每帧传送210个字,加上起始位、停止位和奇偶校检位,约2310个位,时间延迟大约为0.06s;数传电台、数据处理计算机以及适配器的数据处理时间都是毫秒级,可以忽略不计,所以整个链路数据传输时间延迟约为0.11s。
这样从靶机上的GPS接收机接收到GPS信息到数据处理计算机将接收到的GPS信息处理成随动平台和导弹各自需要的目标信息,所需要的时间大约为0.11s,目前所需要的靶机一般速度为亚音速,也就是说靶机在这段时间内最大的飞行距离为0.11s×340m/s=37.4m。以美国AIML/M响尾蛇导弹最大射程7Km计算,由于GPS实时传输而引起的引导跟踪最大实时误差为0.306°,完全满足导弹引导要求。
2.2信号丢失问题
由于目前我们使用的GPS卫星波段为民用的L1波段(中心频率为1575.42MHz),容易受到遮挡而出现信号丢失的问题,在真正的地面对靶发射试验中,靶机在飞行过程中为了完成固定的航线,必然出现转弯或者翅膀抖动的现象,这样就可能造成GPS信息的丢成。在GPS数据丢失期间,地面发射系统因收不到目标的俯仰和方位而无法进行实时跟踪,导弹无法更新飞行任务,这样就会增加整个引导的动态误差,当动态误差达到导弹无法接受的程度,就可能出现地面导弹无法跟踪上目标靶机,造成试验的暂时性中断,给试验带来了安全隐患。为了消除由于靶机抖动或转弯造成的GPS信息丢失的问题,软件上可以采用滤波算法,如果GPS信息丢失后进进行递推,硬件上可以采用目前较为成熟的GPS天线阵列设计,在靶机的对称翅膀上安装GPS天线阵,这样无论靶机怎样抖动,总有至少一个GPS接收天线朝向卫星,从而避免了由于遮挡而造成GPS信号丢失的问题。
2.3靶机影响
除了上述影响因素之外,靶机的飞行姿态也会对动态误差有影响。由于动态误差只与导弹对靶机视线的切线角速率有关,如果靶机沿导弹视线方向飞行,那么理论上GPS引导的动态为零。只有靶机沿导弹对靶机视线的切线方向飞行,靶机的飞行速度才能对动态误差产生最大的影响。而实际使用中,一般设计靶机对地面发射系统的航路捷径为1~2Km,这样实际使用中导弹对靶机视线的切线角速率往往变化很小。
3 结语
本文利用靶机下传的GPS信息,通过GPS地面接收系统接收和数据处理计算机处理后,通过专用的数据处理软件把WGS-84系下的靶机GPS位置转换成导弹所需要的北东天惯性系下的信息,经特定格式打包后引导地面发控系统,并形成导弹所需的飞行任务。此方法在地面发控系统中省去了传统所必须的雷达,并且彻底解决了小目标、超视距地面靶试中雷达无法稳定跟踪的问题,从而大大提高了试验效率和试验结果的有效性,节约了试验经费和时间。
[1]王德周,李耀民.基于GPS技术辅助雷达引导系统设计[J].计算机测量与控制,2013(1).139-141.
[2]702D炮瞄雷达使用维护说明书[Z].中国兵器工业第二零六研究所.
[3]杨晨,叶少杰,周颐.空空导弹试验和鉴定[M].北京,国防工业出版社.2007.
[4]张建学.空空导弹GPS飞行轨迹软件的设计与实现[J].电子设计工程,2012(1).139-141.
[5]何睿,张坚武.GPS电子地图坐标转换方法研究[J].火控雷达技术,2006,6(35):82-84.
[6]徐德伟,李海舰,曹城中.WGS-84坐标系统向地方坐标系转换过程的研究[J].淮海工学院学报2009.(1):66-68.
[7]李征航,黄劲松.GPS测量与数据处理(第二版)[M].武汉:武汉大学出版社,2011.
[8]桂延宁,张福顺,焦李成.飞行轨迹及参数测量的一种新方法[J].电子学报,2003(12):1894-1896.
S223.2
A
1003-5168(2015)-12-0055-2
秦亮(1987-),男,硕士,研究方向:导弹飞行试验研究。
猜你喜欢
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
无人机(2019年9期)2019-11-29
无人机(2018年4期)2018-09-10
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中国惯性技术学报(2015年1期)2015-12-19
小学科学(2015年10期)2015-10-20
西华师范大学学报(自然科学版)(2015年3期)2015-02-27
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
