
一种改进的非定常气动力模糊逻辑建模方法
2015-10-22 09:41吕永玺章卫国王敏文史静平
西北工业大学学报 2015年6期
吕永玺,章卫国,王敏文,史静平,
(1.西北工业大学自动化学院,陕西西安 710072;2.飞行器一体化技术重点实验室,陕西西安 710072)
一种改进的非定常气动力模糊逻辑建模方法
吕永玺1,章卫国1,王敏文2,史静平1,2
(1.西北工业大学自动化学院,陕西西安 710072;2.飞行器一体化技术重点实验室,陕西西安 710072)
针对飞机过失速机动时气动力和气动力矩出现严重的非线性、耦合性和迟滞性等现象,提出了一种改进的模糊逻辑非定常气动力建模方法。该方法基于大幅振荡风洞实验数据分析结果,充分考虑了影响飞机气动力和气动力矩的不同因素,通过二次型隶属度函数将迎角、迎角导数、迎角二阶导数、侧滑角和缩减频率等转化为模糊输入,将模糊规则计算出的气动力和气动力矩作为模糊输出。与其他方法相比,该方法能够对模糊逻辑模型的结构和参数统一辨识,通用性强,模型精度满足给定的多层相关系数要求。最后,根据奇异摄动理论,设计了时标分离的动态逆控制律,采用了串接链方法实现过驱动系统的舵面偏转分配。通过对比常规气动力和非定常气动力下典型的“眼镜蛇”机动仿真结果,说明了过失速机动时建立精确非定常气动力模型的必要性,也验证了动态逆方法对于非线性系统有良好的控制效果。
过失速机动;非定常气动力;模糊逻辑;动态逆;串接链
近距格斗是先进战斗机超机动性能的标志,要求战斗机在低速大迎角时仍能实现可控指令战术机动动作——过失速机动。过失速机动时,机翼表面的气体由单一的附着流动到旋涡流动、旋涡破碎直至发展为分离流动,气体流动滞后和各部件涡系之间相互干扰比较严重,这些导致了飞机大机动时气动力和气动力矩的非线性、多轴耦合性和迟滞等特性。因此,传统的气动模型在大迎角时已不再适用,有必要建立精确的非定常气动力模型。对于非定常气动力的建模,文献[1]总结的方法有代数多项式模型、Fourier函数分析模型、状态空间模型、差分方程模型和模糊逻辑模型等,这些方法从不同角度分析了迟滞非线性现象的机理,所适用的情形各部相同,其中模糊逻辑建模方法通用型最强。模糊逻辑模型由Wang等[2]在1999年提出,该方法基于模糊数学原理,通过设置模糊输入、模糊规则和模糊输出等,来获得非定常气动力与飞机飞行状态量之间的联系。尹江辉等[3]讨论了隶属函数导数的连续性对模糊逻辑模型精度的影响。孔轶男等[4]利用振荡三角翼的实验数据建立了非定常气动力的2种模糊逻辑模型:①采用减缩频率进行建模;②考虑时间历程对非定常气动力的影响。这些方法不能指定模糊逻辑模型的辨识精度。
针对过失速机动的特性,直接采用非线性控制策略是必然途径。在众多的非线性控制方法中,动态逆方法的应用最广,原因在于动态逆能使非线性和线性兼容,可以进行通道间解耦,无需复杂的增益调参,被控对象参数的改变不影响其线性解耦控制结构及其增益,是一种一般化的通用控制策略和方法。非线性动态逆方法[5]通过全状态反馈和矩阵求逆,将原仿射非线性系统转化线性系统,从而可用线性系统的控制理论进行控制设计。根据奇异摄动理论,将动态逆分为快回路和慢回路设计。张力等[6]依据逆系统理论对推力矢量飞机进行了适用于过失速机动和超敏捷性研究的控制系统设计。谢蓉等[7]应用动态逆设计飞行控制律,并采用PID控制补偿由于未精确建模带来的系统逆误差。这些方法没有考虑非定常气动力,同时求解舵面偏转时采用伪逆方法,没有考虑舵面限制而且舵面分配效率比较差。
1 问题描述
以某型飞机大幅振荡风洞实验测量数据为例,选取机体系中法向力系数,其静态测量数据和动态数据如图1所示。

图1 法向力系数随迎角变化图
图中大幅振荡时的迎角变化为:

式中,α0=40°为振荡中心迎角,αm=40°为振荡幅值,ω=2πf为振荡角频率,f为振荡频率,缩减频率kω=2π·f·cA/V,cA为平均气动弦长,V为飞行速度。
由图中动态数据可知,当飞机在大迎角大机动时,迎角增加和减小所对应的气动力系数差别很大,具有严重的非线性和迟滞性,并且这种差别与振荡缩减频率正相关。
给出常规气动力计算如(2)式

由常规气动力计算公式引申的简单非定常气动力模型为代数多项式模型[1]:

式中,如果Ci仅仅与α有关,那么

上式中的ai0可以通过最小二乘等方法计算得出。这种非定常气动力的建模方法虽然简单且和常规气动力计算原理相近,但是其适用性很差,其代数项的个数针对不同的数据而不同,同时其建模精度也很差。
针对上述代数多项式模型的缺点,模糊逻辑模型凭借其通用性强的优点被广泛利用。但是模糊逻辑在建模过程中精度时好时坏,有时不能够满足建模精度要求,因此本文针对模糊逻辑模型提出了一种改进的模糊逻辑建模方法。
2 模糊逻辑模型基础知识
本文中采用的模糊逻辑模型主要包括4个元素:隶属函数、内部函数、模糊规则和输出单元[2]。
2.1模糊逻辑模型的隶属函数
建立模糊逻辑模型的过程中最重要的是确定隶属函数。以俯仰振荡为例,输入的模糊变量有:迎角、迎角的一阶和二阶导数、侧滑角和缩减频率,每个模糊变量的值分为多个空间,每个空间表示为一个隶属函数,这样为输入变量提供了内部函数的隶属度。输入变量的范围通过(4)式转换到区间[0,1]。

本文中所选取的隶属函数是具有连续导数的二次型形式。
2.2模糊逻辑模型的内部函数
本文中用内部函数代替了传统的模糊集合关系矩阵,内部函数与输入变量呈线性关系,形式如(5)所示:

式中,下标k为输入变量的个数,yi为气动力和气动力矩,xi为输入变量,,j=1,2,…,k:内部函数的系数,需要进行辨识。
2.3模糊逻辑模型的模糊规则
对于模糊模型输入空间中的每个变量,可以选择多个隶属函数,这样将输入空间分为若干个模糊子空间。在模糊逻辑模型中,对每一个模糊输入变量取一个隶属函数就构成了一个模糊单元,从而第i个模糊单元的规则描述为:如果变量x1的隶属函数为,x2的隶属函数为,…,xk的隶属函数为,那么这个模糊单元的输出就是1.2节中给出的模糊单元的内部函数:对于每个模糊单元,均有一个内部函数来计算输出,从而内部函数的个数等于模糊单元的个数。如果将输入变量xi划分为Ni个隶属函数,那么总的输出单元的个数:n=N1×N2×…× Nk。
2.4 模糊逻辑模型的输出
模糊逻辑模型的输出为所有模糊单元输出的加权平均数。本文中每个单元的输出权值设为隶属函数等级的乘积值,由(6)式所示:

对于第j个输入样本(x1j,x2j,…,xkj),由模糊逻辑模型计算得到的输出为:

式中,i=1,2,…,n表示第i个单元,n为模糊单元总数,j=1,2,…,m表示第j个样本,m为数据样本总数。
3 改进的模糊逻辑模型辨识算法
3.1模糊逻辑模型辨识相关知识
对于模糊逻辑模型的辨识,一般采用牛顿梯度下降法来辨识模糊逻辑模型的参数,借助正向搜索算法来辨识模糊逻辑模型的结构。
首先给出衡量所建立的模糊逻辑模型精度的均方差(S)和与多层相关系数(R2)的定义:


式中,αr是收敛因子,其取值范围是(0,1)。采用当地均方差修正后,参数辨识公式如下:

3.2改进的模糊逻辑模型辨识算法
本文提出了一种统一的模糊逻辑模型辨识算法,该算法将模糊逻辑模型的结构和参数辨识统一,在辨识过程中只需要改变所要辨识的气动力或气动力矩类型,根据算法中的边界和终止条件便可以得到最优的模糊逻辑模型结构和参数。本文中提出的辨识的算法具体步骤如下:

Step4 NG=NG+1,如果NG=5k则终止程序,否则每个模糊变量隶属函数的个数根据循环嵌套增加,其他参数根据Step1中重新设置后转入Step2。
4 动态逆控制律设计
考虑到非定常气动力对飞机控制的影响,所以采用时标分离的非线性动态逆方法设计了快回路和较慢回路控制律。由于伪逆法不考虑舵面位置和速率限制等问题,因此在此采用串接链的分配方法来通过动态逆求取舵面偏转值[8],具体实现:首先考虑气动规舵面us=[δe,δa,δc,δqj,δhj],如果气动舵面出现饱和或者舵效值不够,则考虑矢量喷口ut= [δtx,δty]的偏转,则动态逆内回路气动舵面和矢量喷口的解算如下:
式中,函数P(·)表示舵面或矢量喷口偏转限制,gs(x)为常规舵面的舵效矩阵,gt(x)为矢量喷口的效能矩阵。其结构图如图2所示:

图2 基于串接链的动态逆内回路设计结构图
对于较慢回路的控制律设计,则和通常情况下的动态逆设计一样,将快回路作为内回路,将较慢回路解算出的指令作为内回路的参考输入,这里不再给出设计过程。
5 仿真验证
5.1改进的模糊逻辑建模结果
对于俯仰大幅振荡,辨识结果如表1所示:(表中气动系数是机体系中的力和力矩系数)

表1 常规模糊逻辑模型辨识结果

表2 改进的模糊逻辑模型辨识结果
由常规模糊逻辑辨识结果和改进以后的模糊逻辑辨识结果相比较,可知改进的模糊逻辑算法总能够找到满足精度要求(R2=0.995 0)的模糊逻辑结构和参数,并且每个变量的隶属度函数个数少于常规模糊逻辑模型。
最终对于改进的非定常气动力的模糊逻辑模型拟合结果如图3至图5所示。这里将改进的模糊逻辑建模结果和非线性代数模型相比较,可见模糊逻辑模型的建模精度比较高,对于振荡数据的拟合程度较好。在计算时间方面,改进的模糊逻辑计算时间比非线性代数模型的计算时间明显要长,但是由于实际应用中结构和参数都已经离线计算好,从而离散计算时间较长对于这种方法的应用无影响。因此,本文提出的改进模糊逻辑建模方法是很有工程应用价值的。

图3 法向力系数辨识结构 图4 轴向力系数辨识结果 图5 俯仰力矩辨识结果
5.2“眼镜蛇”仿真结果
由于非定常气动力在大机动时才表现得很明显,所以选择“眼镜蛇”大机动来验证,其操纵规律如下:选择初始状态V=70 m/s,H=3 000 m,β,μ始终为0。期望的迎角αc在保持配平迎角飞行1 s后迅速增加到70°,保持1 s后迅速减小到配平迎角。
整个仿真结果和对比如图6和图7所示。第1种情况是考虑常规气动力,第2种情况是考虑非定常气动力。

图6 “眼镜蛇”动作跟踪效果对比
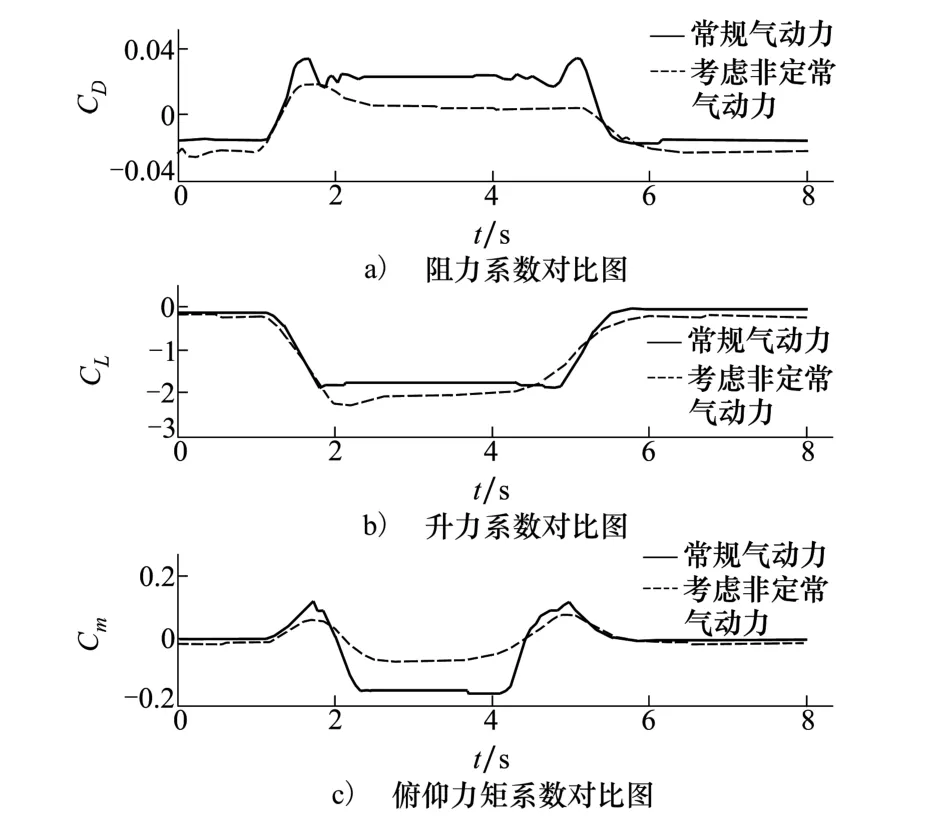
图7 气动力系数和气动力矩系数对比
由图6中仿真曲线可知:对于第2种情况,当期望迎角指令处于70°附近时,迎角跟踪效果差,尤其是在迎角由70°快速变化到配平迎角时,非线性迟滞现象很明显。这也导致了图7中2种情况下气动力和气动力矩差别很大,其中第2种情况下升力系数的峰值达到了大幅振荡风洞试验数据的峰值。总体来看,第2种情况更加符合飞机实际飞行状况。
6 结 论
本文针对过失速机动时气动力和气动力矩的非定常现象,提出了一种改进的非定常气动力模糊逻辑建模方法,仿真结果表明该方法能够对模糊逻辑模型的结构和参数进行统一辨识,模型精度满足给定的多层相关系数要求,模糊变量隶属函数的个数少,有利于工程实际中的应用。同时对于典型的过失速机动“眼镜蛇”动作设计了基于串接链的动态逆控制律,使得多变量的非线性系统成为相互解耦的线性系统,取得了良好的控制效果,说明了过失速机动时考虑非定常气动力更加符合飞机实际飞行状况。
[1] 孙海生,张海酉,刘志涛.大迎角非定常气动力建模方法研究[J].空气动力学学报,2012,29(6):733-737
Sun Haisheng,Zhang Haiyou,Liu Zhitao.Comparative Evaluation of Unsteady Aerodynamics Modeling Approaches at High Angle of Attack[J].Journal of Aerodynamics,2012,29(6):733-737(in Chinese)
[2] Wang Z,Lan C E,Brandon J M.Fuzzy Logic Modeling of Nonlinear Unsteady Aerodynamics[R].AIAA-1998-4351
[3] 尹江辉,刘昶.非定常气动力辨识的模糊逻辑方法[J].南京航空航天大学学报,2000,32(5):545-550
Yin Jianghui,Liu Chang.Fuzzy Logic Technique of Unsteady Aerodynamic Identification[J].Journal of Nanjing University of Aeronautics&Astronnautics,2000,32(5):545-550(in Chinese)
[4] 孔轶男,王立新,何开锋,等.过失速机动的模糊逻辑建模仿真[J].北京航空航天大学学报,2007,33(10):1174-1177
Kong Yinan,Wang Lixin,He Kaifeng,et al.Fuzzy Logic Models for Unsteady Post Stall Maneuver[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(10):1174-1177(in Chinese)
[5] Snell S A,Nns D F,Arrard W L.Nonlinear Inversion Flight Control for a Supermaneuverable Aircraft[J].Journal of Guidance,Control,and Dynamics,1992,15(4):976-984
[6] 张力,王立新.推力矢量飞机控制律设计及过失速机动仿真研究[J].飞行力学,2008,26(4):1-3
Zhang Li,Wang Lixin.Research on Flight Control Law Design of Fighter with Vectoring Thrust and Post-Stall Maneuver Simulation[J].Flight Dynamics,2008,26(4):1-3(in Chinese)
[7] 谢蓉,王新民,李俨.超机动飞机动态逆-PID控制器设计[J].飞行力学,2009,27(2):67-71
Xie Rong,Wang Xinmin,Li Yan.Dynamic Inversion-PID Controller of a Supermaneuverable Aircraft[J].Flight Dynamics,2009,27(2):67-71(in Chinese)
[8] 史静平,章卫国.基于AMS结构分析的串接链可达集求解与优化设计[J].西北工业大学学报,2012,30(4):582-588
Shi Jingping,Zhang Weiguo.An Efficient Optimization Method of Daisy Chain Control Allocation Based on Genetic Algorithm [J].Journal of Northwestern Polytechnical University,2012,30(4):582-588(in Chinese)
An Improved Fuzzy Logic Unsteady Aerodynamics Modeling Method
Lü Yongxi,Zhang Weiguo,Wang Minwen,Shi Jingping
1.Department of Automatic Control,Northwestern Polytechnical University,Xi′an 710072,China 2.Science and Technology on Aircraft Control Laboratory,Xi′an 710072,China
We aim at the severe nonlinearity,coupling and hysteresis of the aerodynamic forces and moments when an airplane has post-stall maneuver.The modeling method is based on large-amplitude oscillatory wind tunnel test data analysis results and considers various factors that influence the aerodynamic forces and moments.Then we use the quadratic membership function to transform the angle of attack and its first and second-order derivatives,yaw angle and reduced frequency into fuzzy inputs.The aerodynamic forces and moments calculated with fuzzy rules are used as outputs.Compared with other modeling methods,our modeling method can identify the structure and fuzzy logic model in a unitary way and is versatile.The precision of the model satisfies the requirements for given correlation coefficients.We design the time-scale dynamic and inverse control law according to the singular perturbation theory.We also use the Daisy-chain method to allocate the actuator′s deflection in an over-actuated system.The comparison of simulation results on the“Cobra”typical maneuver under normal and unsteady aerodynamic forces shows the necessity of establishing a precise unsteady aerodynamic model when an airplane has post-stall maneuver and verifies the good control effect of the dynamic inversion method on a nonlinear system.
aerodynamics,angle of attack,aircraft control,actuators,computer simulation,control surfaces,experiments,fuzzy logic,mathematical models,membership functions,wind tunnels;post stall maneuver,unsteady aerodynamics,dynamic inverse,daisy-chain
V249.1
A
1000-2758(2015)06-0971-06
2015-04-23
国家自然科学基金(61374032、51573486)与航空科学基金(20140753012)资助
吕永玺(1990—),西北工业大学博士研究生,主要从事飞行控制方法研究。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
兵器装备工程学报(2021年12期)2022-01-11
北京航空航天大学学报(2021年6期)2021-07-20
北京航空航天大学学报(2020年3期)2021-01-14
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
北京航空航天大学学报(2017年11期)2017-04-23
科技传播(2014年4期)2014-12-02
中国铁道科学(2014年1期)2014-06-21
